2015-03-08
2015-03-08 1485
1485ЛЕКЦІЯ
З навчальної дисципліни
Військова підготовка
З розділу4.Військово-технічна і військово-спеціальна підготовка
З модулю 4.2. Бортові радіонавігаційні системи авіаційних комплексів.
БЗМ 4.2.1. Частотні та імпульсні радіонавігаційні пристрої та системи.
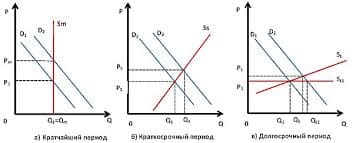
ЗМ 4.2.1.1. Частотні радіонавігаційні пристрої та системи(РНП та С).
Тема лекції № 2: Допплерівські вимірювачі швидкості та куту зносу.
Навчальний потік - студенти.
Година: 90 хвилин.
Місце: лекційна аудиторія.
Навчальна та виховна ціль: розглянути ефект Доплера, галузь застосування ДВШЗ;принцип побудови однопроменевих і багатопроменевих ДВШЗ за структурною схемою;особливості роботи ДВШЗ.
Навчальні питання і розподіл години:
Вступ 10 хв.
1.Суть ефекту Доплера. Галузь військового застосування ДВШЗ. 25хв. 2.Принцип побудови однопроменевих і багатопроменевих ДВШЗ
за структурною схемою, основні співвідношення. 35 хв.
3.Особливости роботи ДВШЗ. 15хв.
Висновки та відповіді на питання 5 хв.
Навчально-матеріальне забезпечення:
1. Слайди
2. Плакат "ДВШЗ".
Навчальна література:
1. Дудко Г.К., Рєзников Г.Б. Доплеровские вимірники швидкості й кута зносу літака. Радянське радіо. - М.: 1964, с. 17-59.
2.Дудко Г.К., Новокшанов М.Н., Соломянный В.П. Авіаційні радіонавігаційні пристрої й системи - КВИАВУ ВВС. 1969. с. 169-176.
3.М.С.Ярликів,В.А.Болдін, А.С.Богачев Авіаційні радіонавігаційні пристрої й системи - ВВИА ім. Н.Е. Жуковського, 1980, с. 113-119.
ВСТУП
Для рішення ряду навігаційних завдань, особливо основного завдання, визначення місця, необхідно знати швидкість переміщення літака відносної земної поверхні, тобто шляхову швидкість. Завдання визначення шляхової швидкості може бути вирішена двома способами: шляхом рішення векторного трикутника швидкостей і шляхом безпосередніх вимірів. Для цього застосовуються автономні радіонавігаційні пристрої, засновані на використанні ефекту Допплера. Ці РНУ одержали назву допплерівських вимірників швидкості й зносу (ДВШЗ). Вони служать для визначення шляхової швидкості й кута зносу літального апарата або вектора повної шляхової швидкості літального апарата.
Для вимірювання з високою точністю шляхової швидкості та куту зносу в допплерівських вимірювачах доцільно використовувати парі променів з випромінюванням уперед-назад та вліво-вправо. На практиці даний принцип реалізується в багатопроменевих ДВШЗ з різною конфігурацією промінів. Практичне використання знайшли 3-х та 4-х променеві ДВШЗ з жорстко закріпленими або стабілізованими антенами.
Внаслідок великого впливу тангажу на похибки виміру, а також у цілях спрощення системи стабілізації антени часто обмежуються стабілізацією антени тільки по тангажу, а при польотах з великим кутом крену застосовують автоматичне відключення ДВШЗ. На сьогоднішній лекції мі розглянемо принцип побудови, основні співвідношення та особливості роботи різних ДВШЗ.
Суть ефекту Доплера. Галузь військового застосування ДВШЗ
1.1. Суть єфекту Доплера.
Ефектом Доплера називається явище зміни частоти коливань, випроменених не яким джерелом і сприйманих приймачем, що спостерігається при взаємному відносному переміщенні джерела й приймача.
Фізичну сутність ефекту Доплера на наступному прикладі. Припустимо, що на літальному апарату встановлена найпростіша радіолокаційна станція, що має у своєму составі передавач безперервних коливань і приймач. І нехай у деякий момент часу t 1 літальний апарат
перебуває в крапці А (рис.1), а нерухливий предмет, що відбиває коливання передавача, —в крапці В. Далі будемо думати, що літальний апарат переміщається уздовж лінії АВ зі швидкістю W.
