 2015-10-16
2015-10-16 1383
1383Федеральное агентство по образованию
Новосибирский технологический институт
Московского государственного университета дизайна и технологии (филиал)
УТВЕРЖДАЮ:
Декан факультета прикладных
Направлений подготовки
________________Печурина Г.Г.
«______»________________2008 г.
СИНТЕЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ НА ЭВМ
Методические указания к выполнению курсового проекта
По дисциплине «Теория механизмов и машин»
Для студентов по специальности 150406.65 «Машины и аппараты
Текстильной и легкой промышленности»
Новосибирск 2008
Разработчик доц., к.т.н. Ермолаев В.Ф.
Рецензент проф., д.т.н. Подгорный Ю.И.
Работа выполнена на кафедре механики НТИ МГУДТ (филиала)
ЭТАПЫ СИНТЕЗА КУЛАЧКОВЫХ МЕХАНИЗМОВ
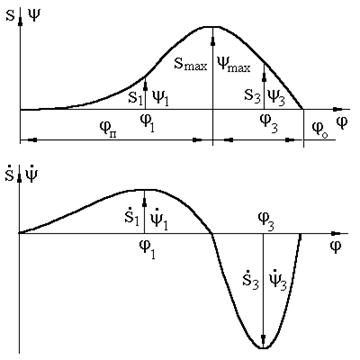
Синтез кулачкового механизма состоит в определении основных параметров его звеньев и построении профиля кулачка по заданным кинематическим и динамическим параметрам механизма. В число этих параметров входят: структурная схема механизма; законы движения кулачка  и ведомого звена (толкателя или коромысла) -
и ведомого звена (толкателя или коромысла) -  или
или  ; фазовые углы поворота кулачка – подъема (удаления)
; фазовые углы поворота кулачка – подъема (удаления)  , верхнего выстоя
, верхнего выстоя  , опускания (сближения)
, опускания (сближения)  , нижнего выстоя
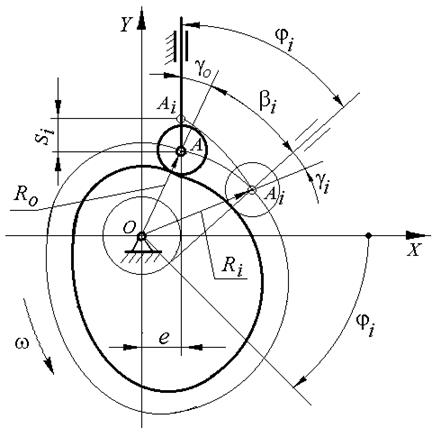
, нижнего выстоя  (рисунок 1); допускаемый угол давления
(рисунок 1); допускаемый угол давления  между кулачком и ведомым звеном (рисунок 2 и 3); максимальное перемещение ведомого звена (линейное
между кулачком и ведомым звеном (рисунок 2 и 3); максимальное перемещение ведомого звена (линейное  или угловое
или угловое  ). Динамические свойства кулачкового механизма определяются законом изменения ускорения ведомого звена. Этот закон движения ведомого звена также задается [1].
). Динамические свойства кулачкового механизма определяются законом изменения ускорения ведомого звена. Этот закон движения ведомого звена также задается [1].

 При структурном синтезе механизма следует учитывать, что конструктивно наиболее просты плоские кулачковые механизмы с непрерывно вращательным движением кулачка. Наибольшее применение получили механизмы с поступательно движущимся ведомым звеном или толкателем и качающимся ведомым звеном или коромыслом (рисунок 2). Замыкание механизма чаще всего выполняется силовым – пружиной. Простота конструкции и меньшие габаритные размеры кулачка делают его более предпочтительным по сравнению с геометрическим замыканием. Но при этом несколько увеличиваются реакции в кинематических парах и расход потребляемой энергии при работе механизма.
