 2015-06-05
2015-06-05 2301
2301Принцип Даламбера связан с понятием силы инерции. Даламберовой силой инерции материальной точки называется вектор Ф, равный произведению массы т точки на ее ускорение 5 и направленный в сторону, противоположную ускорению точки: \Ф=-та\ (рис. 4.2).
В частности, при криволинейном неравномерном движении точки
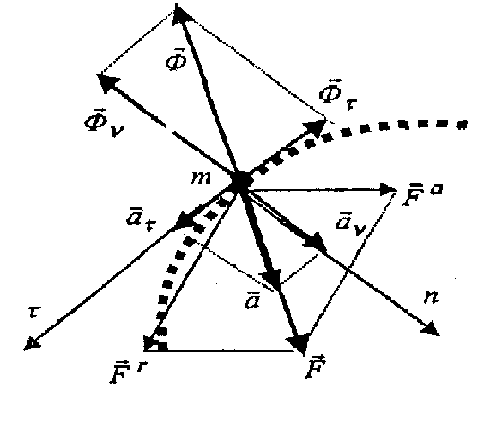
Рисунок 4.2
Если к геометрической сумме F (рис. 4.2) всех, активных сил F" и, для несвободной точки, реакций связей F'' добавить даламберову силу инерции Ф, получится уравновешенная система сил: F + Ф = 0 или
^а +Fr +Ф=0
В этом и заключается принцип Даламбера для материальной точки: в каждый данный момент времени при движении материальной точки геометрическая сумма всех активных сил, реакций связей и силы инерции материальной точки равна нулю. Серьезное преимущество принципа Даламбера при решении задач динамики точки состоит в том, что уравнения движения точки составляются в форме уравнений равновесия. решении задачи другими методами.
Принцип относительности классической механики
Если точка не движется в подвижной системе координат (нет относительного движения), то относительная скорость точки v, = Q, относительное ускорение а^ =0, ускорение Кориолиса 3^=0, кориолисова сила инерции Ф^ = 0, и основное уравнение динамики относительного движения имеет вид: F+Фд=О. Это векторное равенство представляет собой уравнение относительного равновесия материальной точки. Его смысл состоит в том, что относительное равновесие материальной точки исследуется так же, как равновесие абсолютное (F = 0), только к активным силам и реакциям связей добавляется переносная сила инерции d>g материальной точки.
Если переносное движение является поступательным, равномерным и прямолинейным, то кориолисова сила инерции Ф^ = 0, переносная сила инерции <2>е = 0, в этом случае основное уравнение динамики относительного движения m-a^=F и абсолютного движения m-d^=F одинаковы (инвариантны). Этот результат представляет собой принцип относительности классической механики (принцип Галилея-Ньютона): никакими механическим опытами нельзя обнаружить, находится ли данная система отсчета в покое или же совершает поступательное, равномерное и прямолинейное движение.. Принцип Даламбера для механической системы
Принцип Даламбера для механической системы. В каждый данный момент времени при движений механической системы геометрическая сумма всех активных сил. реакций связей и главного вектора сил инерции равна нулю:
{F0 +F7' +Ф* = О
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ Возможные перемещения механической системы. Возможными (или виртуальными) перемещениями называются воображаемые бесконечно малые перемещения механической системы, допускаемые в данный момент времени наложенными на систему внешними и внутренними связями.
В отличие от действительных бесконечно малых перемещений, обозначаемых символом дифференциала а (например, dr, ds, dx\ возможные перемещения обозначаются символом вариации S (Sr,6S,Sx), хотя математически вариации Sr.SS.Sx и дифференциалы dr,aS,dx перемещений определяются одинаково. Действительное перемещение or какой-либо точки механической системы всегда одно, возможных перемещений Sr у нее может быть больше, чем одно, в том числе - бесчисленное множество. В случае стационарных связей (то есть связей, свойства которых не зависят от времени, действительное перемещение or точки есть одно из ее возможных перемещений Sr.
Например, для кривошипно-шатунного механизма возможными перемещениями точки В (ползуна) являются два бесконечно малых перемещения (SSg вдоль горизонтальной направляющей - в одну или другую сторону. Действительное бесконечно малое перемещение dSg - одно из них. Поскольку возможные перемещения являются бесконечно малыми, то криволинейные перемещения точек (например, точки А кривошипа ОА) по дуге окружности можно заменить прямолинейными перемещениями по касательной к траектории точки: (аа')=а.
Возможные перемещения системы ограничены наложенными на нее связями, поэтому для определения положения точек системы нет необходимости знать координаты всех точек. Например, положение всех звеньев и точек кривошипно-шатунного механизма вполне определяется заданием только одного угла у поворота кривошипа. Координаты всех точек этого механизма могут быть выражены в функции от одной независимой переменной — угла <р. Механическую систему, положение которой однозначно определяется заданием одним геометрическим параметром (линейной или угловой координатой), называют системой с одной степенью свободы.
Для определения положения точки в пространстве надо задать не одну, а три координаты - например, x,y,z в прямоугольной декартовой системе координат. Независимые геометрические параметры (как правило, линейные и угловые координаты), заданием которых однозначно определяется положение механической системы, называются обобщенными координатами механической системы. Число обобщенных координат называется числом степеней свободы механической системы. Число независимых между собой возможных перемещений равно числу степеней свободы механической системы.

