2015-03-27
2015-03-27 399
399лекцій з дисципліни
«Радіонавігаційні системи»
за спеціальністю 5.05090103
" Технічна експлуатація наземних засобів радіоелектронного забезпечення польотів "
Склав викладач: Шаповалов О.Я.
Конспект обговорений
на засіданні циклової комісії
радіоелектронне устаткування
наземних засобів
Протокол № ____ від «___»_____20__р.
Голова комісії __________ Рудий С.В.
(підпис)
м. Кривий Ріг
2013 р.
У даному посібнику розглядаються питання по вивченню радіонавігаційних систем яке використовується в аеропортах України їх схеми, технічний опис, опис конструкцїї та перевірки технічного стану. Посібник призначається для вивчення теоретичної частини, самостійного вивчення схем електроживлення, проведення практичних та лабораторних робіт та виконання технологічного обслуговування.
Составитель О.Я. Шаповалов
Рецензент C.В. Рудий
ГЛАВА 1
ЭЛЕМЕНТЫ ОБЩЕЙ ТЕОРИИ НАВИГАЦИИ
1.1. Общая характеристика навигационных задач
Первоначально под термином "навигация" подразумевались лишь способы вождения морских кораблей настоящее время термин распространен и на способы вождения объектов, как самолеты, вертолеты, космические корабли и не относится к вождению объектов, траектории движения, которых заранее жестко определены и положение которых известно в любой момент времени, например железнодорожных составов, автомобилей. Таким образом, навигация — это наука о методах и средствах вождения подвижных объектов по установленным траекториям.
|
|
|
В связи со специфическими особенностям вождения морских,
воздушных и космических объектов в навигация выделились
соответствующие направления: морская навигация, воздушная (аэронавигация) и космическая.
Основная задача навигации — вывод подвижного объекта по оптимальной (наивыгоднейшей для данных условий) траектории в заданную точку или область пространств в заданный момент времени. Решение этой общей задачи подразделяют частных задач, разнообразных по характеру и метода решения. К частным задачам навигации относят:
выбор и расчет оптимальной траектории движения объекта и временных характеристик движения (при подготовке к полету и в процессе полета с учетом изменения условий полета);
измерение основных навигационных параметров движения объекта, т. е. величин, характеризующих текущие координаты объекта, направление и скорость его перемещения.
сравнение результатов определения навигационных параметров с заданными или расчетными значениями разработка корректирующих команд (сигналов), обеспечивающих движение объекта, необходимое для решения основной навигационной задачи.
|
|
|
Кроме того, из определения основной навигационной задачи следует, что к указанным частным задачам необходимо добавить операции по непосредственному воздействовать на органы управления объекта с целью изменения его углового положения (либо стабилизации) относительно центра масс. Процессы навигации применительно к конкретным типам подвижных объектов получили названия самолето-, вертолето- и кораблевождения. (для морских судов). При этом единый процесс обеспечения движения ВС при самолето- и вертолетовождении разбивают на две взаимосвязанные задачи:
собственно навигационную задачу перемещения центра масс ВС заданной пространственно - временной траектории и пилотирование — управление угловым положением ВС относительно цен: его масс (изменение или стабилизация углов крена, тангажа.
В полете на воздушных трассах и в районах аэропортов: одновременно находиться большое число ВС, что приводит к не ходимости постоянного диспетчерского контроля и регулировка процесса выполнения полетов, поддержания установленного именного процесса движения ВС в воздушном пространстве для обеспечения регулярности и безопасности полетов. Этот круг задач решают методе и средствами управления воздушным движением (УЗД) путем посредственной передачи команд (управляющей информации) борт ВС руководителем полета либо автоматической передачи данных а также путем суточного и перспективного планирования воздушного движения.
Для определения навигационных параметров в процессе полета ВС применяют различные технические средства навигации, которые в соответствии с используемыми в них физическими принципа, работы можно разделить на пять основных групп.