При структурном синтезе механизма следует учитывать, что конструктивно наиболее просты плоские кулачковые механизмы с непрерывно вращательным движением кулачка. Наибольшее применение получили механизмы с поступательно движущимся ведомым звеном или толкателем и качающимся ведомым звеном или коромыслом (рисунок 2). Замыкание механизма чаще всего выполняется силовым – пружиной. Простота конструкции и меньшие габаритные размеры кулачка делают его более предпочтительным по сравнению с геометрическим замыканием. Но при этом несколько увеличиваются реакции в кинематических парах и расход потребляемой энергии при работе механизма.
После выбора структурной схемы механизма его синтез выполняется в следующей последовательности.
1ОПРЕДЕЛЕНИЕ ФУНКЦИИ ПЕРЕМЕЩЕНИЯ ВЕДОМОГО ЗВЕНА
На первом этапе определяются перемещения, аналоги скорости и ускорения ведомого звена по формулам:
 (1)
(1)
где  - коэффициенты перемещения, аналогов скорости и ускорения ведомого звена; , - максимальный ход толкателя и максимальный угол качания коромысла; - полный фазовый угол поворота кулачка.
- коэффициенты перемещения, аналогов скорости и ускорения ведомого звена; , - максимальный ход толкателя и максимальный угол качания коромысла; - полный фазовый угол поворота кулачка. 
Значения коэффициентов для наиболее применяемых законов изменения ускорения ведомого звена приведены в таблице 1.
Функция перемещения ведомого звена  или в общем случае может задаваться произвольно. Тогда аналоги скорости и ускорения ведомого звена определяются численным дифференцированием функции перемещения.
или в общем случае может задаваться произвольно. Тогда аналоги скорости и ускорения ведомого звена определяются численным дифференцированием функции перемещения.
2 ОПРЕДЕЛЕНИЕ ОСНОВНЫХ РАЗМЕРОВ КУЛАЧКОВЫХ МЕХАНИЗМОВ
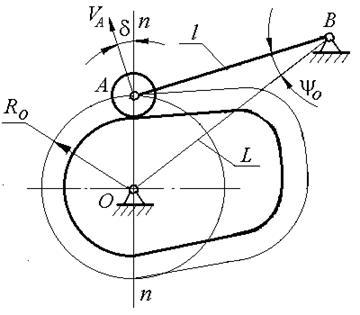
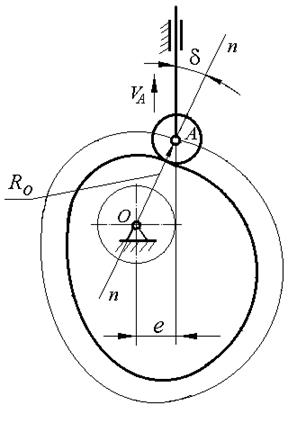
Основными размерами механизма с толкателем являются начальный радиус  центрового (теоретического) профиля кулачка и смещение или эксцентриситет
центрового (теоретического) профиля кулачка и смещение или эксцентриситет  (рисунок 2).
(рисунок 2).
Основными размерами кулачково-коромыслового механизма являются: начальный радиус центрового профиля кулачка, длина  коромысла и расстояние
коромысла и расстояние  между опорами кулачка и коромысла (рисунок 3).
между опорами кулачка и коромысла (рисунок 3).
Определение основных размеров кулачкового механизма основано на ограничении угла давления  в высшей кинематической паре. Угол давления в высшей кинематической паре определяется как угол между нормалью к поверхностям профилей и вектором относительной скорости движения звеньев, составляющих кинематическую пару (рисунки 2 и 3). Допустимые значения угла давления назначают, исходя из назначения механизма, требований к нему и условий его эксплуатации. Для механизма с толкателем обычно
в высшей кинематической паре. Угол давления в высшей кинематической паре определяется как угол между нормалью к поверхностям профилей и вектором относительной скорости движения звеньев, составляющих кинематическую пару (рисунки 2 и 3). Допустимые значения угла давления назначают, исходя из назначения механизма, требований к нему и условий его эксплуатации. Для механизма с толкателем обычно  градуса, для кулачково-коромыслового механизма
градуса, для кулачково-коромыслового механизма  градусов.
