 2015-08-13
2015-08-13 302
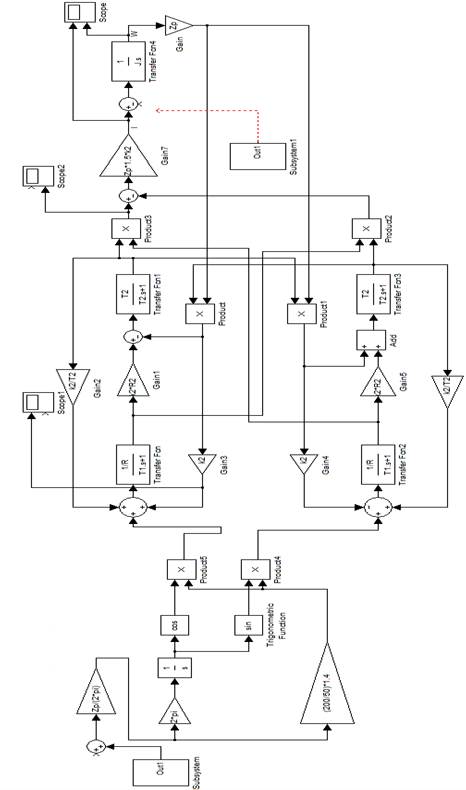
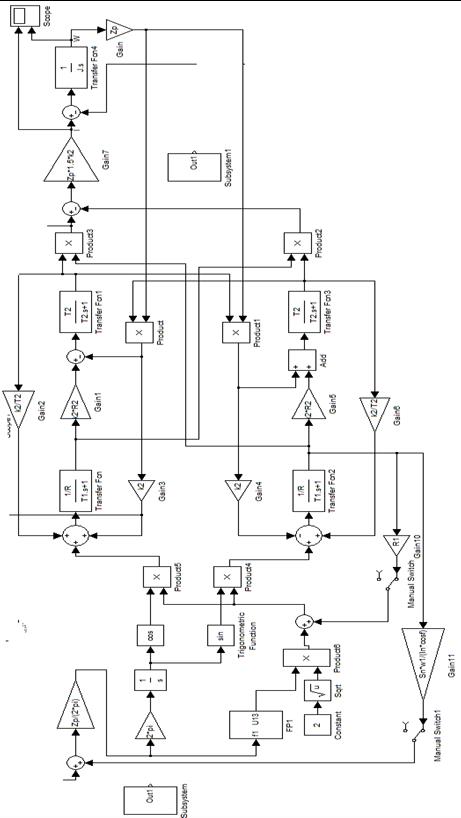
302Опыт 1: Система в координатах α,β без функциональных преобразователей.
Схема установки:
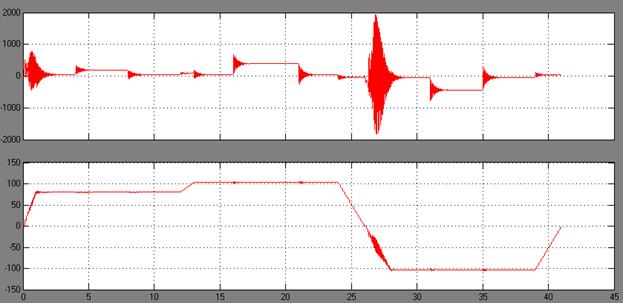
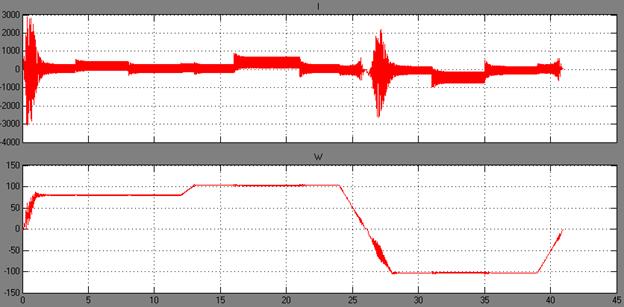
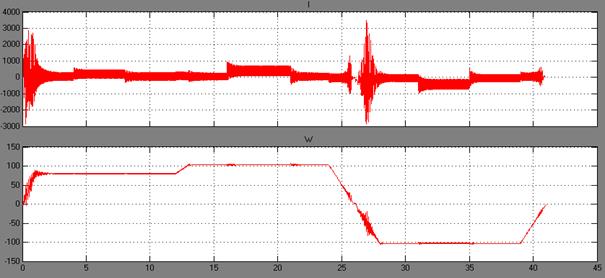
Пуск и работа привода на холостом ходу
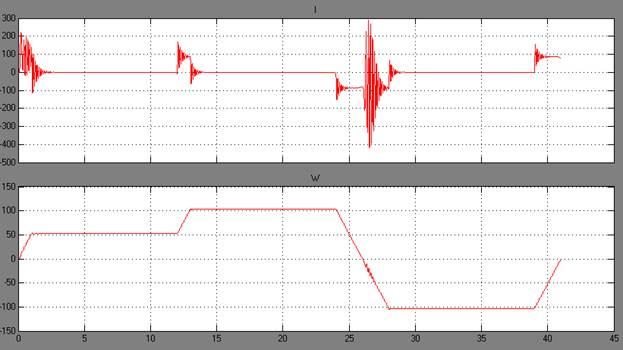
Система полностью отрабатывает заданную тахограмму. Имеются только динамические моменты и бросок тока при реверсировании.