1..Геотехнические средства
2. Астрономические
3. Светотехнические
4. Инерциальные средства
5. Радиотехнические средства
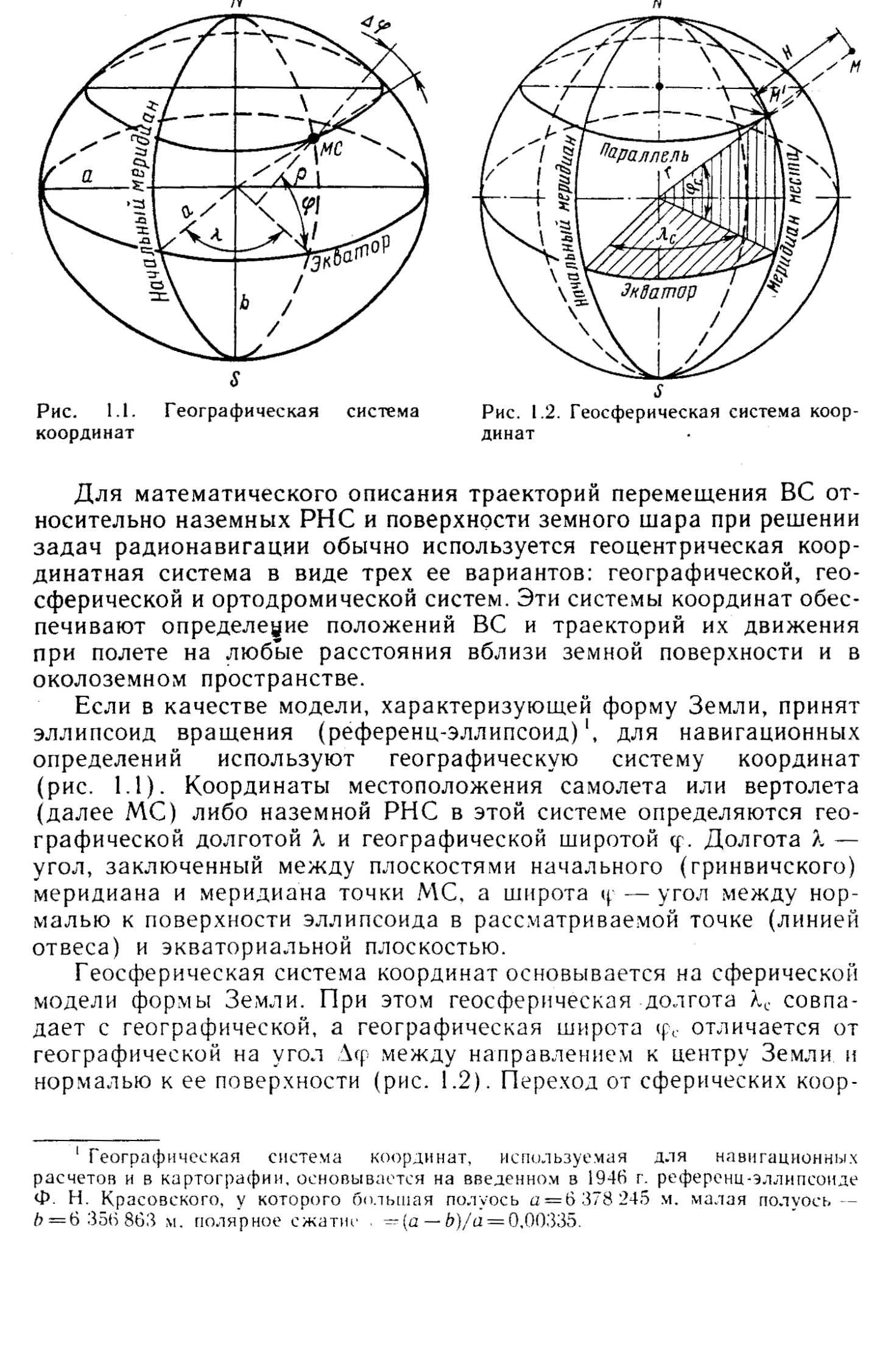
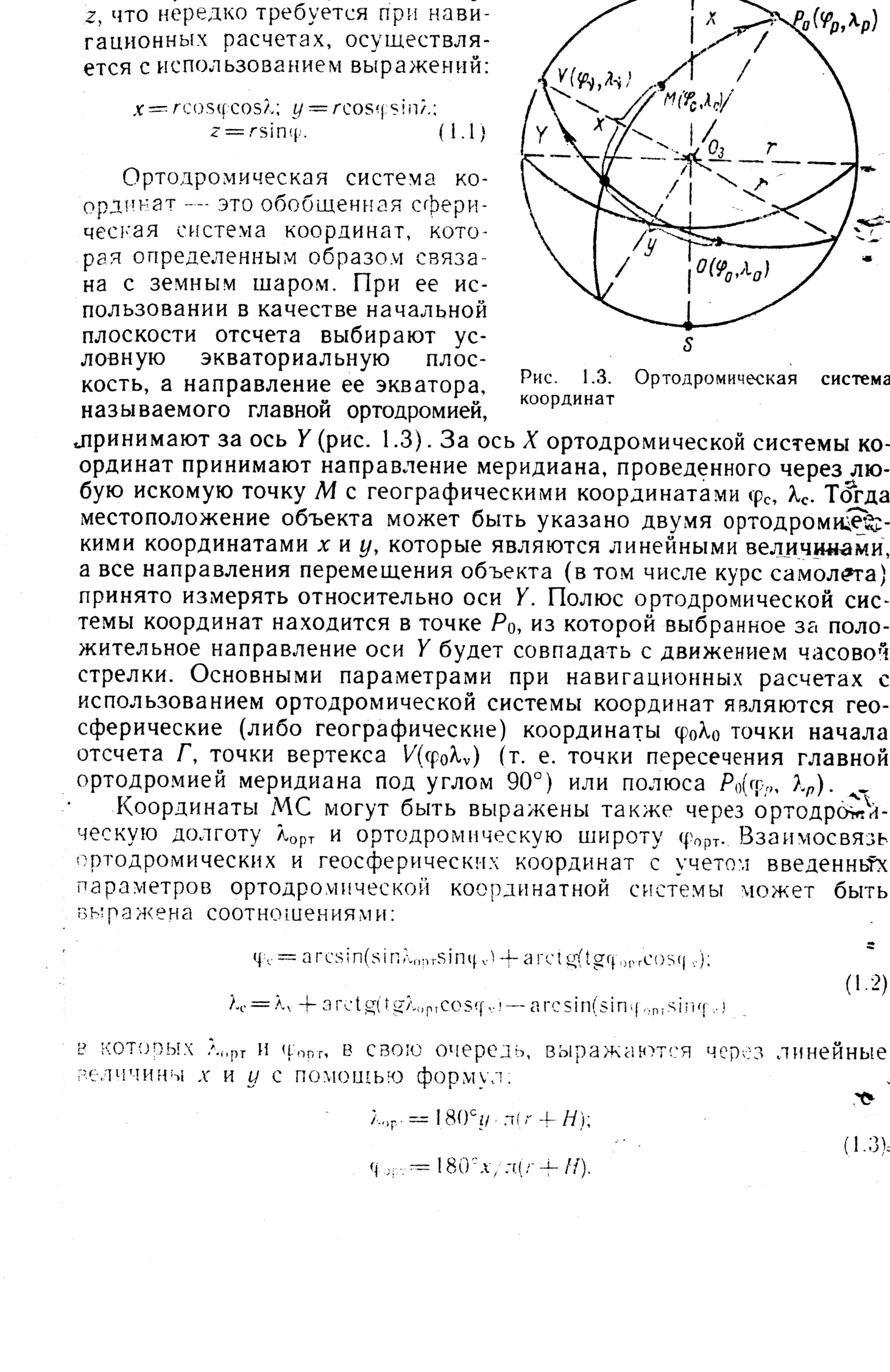
1.2. Системы координат
Для определения параметров, характеризирующих положение и движение ЛА в околоземном и космическом пространстве, используются навигационные сигналы радио-, оптического и звукового диапазонов.