градусов.
Таблица 1 – Коэффициенты перемещения, аналогов скорости и ускорения
ведомого звена кулачковых механизмов
| Закон изменения ускорения | Коэффициент перемещения  | Коэффициент аналога скорости  | Коэффициент аналога ускорения  |
| 1. Синусоидальный |  |  |  |
| 2.Косинусоидальный |  |  |  |
| 3. Равномерно убывающий |  |  |  |
4. Параболический 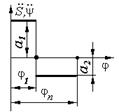 (равноускоренный) (равноускоренный) | при  | ||
 |  |  | |
при  | |||
 |  |  | |
| 5. Полиномиальный |  |  |  |
| 6.Полидинамический |  |  |  |
Коэффициенты  и и  определяются как: определяются как: |  ; ;  . . |
|
|
Угол давления связан с основными размерами механизма следующими зависимостями:
для механизма с толкателем
 ; (2)
; (2)
для кулачково-коромыслового механизма
 . (3)
. (3)
Зависимостям (2) и (3) можно придать геометрическую интерпретацию.
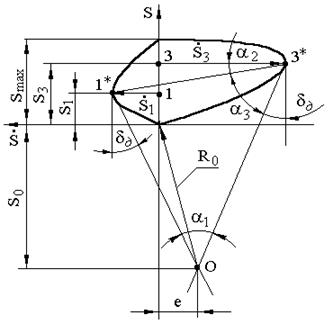
Используя вычисленные по формулам (1) или заданные (рисунок 4) функции перемещения и функции аналога скорости, строят график в координатах  и
и  (рисунки 5 и 6). Для кулачково-коромыслового механизма выбирают полярную систему координат с началом в точке В (рисунок 6), для кулачкового механизма с толкателем – прямоугольную систему координат с началом в точке
(рисунки 5 и 6). Для кулачково-коромыслового механизма выбирают полярную систему координат с началом в точке В (рисунок 6), для кулачкового механизма с толкателем – прямоугольную систему координат с началом в точке  на начальной окружности кулачка (рисунок 5).
на начальной окружности кулачка (рисунок 5).
Оси прямоугольной системы координат направлены в соответствии с повернутым планом скоростей: ось  направлена вверх, а ось
направлена вверх, а ось  направлена влево при вращении кулачка против хода часовой стрелки на фазе подъема
направлена влево при вращении кулачка против хода часовой стрелки на фазе подъема  и вправо – на фазе опускания
и вправо – на фазе опускания  (рисунок 5). Значения масштабов по осям координат
(рисунок 5). Значения масштабов по осям координат  и
и  принимают одинаковыми, что позволяет изображать углы давления без искажения. Максимальное значение угла давления получается в том положении толкателя, когда прямые
принимают одинаковыми, что позволяет изображать углы давления без искажения. Максимальное значение угла давления получается в том положении толкателя, когда прямые  и
и  будут касательными к графику
будут касательными к графику  . Вследствие малого влияния на основные размеры кулачкового механизма отклонений угла давления от максимальных значений вместо касательных из точек
. Вследствие малого влияния на основные размеры кулачкового механизма отклонений угла давления от максимальных значений вместо касательных из точек  и
и  проводят прямые и под углом к оси . Точки и соответствуют максимальным значениям аналогов скорости на фазе подъема и на фазе опускания. Точка пересечения прямых и определит минимально возможный радиус и эксцентриситет .
проводят прямые и под углом к оси . Точки и соответствуют максимальным значениям аналогов скорости на фазе подъема и на фазе опускания. Точка пересечения прямых и определит минимально возможный радиус и эксцентриситет .