При работе с нагрузкой наблюдается появление ошибки по скорости при набросе. Также появляются сильно колебательные переходные процессы и броски тока и соответственно момента.
Определим перегрузочную способность привода:
Вывод: При скалярном управлении двигателем без дополнительных функциональных преобразователей привод полностью отрабатывает поставленную задачу, однако при работе под нагрузкой наблюдаются броски тока значительно превышающие номинальные значения.
Опыт 2: Исследование системы скалярного управления с функциональными преобразователями.
Схема установки:
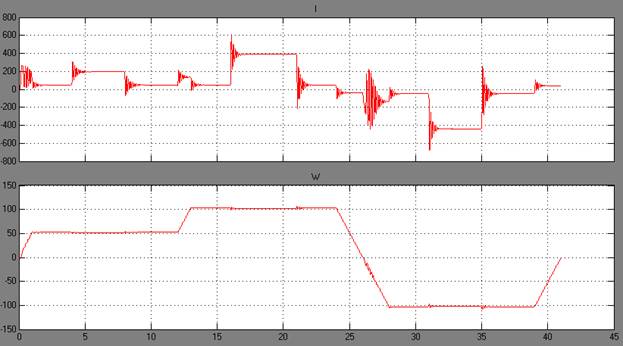
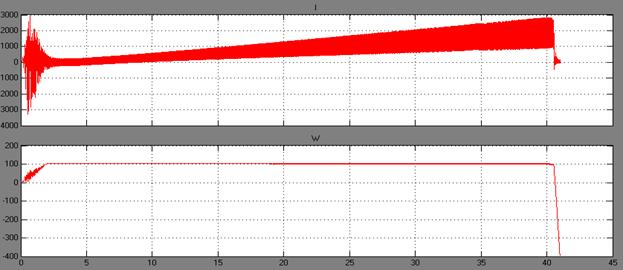
Графики, полученные при использовании функционального преобразователя ФП1 – реализующего зависимость 
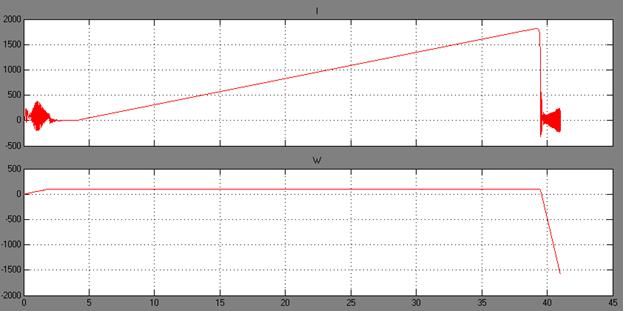
Из полученных диаграмм заметно что переходные процессы разгона, торможения ухудшились, возникают огромные колебания тока, однако при этом в статическом режиме привод работает в нормальном режиме. При этом по сравнению с системой без ФП увеличилась перегрузочная способность привода: 
Использование в системе управления ФП1 и ФП2 – R1:
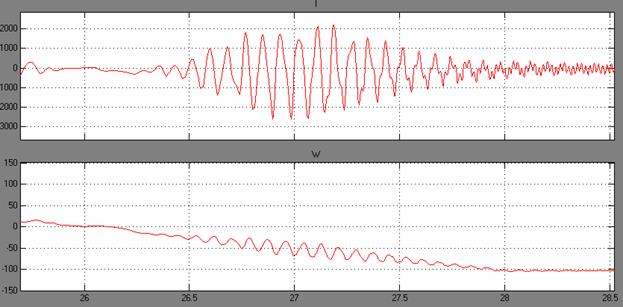
При изменении скорости вращения на противоположную, при переходе через 0 возникают сильные колебания. Это объясняется тем, что ротор сменил направление вращения а вектор потокосцепления еще не успел изменить направление своего вращения. Пиковые значения амплитуды колебаний можно уменьшить, если в системе использовать ограничитель тока.
Перегрузочная способность привода практически не зависит от типа используемых функциональных преобразователей и для всех случаев одинакова.
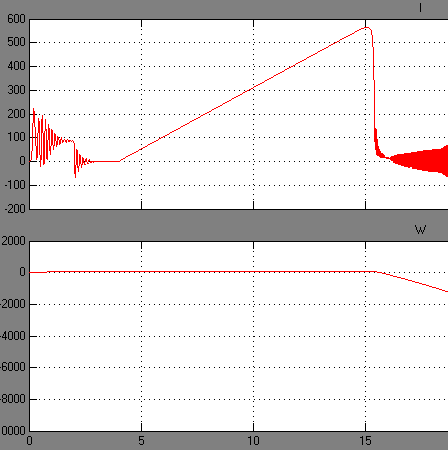
Система с ФП1, ФП2, ФП3 -  предназначенный компенсировать скольжение.
предназначенный компенсировать скольжение.
При использовании всех трех регуляторов получаем диаграмму похожую на все остальные, но имеющую меньшую ошибку регулирования во время наброса нагрузки (падение со 103рад/с до 102рад/с, тогда как в остальных случаях падение со 103 до 101 рад/с)
Вывод: Система без ФП имеет лучшую динамическую и статическую характеристику, однако системы с ФП обладают улучшеными статическими характеристиками, такими как перегрузочная способность, падение оборотов под нагрузкой.