Таким образом, в качестве навигационного пространства целесообразно сообразно полагать пространство, содержащее перемещающие навигационный сигнал. От метрических свойств такого пространства! будут зависеть траектории сигналов и, в частности, геометрические свойства радиоволновых полей, используемых РНС.
При использовании современных радионавигационных методов и средств навигационное пространство характеризуют обычно метрикой, полагая траектории сигналов в виде прямых линий! Однако в некоторых случаях метрика рассматриваемого пространства отклоняется от евклидовой. Действительно, траектории сигналов лов РНС, работающих в декаметровых и метровых диапазон радиоволн, будут искривленными вследствие рефракции волн в сфере, соответственно искривленным будет и навигационное пространство! Также могут искривляться и траектории сигналов пространстве под влиянием полей тяготения. При использовании РНС, работающих на длинных волнах, которые дифрагируют вокруг Земли, навигационное пространство будет иметь вид той и иной области поверхности земного шара, а геодезические линии этих поверхности будут соответствовать траекториям сигналов.
Обычно задачи воздушной навигации стремятся аналитически решать в неискривленном пространстве, вводя соответствующие правки на возможное отклонение метрики от евклидовой (поправ на рефракцию радиоволн в атмосфере и ионосфере, на сферичное земного шара и др.). Хотя воздушная навигация по существу трехмерная однако в практике штурманских расчетов часто используют более простую двумерную модель навигационного пространственно (плоскость), а третью координату — высоту — вводят обособленную от двух поверхностных координат. Плоской модели навигационного пространства соответствуют и основы построения навигационного карт. Если подобное упрощение оправдано в воздушной навигации: решение задач навигации ВС в космическом пространстве требу большей точности и, следовательно, более строгого учета фактической кой метрики навигационного пространства соответствующего числа измерений. Поэтому в общем случае навигационное пространство следует полагать искривленным, метрика которого отклоняется с евклидовой (риманово пространство). При этом стремятся алгоритм мы решения навигационных задач для неевклидовых пространств представлять как обобщение алгоритмов обычной евклидовой навигации.
|
|
|
Рассмотрим способы задания координат в трехмерных навигационных пространствах с линейной метрикой. Координатные систем, мы, используемые для решения навигационных задач, классифицируют по следующим признакам: положению начала координатной системы: ориентации первой плоскости отсчета; связанности с тег лом, в центре которого размещено начало координат, и по геометрическим свойствам координат.
Первый признак классификации предполагает возможности размещения начала координатной системы в центре естественного космического тела (планеты, звезды, их совокупности), на его поверхности или вне этого тела (например, может совмещаться с I ВС). Поэтому в зависимости от указанного положения начала координат относительно естественного космического тела их можно подразделить соответственно на астроцентрические, топоцентрические и экзоцентрические. К первой группе из названных систем координат относят гео-, гелио-, селеноцентрическую и другие системы, ко второй — геотопо- и селенотопоцентрическую, к третьей группе — геоэкзо-, селеноэкзоцентрическую и др.
Любая из перечисленных координатных систем может оказаться более удобной в зависимости от условий навигации, поэтому на различных этапах полета объекта может осуществляться переход от одной координатной системы к другой путем преобразования координат. Для задания и отсчета координат объектов на поверхности Земли и в околоземной зоне целесообразно использовать геоцентрическую систему координат, одна координатная плоскость которой проходит через плоскость земного экватора, а две другие перпендикулярны к первой, т. е. геоцентрическую экваториальную прямоугольную несвязанную систему. Для межпланетной навигации удобно использовать гелиоцентрическую орбитальную сферическую несвязанную систему координат.
|
|
|