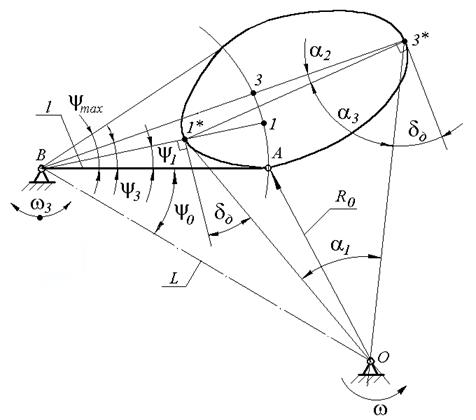
Для кулачково-коромыслового механизма в пределах заданного угла размаха строятся два положения коромысла, соответствующие максимальным значениям угловых аналогов скорости на фазе подъема и на фазе опускания (рисунок 6). При этом длина коромысла задается из конструктивных соображений. Вдоль этих положений от точек 1 и 3 откладываются отрезки [1-1*] и [3-3*], длина которых равна  и
и  . Масштабный коэффициент для отрезков [1-1*] и [3-3*] равен масштабному коэффициенту для коромысла
. Масштабный коэффициент для отрезков [1-1*] и [3-3*] равен масштабному коэффициенту для коромысла  . Отрезок [1-1*] откладывается к точке
. Отрезок [1-1*] откладывается к точке  на фазе подъема, если кулачок и коромысло вращаются в одном направлении, и от точки , если они вращаются в противоположных направлениях. Из точек и проводят прямые и под углом к прямым, перпендикулярным к положениям коромысла.. Точка пересечения прямых и определит минимально возможный радиус и расстояние .
на фазе подъема, если кулачок и коромысло вращаются в одном направлении, и от точки , если они вращаются в противоположных направлениях. Из точек и проводят прямые и под углом к прямым, перпендикулярным к положениям коромысла.. Точка пересечения прямых и определит минимально возможный радиус и расстояние .
Для аналитических методов определения основных размеров кулачковых механизмов составлены алгоритмы 1 и 2, обозначения параметров в которых соответствуют параметрам на рисунках 4,5 и 6.
|

Алгоритм 1 – Определение основных размеров кулачкового
механизма с толкателем
1. 
2. 
3. 
4. 
5. 
6. 
7. 
8.  .
.
Алгоритм 2 - – Определение основных размеров кулачково-коромыслового
механизма
1. 
2. 
3. 
4. 
5. 
6. 
7.
8. 
9. 
10. 
3 ОПРЕДЕЛЕНИЕ ПРОФИЛЯ КУЛАЧКА
Расчет начинается с построения центрового профиля кулачка методом инверсии или обращенного движения [1].
Если для кулачкового механизма с толкателем за полярную ось принять прямую  , то формулы для полярных координат
, то формулы для полярных координат  в
в  том положении кулачка (
том положении кулачка ( ) получаются из расчетной схемы, приведенной на рисунке 7. Расчет профиля кулачка с толкателем осуществляется по алгоритму 3.
) получаются из расчетной схемы, приведенной на рисунке 7. Расчет профиля кулачка с толкателем осуществляется по алгоритму 3.
Алгоритм 3 – Определение профиля кулачка с толкателем
1. 
2. 
3. 
4. 
 В формулах алгоритма 3 автоматически учитывается знак эксцентриситета .
В формулах алгоритма 3 автоматически учитывается знак эксцентриситета .

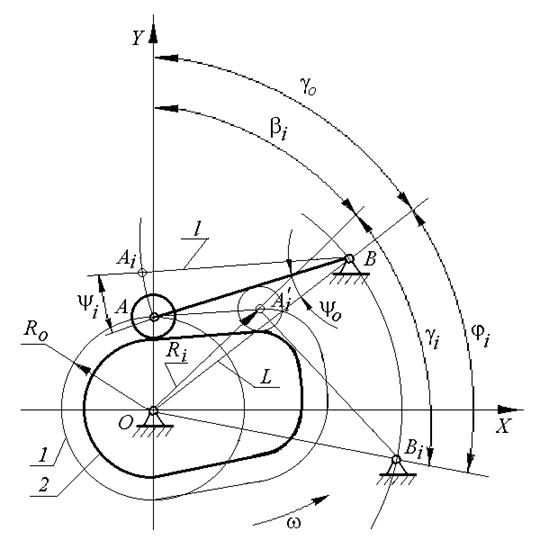
Если для кулачково-коромыслового механизма за полярную ось принять прямую то формулы для полярных координат в том положении кулачка () получаются из расчетной схемы, приведенной на рисунке 8. Расчет профиля кулачка с коромыслом осуществляется по алгоритму 4.
