 2015-05-30
2015-05-30 992
992ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«ДОНСКОЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ
УНИВЕРСИТЕТ»
(ДГТУ)
Кафедра «Радиоэлектроника»
Руденко Н.В.
ЛЕКЦИЯ № 9
Тема лекции: «Устройства электропривода для бытовой
радиоэлектронной аппаратуры»
по дисциплине «электропитание и элементы
электромеханики»
Ростов-на-Дону
ЛЕКЦИЯ № 9
Тема лекции: «Устройства электропривода для бытовой
Радиоэлектронной аппаратуры»
Учебные вопросы
1. Назначение, структура и элементы автоматизированного электропривода.
2. Классификация электроприводов.
3. Регулирование скорости электропривода и режимы его работы.
4. Общие принципы построения систем управления электроприводов.
Литература
1. Немцов М.В. Электротехника и электроника: Учебник для вузов. – М.: Высш. шк. 2007, с.511 – 521.
Назначение, структура и элементы автоматизированного
электропривода
Электропривод (ЭП) —электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенных для приведения в движение исполнительных органов рабочей машины и управления этим движением.
Типовая структурная схема автоматизированного ЭП представлена на рисунке 9.1, где обозначено:
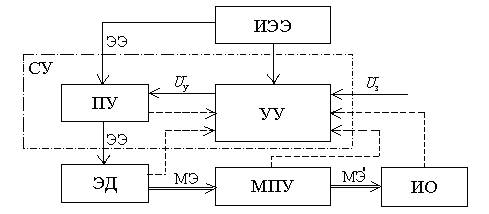
Рисунок 9.1 – Типовая структурная схема автоматизированного ЭП
ИЭЭ – источник электроэнергии (сеть электроснабжения);
ЭД – электродвигатель, основа любого ЭП, обеспечивает преобразование электроэнергии (ЭЭ) в механическую энергию (МЭ);
ИО – исполнительный орган рабочих машин и механизмов (лента транспортера, конвейера, шпиндель токарного станка, крыльчатка насоса, кабина лифта, антенна радиостанции и др.); ИО принимает от ЭД механическую энергию и при необходимости регулирует её в соответствии с технологическими требованиями к режимам работы ИО;
МПУ – механическое передаточное устройство обеспечивает изменение параметров вырабатываемой ЭД механической энергии и служит для согласования движений ЭД и ИО рабочей машины;
ПУ – преобразовательное устройство предназначено для преобразования и регулирования параметров электроэнергии, поступающей от ИЭЭ к ЭД для управления механическим движением ИО;
УУ – управляющее устройство предназначено для управления процессом преобразования энергии, вырабатывает управляющий сигнал U у в функции задающего сигнала U 3 (сигнала уставки) и сигналов обратной связи (на рисунке они показаны пунктиром), содержащих информацию о процессе преобразования энергии, реальных параметрах механического движения ЭД или ИО (эти сигналы вырабатываются соответствующими датчиками). УУ обеспечивает заданный режим работы ЭП, выполняет автоматический пуск, реверсирование, торможение, регулирование и стабилизацию частоты вращения и т.д.
ПУ и УУ образуют систему управления, которая вместе с обмотками двигателя составляет электрическую часть ЭП. Движущаяся часть ЭД (ротор), МПУ и ИО образуют механическую часть ЭП.
Примеры элементов электроприводов:
ИЭЭ – однофазная или трехфазная сеть переменного тока промышленной частоты, аккумуляторная батарея, дизель-генераторная установка, солнечная батарея.
ЭД – двигатель постоянного тока с разными видами возбуждения, асинхронный двигатель с фазным или короткозамкнутым ротором, синхронный двигатель, гистерезисный двигатель, линейные двигатели постоянного или переменного тока, вентильный двигатель, шаговый двигатель и др.
ИО – шпиндель токарного станка, лента конвейера, ковш экскаватора, кабина подъёмника, крыльчатка насоса или вентилятора, крюк подъёмной лебёдки и др.
МПУ – цилиндрические и червячные редукторы, планетарная передача, кривошипно-шатунная передача, цепная и ременная передачи и др.
ПУ – управляемый выпрямитель, преобразователи частоты, напряжения переменного тока, импульсные преобразователи напряжения, инверторы.
УУ – различная релейно-коммутационная аппаратура, усилители, ре-гуляторы, логические элементы, управляющая вычислительная машина.
Функции автоматизированного электропривода:
1. Подведение к ИО механической энергии, за счёт которой совершается их движение. Характер этого движения может быть разнообразным:
- вращательным однонаправленным (насос, вентилятор);
- вращательным реверсивным (станки);
- поступательным однонаправленным (лента транспортера) и реверсивным (подъёмные механизмы);
- возвратно-поступательным (прессы);
- движение в нескольких плоскостях (антенна радиостанции, “руки” робота и манипулятора).
2. Регулирование скорости движения, а также поддержание с заданной точностью скорости движения ИО.
3. Функции по автоматизации технологических процессов:
- обеспечение защит, блокировок, сигнализации;
- автоматического пуска, выхода на различные режимы и останова.