Рис1. 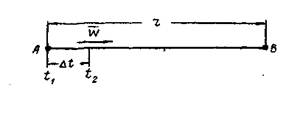 |
Випроменені в момент часу t 1 коливання частоти f0 досягнуть крапки В, що відстоїть від крапки А, на відстані r, у момент часу T1= t 1 + r ⁄ c. Коливання, випроменені в деякий момент часу t2, досягнуть крапки В у момент часу T2 = t2 + r – W Δt ⁄ с, де Δt = t2 - t1.
Отже, у крапці В у перебіг часу ΔT= T2 -T1 = c – W ⁄ c • Δt спостерігаються коливання, випроменені антеною передавача за час Δt. За час Δt передавач випромінює п циклів коливань, причому п = f0 Δt.
Частота коливань fВ, спостережувана в крапці В, відрізняється від частоти f0 і може бути визначена в такий спосіб:
f = n ⁄ ΔT = c ⁄ c -W • f0 (1)
Якщо тепер прийняти крапку В, у якій перебуває предмет, що відбиває, за джерело коливань частоти fв і повторити ті ж міркування з обліком того, що приймач, установлений на літальному апарату, зближається із предметом, що відбиває, що перебуває в крапці В, одержимо наступне вираження для частоти коливань fа, прийнятих у крапці А:
f= c + W ⁄ c • f B. (2)
Підставивши у вираження (2) значення fВ з формули (1), для f А одержимо
f = c +W ⁄ c – W • f0 (3)
Розклавши останнє вираження в ряд Маклорена, одержимо
f = f0 (1 + 2W ⁄ c + 2W2 ⁄ c2 + …)
Але тому що W<< с, те можна обмежитися двома першими членами ряду
f ≈ f0 (1+ 2W ⁄ c) (4)
З вираження (4) треба, що частота прийнятих коливань одержала збільшення, величина якого FД найдеться в такий спосіб:
FД = 2W ⁄ c • f 0 = 2W ⁄ λ0, (5)
де λ0 = c ⁄ f0 — довжина хвилі випромінюваних коливань.
Отримане збільшення частоти прийнятих коливань називають частотою Доплера.
Проробивши аналогічні попередні викладення, легко можна переконатися, що при видаленні літального апарата від крапки В частота вихідних коливань зменшується на величину FД = 2 W ⁄ λ0. У цьому випадку частоті Доплера приписується знак мінус.
До тепер ми припускали, що літальний апарат переміщається з деякою швидкістю W уздовж лінії АВ, що з'єднує його із предметом, що відбиває. Якщо ж переміщення літального апарата відбувається в деякому іншому напрямку, що становить кут γ с напрямком відрізка АВ, те у формулу (5) замість W необхідно підставити значення радіальної складової швидкості літального апарата щодо крапки В Wr = W cos γ. У цьому випадку формула для доплеровской частоти запишеться у вигляді
FД = 2 W ⁄ λ0 cos γ (6)
1.2. Галузь військового застосування ДВШЗ
По призначенню, способу побудови допплерівські вимірювачі вектору швидкості ЛА можуть бути розділені на два типи: літакові та вертольоті ДВШЗ.
Вектор швидкості літака завжди спрямований уперед і відхилений від породільної осі літака на кут не більш декількох десятків градусів. Діапазон швидкостей, які вимірюються літаковими ДВШЗ, звичайно лежить у межах від 100-200 км/год. до 1000-4000 км/рік., діапазон робочих висот – від десятків метрів до десятків кілометрів. У зв'язку з цими особливостями в літакових ДВШЗ можливо вибрати таке розташування антенних промінів, при якому знак F д був би заздалегідь відомий, а величина F д min завжди була б більше нуля.
Пересування вертольоту в просторі може бути довільним. При цьому вектор земної швидкості вертольота може бути рівний нулю та змінювати свою спрямованість. Тому основна різниця вертолітних ДВШЗ від літакових визначається необхідністю виміру F д аж до значень, близьких до нуля, а також необхідністю визначення знаку допплерівських зміщень частоти. У вертолітних ДВШЗ завжди необхідно визначити три складові вектори земної швидкості, які приймаються не менш ніж по трьом не компланарним променям. Діапазон робочих висот вертолітних ДВШЗ лежить у межах від нуля до декількох кілометрів.