Алгоритм 4 – Определение профиля кулачка с коромыслом
1. 
2. 
3. 
4. 
5. 
В формуле 5 алгоритма 4 знак плюс берется, если на фазе удаления направления вращения кулачка и коромысла противоположны, и знак минус – если одинаковы.
В формулах алгоритмов 3 и 4 направление отсчета углов  противоположно направлению вращения кулачка.
противоположно направлению вращения кулачка.
4 ОПРЕДЕЛЕНИЕ РАДИУСА РОЛИКА
При проектировании кулачкового механизма с роликом значение  радиуса ролика может быть задано конструктором. В этом случае производится проверка правильности выбранного значения. Если значение не задано, то оно определяется из условия удовлетворения следующих неравенств [1,2,3]:
радиуса ролика может быть задано конструктором. В этом случае производится проверка правильности выбранного значения. Если значение не задано, то оно определяется из условия удовлетворения следующих неравенств [1,2,3]:
 , (4)
, (4)
где  - минимальный радиус кривизны центрового профиля кулачка.
- минимальный радиус кривизны центрового профиля кулачка.
Конкретные значения назначаются в соответствии со стандартным рядом диаметров и длин (ГОСТ 6636-69).
Общая формула, определяющая радиус кривизны профиля кулачка как полярной кривой, имеет вид [4]:
 (5)
(5)
где  - радиус-вектор центрового профиля кулачка и его производные в
- радиус-вектор центрового профиля кулачка и его производные в  точке.
точке.

Произведя вычисления по формуле (5) для  легко определить значение
легко определить значение  .
.
В разделе 3 рассмотрен расчет полярных координат профиля кулачка - ( ). По этим значениям полярных координат для каждых трех точек на центровом профиле кулачка
). По этим значениям полярных координат для каждых трех точек на центровом профиле кулачка  (рисунок 9) определяется радиус описанной окружности
(рисунок 9) определяется радиус описанной окружности  , который и будет приближенным значением радиуса кривизны центрового профиля в точке. Координаты точек
, который и будет приближенным значением радиуса кривизны центрового профиля в точке. Координаты точек  в системе
в системе  :
:
 (6)
(6)
Длина сторон треугольника 
 , (7)
, (7)
где 
Из треугольника  , радиус кривизны центрового профиля (радиус окружности):
, радиус кривизны центрового профиля (радиус окружности):
 (8)
(8)
 ,
,
где  - полупериметр треугольника .
- полупериметр треугольника .
Определение минимального радиуса кривизны центрового профиля кулачка по трем точкам и радиуса ролика по формулам (7) и (8) оформлено алгоритмом 5.

Алгоритм 5 – Определение радиуса ролика.
1. 
2. 
3. 
4. 
5. 
6. 
7. 
8. 
9. 
10. 
11. 
12. 
13. 
14. 
15. 
16. 
17. 
18. 
19. 
20. 
21. 
22. 
23. 
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Артоболевский И.И. Теория механизмов и машин.– М.: Наука, 1975, 1988.– 639 с.
2. Левитская О.Н., Левитский Н.И. Курс теории механизмов и машин.– М.: Высшая школа, 1978.– 269 с.
3. Фролов К.В. и др. Теория механизмов и машин: Учебник для втузов; Под ред. К.В. Фролова.– М.: Высшая школа, 1987,2001 – 496 с.
4. Юдин В.А., Петрокас Л.В. Теория механизмов и машин.– М.: Высшая школа, 1977.– 527 с.

