 2015-06-05
2015-06-05 3440
3440Тема: Уравнения движения механизмов. Приведение сил и масс в плоских механизмах. Приведенный момент инерции. Приведенная масса. Вывод уравнения для приведенной массы. Звено приведения. Основные формы уравнений движения. Интегрирование уравнений движения.
Характеристики сил, действующих на звенья механизмов. Для кинематического и для силового анализов надо знать законы движения начальных звеньев, т. е. зависимости обобщенных координат от времени. Эти зависимости находятся из решения обратной, или второй, задачи динамики: по заданным силам определить движение.
Силы, действующие на звенья механизма, могут быть функциями времени. Например, сила сопротивления, действующая на лопасть, механизма перемешивающего аппарата, изменяется во времени соответственно изменению свойств перемешиваемой среды; движущая! сила, действующая на входное звено гидравлической муфты, зависит от времени истечения жидкости через постоянное отверстие.
Чаще, однако, переменные силы, действующие на звенья механизма, связаны или с перемещениями, или со скоростями точек приложения этих сил. Например, сила пружины связана с ее деформацией, т. е. с перемещением точки приложения силы; сила взаимодействия проводника с током и магнитного поля в электродвигателе связана со скоростью движения проводника относительно поля и т. д.
Функциональная зависимость, связывающая величину силы и кинематические параметры (время, координаты и скорость точки приложения силы), называется характеристикой силы. Величина силы в этой зависимости может быть и функцией, и аргументом. Однако для удобства расчетов будем всегда считать, что величина силы есть функция указанных кинематических параметров. При решении задач динамического анализа механизмов характеристики сил считаются заданными.
Уравнение движения механизма в форме интеграла энергии (уравнение кинетической энергии). Для определения законов движения начальных звеньев по заданным силам, действующим на звенья механизма, используются уравнения, называемые уравнениями движения механизма. Число этих уравнений равно числу степеней свободы механизма.
Уравнения движения механизма могут быть представлены в различных формах. Для механизмов с одной степенью свободы одна из наиболее простых форм получается на основании теоремы об изменении кинетической энергии. В интегральной форме уравнение движения механизма имеет вид
 (13.1)
(13.1)
где
п — число подвижных звеньев механизма;
Аi — работа внешних (по отношению к механизму) сил, действующих на звено i на конечном перемещении за рассматриваемый промежуток времени;
Ti — кинетическая энергия звена i в конце рассматриваемого промежутка времени;
Тi0 — кинетическая энергия звена i в начале этого промежутка времени.
Уравнение (10.1) можно получить также из дифференциальных уравнений движения звеньев механизма путем их интегрирования. На этом основании уравнение (13.1) называют уравнением движения механизма в форме интеграла энергии.
Приведение сил и масс в плоских механизмах. Уравнение (13.1) представляется довольно громоздким даже для плоских механизмов с небольшим числом звеньев вследствие необходимости производить суммирование по п звеньям. Для механизмов с одной степенью свободы можно получить более простую запись этого уравнения, при которой все операции суммирования по п звеньям выполняются заранее. С этой целью заменим уравнение движения механизма (13.1) тождественным ему уравнением движения одного звена (или одной точки звена), которое движется так, что его обобщенная координата совпадает в любой момент времени с обобщенной координатой механизма.
Пусть, например, начальное звено механизма совершает вращательное движение. Тогда уравнение движения механизма (13.1) можно заменить тождественным ему уравнением движения одного вращающегося звена, называемого звеном приведения (рис. 13.1 а). Момент инерции этого звена относительно оси вращения обозначим через IП и назовем приведенным моментом инерции. Примем также, что на звено приведения действует пара сил с моментом МП,который называется приведенным моментом сил. Полученная расчетная схема называется одномассовой динамической моделью механизма.
Рисунок 13.1. 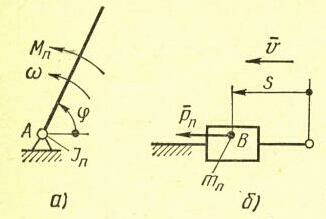 |
Покажем, что всегда можно определить такие величины IП и МП, при которых уравнение движения звена приведения окажется тождественным уравнению движения механизма и, следовательно, обобщенная координата звена приведения будет совпадать с обобщенной координатой механизма в любой момент времени. Напишем уравнение движения звена приведения
конечного промежутка времени, за который обобщенная координата изменяется от j0 до j, а приведенный момент инерции (в общем случае величина переменная) от IП до IП0
 (13.2)
(13.2)
где w — угловая скорость звена приведения, которая по условию должна совпадать с угловой скоростью начального звена;
w0 — значение угловой скорости при j = j0.
