2015-08-12
2015-08-12 117
117Реализация.
Проведённые исследования и разработки позволяют предложить два варианта использования асинхронной машины в качестве тормозного генератора установки для измерения коэффициента сцепления: с поддержанием постоянного тока возбуждения и с управлением скольжением при помощи регулирования тока возбуждения.
Использование АГ с поддержанием постоянного тока возбуждения.
Данный вариант использования АГ влечёт за собой лишь небольшие изменения в устройстве ИКС: аналогично варианту, использующему синхронный двигатель, происходит коммутация нагрузочного реостата при помощи транзистора, что и позволяет управлять скольжением. Схема такого варианта представлена на рис..
В данном случае система управления током возбуждения независима от системы управления скольжением, которая осталась неизменной (см. главу 2).
В системе управления током возбуждения задающее воздействие (постоянное значение) сначала сравнивается с сигналом от датчика тока в блоке вычисления ошибки БВО4, а далее следует на переключатель П. Блок, состоящий из переключателя П и нулевой константы иллюстрирует работу алгоритма запирания транзисторов в моменту нулевого напряжения на АГ. Сигналы с датчиков напряжения ДН сравниваются с нулём в переключателе П и, в зависимости от их значения, переключатель устанавливает на своём выходе либо нулевое значение- это происходит, когда сигнал с ДТ равен нулю- либо результат, полученный в БВО-4. Далее сигнал через регулятор возбуждения РВ поступает на ключи переменного тока КПТ.
Таким образом, мы получим простейший способ замены синхронной машины на асинхронную, в котором асинхронный двигатель, подключенный к батарее конденсаторов через плату возбуждения имитирует характеристики ранее использовавшегося синхронного двигателя.
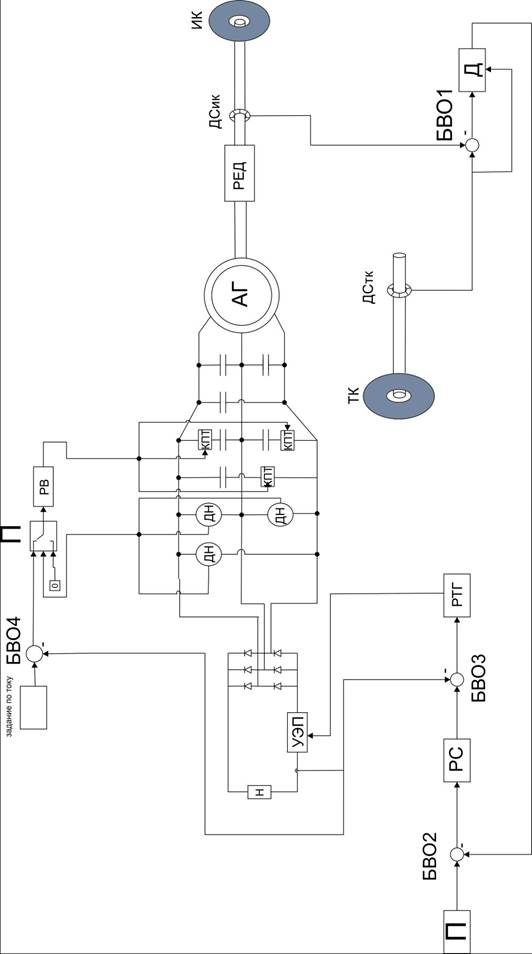
Вариант управлением скольжением при помощи регулирования тока возбуждения, изображенный на рис. предполагает значительные изменения в устройстве ИКС и, в первую очередь это отказ от использования дорогостоящих выпрямителя и силового транзистора. В этом варианте нагрузочный реостат постоянно подключен непосредственно к трём фазам АГ по схеме «звезда» или «треугольник», как на рис.. Задание на скольжение  , как и в предыдущих схемах, сравнивается со значением скольжения, полученным от датчиков скорости измерительного и транспортного колёс, в БВО2, полученный сигнал обрабатывается регулятором скольжения РС, и далее сравнивается с сигналом датчика тока возбуждения ДТ, поступает на переключатель П, работающий по вышеописанному принципу, обрабатывается в регуляторе возбуждения РВ и поступает на управляющий вход ключей переменного тока КПТ.
, как и в предыдущих схемах, сравнивается со значением скольжения, полученным от датчиков скорости измерительного и транспортного колёс, в БВО2, полученный сигнал обрабатывается регулятором скольжения РС, и далее сравнивается с сигналом датчика тока возбуждения ДТ, поступает на переключатель П, работающий по вышеописанному принципу, обрабатывается в регуляторе возбуждения РВ и поступает на управляющий вход ключей переменного тока КПТ.
Обе схемы имеют возможность технической реализации с использованием имеющихся ресурсов УНЛ «забыл как называется». Экономическая выгода от использования второй схемы очевидна - помимо замены синхронного двигателя на более дешевый асинхронный, она предлагает отказаться от использования дорогостоящих выпрямителя и силового транзистора, что позволит изменить планировку электрошкафа управления ЭШУ, установить конденсаторы большей ёмкости за счёт освободившегося пространства. Однако разработка такой схемы требует длительных исследовательских работ и написания соответствующего программного обеспечения.
Конструктивные изменения:
Для установки двигателя достаточной мощности необходимо изготовить деталь «уголок», так как крепёжные отверстия на этой детали соответствуют 100 габариту.
Чертёж детали «уголок» с крепёжными отверстиями под двигатель 112 габарита представлен на рис..
Размещение платы управления возбуждением и конденсаторных батарей внутри ЭШУ изображено на рис..