 2020-08-05
2020-08-05 150
150Тема 3. Электромеханические исполнительные устройства
Общие сведения
Электромеханические исполнительные устройства – это преобразователи электрической энергии в механическую. Электромеханические исполнительные устройства используются для воздействия на объекты управления с целью их механического перемещения (поступательного или вращательного).
Электромеханические исполнительные устройства делят на электродвигатели и электромагнитные устройства специальных конструкций, которые используют в качестве муфт, задвижек, клапанов и пр.
К электродвигателям, применяемым в автоматике в общем случае могут быть предъявлены следующие требования:
- Широкий диапазон изменения частоты вращения вала двигателя;
- Возможность реверса;
- Малые габариты и масса при относительно большой мощности;
- Малая инерционность;
- Надежность в работе и долговечность;
- Простота схем управления.
В автоматических гидрометеорологических системах широко используются управляемые двигатели постоянного тока и двухфазные двигатели переменного тока.
Двигатели постоянного тока
Первый электродвигатель постоянного тока был создан в России в 1834 г. академиком Б. С. Якоби.
Электродвигатели постоянного тока широко используются в схемах автоматики, так как они позволяют плавно регулировать частоту вращения в большом диапазоне, т. е. получать практически любые частоты.
На рис. 3.1 показано устройство электродвигателя постоянного тока. Электромагнитные полюсы 1 статора создают магнитный поток Ф, пронизывающий секции обмотки якоря 2, по которым протекает электрический ток ia. Напряжение постоянного тока U подводится к обмотке якоря через щетки 3 и коллектор.
В результате взаимодействия магнитного потока Фо электрическом током ia якоря возникает вращающий момент и якорь вращается в электромагнитном поле с частотой вращения п.
|
|
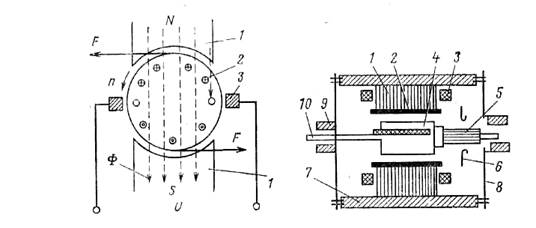
Рис. 3.1
Вращающий момент Мф пропорционален магнитному потоку Ф статора и току Iя, протекающему в обмотке якоря. Направление вращающего момента зависит от соотношения направлений Мф и Iя.
Частота вращения вала двигателя описывается формулой:
N= 
Из выше изложенного следуют общие правила управления двигателем:
1. Для изменения направления вращения якоря необходимо изменить либо направление тока якоря, либо направление магнитного потока полюсов (тока в обмотке возбуждения).
При одновременном изменении тока якоря и потока полюсов направление вращения вала не меняется.
2. Для изменения частоты вращения вала двигателя нужно менять либо величину тока якоря, либо силу тока обмотки возбуждения.
Реальные возможности управления двигателем зависят от его конструктивных особенностей.
В зависимости от системы возбуждения полюсов двигатели постоянного тока делятся на двигатели с независимым (рис. 3.2, а), параллельным (рис.3.2,б), последовательным (рис. 3.2,в), смешанным (рис. 3.2, г) электромагнитнымвозбуждением и двигатели с магнитным возбуждением (с постоянными магнитами) (рис. 3.2, д).
В метеорологических измерительных системах в качестве управляемых двигателей чаще всего используют двигатели с независимым возбуждением - с электромагнитным или магнитным возбуждением.
На рис. 3.3 показана реверсивная схема управления двигателем постоянного тока с магнитным возбуждением.
Студентам предлагается самостоятельно объяснить:
1. Каким образом в этой схеме обеспечивается реверс двигателя.
2. От чего зависит частота вращения вала двигателя.
3.3. Электродвигатели переменного тока
Около 90 % всех двигателей, выпускаемых промышленностью, составляют асинхронные двигатели переменного тока.
В следящих системах и других автоматических системах, в том числе и метеорологических измерительных системах, наибольшее распространение получили асинхронные двухфазные двигатели с полым немагнитным ротором.
На статоре асинхронного двухфазного двигателя расположены две обмотки. Магнитные оси обмоток сдвинуты в пространстве на угол 90 º. Питание обмоток осуществляется токами одинаковой частоты, но сдвинутыми по фазе на p/2. Это позволяет получить в статоре вращающееся магнитное поле с частотой вращения равной частоте токов статорных обмоток. Ротор двигателя представляет собой полый алюминиевый стакан. При включении питающих токов в теле ротора под действием вращающегося магнитного поля статора наводятся вихревые тока. Взаимодействие этих токов с магнитным полем статора приводит к появлению вращающего момента, действующего на ротор. Направление вращения ротора совпадает с направлением вращения магнитного поля статора.
В управляемом электроприводе одна из обмоток двигателя включена в сеть, и ее называют возбуждающей. Вторая обмотка называется управляющей. На нее подается напряжение, снимаемое, как правило, с усилителя. При этом вращающий момент двигателя зависит от произведения напряжений возбуждения Uв и управления Uя и синуса угла сдвига фаз между ними:
Мвр = k Uв Uя sina,
Где k – коэффициент пропорциональности, зависит от конструктивных особенностей двигателя и от частоты питающих токов. Чем выше частота тока, тем больше вращающий момент. Поэтому номиналы частот двигателей составляют 50, 330, 400, 500, 800 и 1000 Гц. Это позволяет уменьшать габариты двигателей и повышать их мощность.
На рис. 3.4 показаны обозначение двухфазного асинхронного двигателя и схема его включения.

Литература:[3, с. 302-311; 4, с. 50 – 52, 56 – 62].
Вопросы для самоконтроля
1. Поясните функциональное назначение исполнительных устройств.
2. Поясните понятие «Управляемый электропривод».
3. Перечислите основные типы двигателей постоянного и переменного тока, используемых в управляемом электроприводе.
4. Каким образом можно изменять направление вращения якоря в двигателях постоянного тока с независимым возбуждением?
5. Назовите способы управления частотой вращения якоря двигателя постоянного тока с независимым возбуждением.
6. Назовите основные элементы конструкции двухфазного двигателя переменного тока.
7. Поясните условия возникновения вращающего момента ротора.
8. Каким образом может осуществляться реверс в двухфазном двигателе переменного тока?
9. Приведите примеры применения управляемых электродвигателей в автоматических гидрометеорологических системах.