Для того чтобы уравнения (10.1) и (10.2) были тождественными, необходимо и достаточно выполнение двух условий:
 (13.3)
(13.3)
 (13.4)
(13.4)
причем если удовлетворяется уравнение (10.4), справедливое для любого момента времени, то удовлетворяется и уравнение
 (13.5)
(13.5)
Из уравнения (13.3) можно найти приведенный момент силы МП,а из (13.4) — приведенный момент инерции IП.
Приведенным моментом сил называется момент пары сил, условно приложенной к звену приведения и определяемой из равенства элементарной работы этой пары сил сумме элементарных работ сил и пар сил, действующих на звенья механизма. Равенство элементарных работ сил при стационарных геометрических связях одновременно означает равенство их мощностей:
МП w =  (13.6)
(13.6)
где
Ni – мощность сил и пар сил, приложенных к звену i.
Пусть на звено i действуют сила  ,для которой скорость точки ее приложения равна
,для которой скорость точки ее приложения равна  , и пара сил с моментом Мi,который считаем положительным, если его направление совпадает с направлением угловой скорости звена wi, и отрицательным, если эти направления противоположные. Тогда из соотношения (13.5) получаем формулу для вычисления приведенного момента сил:
, и пара сил с моментом Мi,который считаем положительным, если его направление совпадает с направлением угловой скорости звена wi, и отрицательным, если эти направления противоположные. Тогда из соотношения (13.5) получаем формулу для вычисления приведенного момента сил:
 (13.7)
(13.7)
Указанная сумма может быть и положительной, и отрицательной. Знак минус указывает, что момент МП направлен противоположно угловой скорости звена приведения. Приведенный момент сил, определяемый по формуле (13.7), можно рассматривать так же, как скалярную величину, совпадающую с обобщенной силой по Лагранжу.
Обобщенной силой по Лагранжу называется скалярная величина, равная отношению суммы возможных работ сил, приложенных к механической системе при изменении только одной обобщенной координаты, к вариации этой координаты.
Иногда отдельно приводят силы движущие, силы сопротивления, силы трения, силы тяжести, силы, действующие на какое-либо звено, и т. п. Формула (13.7) остается справедливой во всех случаях. Надо только указывать, какие силы были выбраны за приводимые.
Из уравнения (13.4) следует, что приведенный момент инерции можно определить как момент инерции, которым должно обладать звено приведения относительно оси его вращения, чтобы кинетическая энергия этого звена равнялась сумме кинетических энергий всех звеньев механизма.
При плоском движении кинетическая энергия звена определяется по формуле
Ti = 0.5(miu2si + Isi wi2) (13.8)
где
тi — масса звена i;
usi — величина скорости центра масс звена i;
wi — угловая скорость звена i;
Isi — момент инерции звена i относительно оси, проходящей через центр масс перпендикулярно плоскости движения. Подставляя это значение Тi в уравнение (13.4) и производя преобразования, получаем
 (13.9)
(13.9)
Если начальное звено совершает прямолинейно-поступательное движение, то динамическая модель механизма представляет собой материальную точку с массой тП (приведенной массой), которая движется под действием силы РП, называемой приведенной силой, так, что обобщенная координата s этой точки совпадает с обобщенной координатой механизма в любой момент времени (рис. 13.1, б). Формулы для определения приведенной силы и приведенной массы имеют вид, аналогичный формулам (13.6) и (13.8):
 (13.10)
(13.10)
 (13.11)
(13.11)
Где u — величина скорости прямолинейно движущегося начального звена.
В общем случае для построения динамической модели механизма за точку приведения, т. е. точку, в которой сосредоточивается приведенная масса, можно выбрать любую точку механизма. Тогда приведенной массой механизма называют массу, которую надо сосредоточить в данной точке механизма (точке приведения), чтобы кинетическая энергия этой материальной точки равнялась сумме кинетических энергий всех звеньев механизма. Соответственно приведенной силой называют силу, условно приложенную к точке приведения и определяемую из равенства элементарной работы этой силы сумме элементарных работ сил и пар сил, действующих, на звенья механизма.