У теперішній годину находять застосування літакові ДВШЗ з 3-х та 4-х променевими антенами. Частіше всього промені ДВШЗ спрямовуються як ребра правильної піраміди з основою, розташованою в горизонтальній площині. Антени ДВШЗ можуть бути як жорстко зв'язані, так і не зв'язані з корпусом ЛА. В останньому випадку смороду можуть бути поворотні, неповоротні, стабілізовані по крені та тангажу, або поворотними стабілізованими.
Допплерівській вимірювач сумісно з обчислювачем на борті ЛА визначає проекції вектора земної швидкості в системі координат, жорстко зв'язаної з антенним пристроєм і називаються антенною системою координат.
У більшості випадків ДВШЗ використовують у комплексі з навігаційним обчислювачем (ЕОМ). У навігаційний обчислювач додатково вводяться дані про повітряну швидкість (від датчиків повітряної швидкості ДВС) і про курс літального апарата (від курсової системи). Подібні комплекси апаратури(рис.2) називаються автономними доплерівскими навігаційними системами (ДНС).
 |

 вихідні величин
вихідні величин
 | |||
 | |||



|
|
|
 КЗ
КЗ

 КЗ
КЗ
 |
|
до автопілоту
Рис.2. Автономна доплерівська навігаційна система
У навігаційний обчислювач завчасно вводять координати контрольних пунктів маршруту(у тому числі початкового й кінцевого пунктів маршруту), значення заданих шляхових кутів і деякі інші дані. На основі цих даних і вихідних даних доплерівского вимірника навігаційний обчислювач вирішує наступні завдання: визначає курс проходження на обраний пункт маршруту, визначає поточні координати літального апарата(географічну довготу й широту) або ж шлях, пройдений по ортодромії і бічне відхилення від ортодромії, обчислює виправлення в курс, що залишився відстань і час польоту до обраного пункту маршруту й т.п. При необхідності навігаційний обчислювач може виробляти керуючий сигнал, що подається на вхід автопілоту для автоматичного витримування літального апарата на лінії заданого шляху.
Робота доплерівських вимірювачів швидкості та кута зносу (ДВШЗ) базується на вимірюванні доплерівських частот сигналів, відбитих від земної поверхні, що прийняті по декількох променях антени. Доплерівські вимірювачі виконують важливу роль при визначенні місцеположення літака методом обчислення шляху, тобто розрахунку пройденого шляху за виміряною швидкістю і годиною. При цьому ДВШЗ використовується разом із курсовою системою, що вимірює курс ЛА y, датчиком вертикалі, що формує сигнали крену g і тангажа ϑ, та бортовою ЕОМ, що реалізує алгоритм обчислення шляху. У сукупності вказані пристрої утворюють доплерівську навігаційну систему, у якій ДВШЗ виробляє сигнали, що містять інформацію про шляхову швидкість Vп та кут зносу a ЛА.
Як правило, доплерівські навігаційні вимірювачі ДВШЗ поєднується в системи з автономними нерадіотехнічними вимірювачами швидкості з метою підвищення точності вимірювання швидкості ЛА. Крім того, доплерівські вимірювачі при їх установленні на гелікоптері забезпечують режим його висіння.
При вирішенні завдань автономного управління ЛА на різних етапах його польоту необхідно знаті вектор повної швидкості  ЛА та його складові
ЛА та його складові  в стабілізованій системі координат
в стабілізованій системі координат  , качан якої збігається з місцеположенням центру мас ЛА, а віссю є продовження радіуса Землі. При цьому площина XZ паралельна земній поверхні.
, качан якої збігається з місцеположенням центру мас ЛА, а віссю є продовження радіуса Землі. При цьому площина XZ паралельна земній поверхні.
За вектором повної швидкості визначається місцеположення ЛА методом обчислення шляху. Автономним датчиком вектора повної швидкості ЛА та його складових є ДВШЗ, який являє собою РЛС, установлену на ЛА, що опромінює земну поверхню і приймає відбиті від неї сигнали. У ДВШЗ можуть застосовуватись як імпульсні, так і безперервні зондуючи сигнали.
Сучасні ДВШЗ працюють, як правило, у безперервному режимі випромінювання. Вимірювання складових вектора повної швидкості у ДВШЗ базується на використанні ефекту Доплера, а вектор повної швидкості визначається шляхом розрахунку v і кутів зносу в горизонтальній a та вертикальній a1 площинах за виміряними значеннями .