Приведенная сила и приведенная масса (соответственно приведенный момент сил и приведенный момент инерции) не зависят от величины скорости точки приведения v, так как в формулы (13.10) и (13.11) входят только отношения скоростей, которые не изменяются с изменением u. Если u изменяется в k раз, то во столько же раз изменяются величины ui, usi и wi. Отсюда следует, что определение приведенных сил и масс можно выполнить, не зная еще скорости точки приведения, т. е. до решения уравнения движения. В этом заключается основное достоинство приведения сил и масс. К этому заключению можно прийти также, обратив внимание на то, что в формулы (13.6), (13.9) и (13.10), (13.11) кроме заданных постоянных величин входят только аналоги скоростей, которые не зависят от времени.
Приведенная масса может быть переменной величиной, если отношения скоростей, входящие в формулу (10.11), являются переменными величинами, зависящими от положения звеньев. Однако точку приведения с переменной приведенной массой нельзя рассматривать как модель тела переменной массы. Изменение приведенной массы отражает лишь изменение кинетической энергии звеньев механизма с постоянными массами.
Определение приведенных сил и пар сил по теореме Жуковского. Мощность приведенной силы  равна сумме мощностей сил и пар сил, приложенных к звеньям механизма. На основании теоремы Жуковского это условие равносильно равенству
равна сумме мощностей сил и пар сил, приложенных к звеньям механизма. На основании теоремы Жуковского это условие равносильно равенству
 (13.12)
(13.12)
Где rП и ri — плечи относительно полюса повернутого на 90° плана скоростей приведенной силы и силы  , действующей на звено i;
, действующей на звено i;
 — составляющая пары сил, действующей на звено i;
— составляющая пары сил, действующей на звено i;
 — плечо этой пары на повернутом плане скоростей.
— плечо этой пары на повернутом плане скоростей.
Из уравнения (13.12) определяется величина приведенной силы, а направление получается из условия, что на повернутом плане скоростей момент приведенной силы совпадает по направлению с суммарным моментом приводимых сил и пар сил.
Для определения момента приведенной пары сил МП представляем эту пару в виде двух составляющих  , одна из которых приложена в центре вращения начального звена А, а другая — в точке В, отстоящей от центра А на расстоянии lАВ. Составляющие
, одна из которых приложена в центре вращения начального звена А, а другая — в точке В, отстоящей от центра А на расстоянии lАВ. Составляющие  пары сил направляем перпендикулярно отрезку АВ. Определив составляющую приложенную в точке В, аналогично указанному выше определению приведенной силы находим искомую величину приведенного момента сил из условия
пары сил направляем перпендикулярно отрезку АВ. Определив составляющую приложенную в точке В, аналогично указанному выше определению приведенной силы находим искомую величину приведенного момента сил из условия
МП =  lАВ (13.13)
lАВ (13.13)
Кинетическая энергия пространственного механизма. Приведение сил и масс целесообразно выполнять при динамическом анализе не только плоских, но и пространственных механизмов. Для определения приведенной массы надо знать выражение кинетической энергии звена, совершающего пространственное движение.
Свяжем со звеном i центральную систему координат хi уi zi, т. е. систему с началом координат в центре масс Si, и обозначим через  ,
,  ,
,  моменты инерции звена относительно координатных осей, а через
моменты инерции звена относительно координатных осей, а через  ,
,  ,
,  — центробежные моменты инерции. Кроме того, считаем известными скорость центра масс звена
— центробежные моменты инерции. Кроме того, считаем известными скорость центра масс звена  и проекции мгновенной угловой скорости при сферическом движении звена относительно центра масс на указанные координатные оси:
и проекции мгновенной угловой скорости при сферическом движении звена относительно центра масс на указанные координатные оси:  ,
,  ,
,  .
.
Тогда кинетическая энергия звена i будет равна сумме кинетической энергии в поступательном движении по траектории центра масс со скоростью  и кинетической энергии при сферическом движении вокруг центра масс:
и кинетической энергии при сферическом движении вокруг центра масс:
 (13.14)
(13.14)
Координатные оси хi уi zi всегда могут быть выбраны так, что все центробежные моменты инерции обратятся в нуль. Координатные оси, удовлетворяющие этому условию, называются главными осями инерции. В дальнейшем всегда считаем, что оси координат, связанные со звеньями, являются главными центральными осями инерции.
Дифференциальное уравнение движения механизма. Кроме уравнения движения механизма в форме интеграла энергии в некоторых случаях удобно применить уравнение движения механизма, представленное в форме дифференциального уравнения второго порядка. Это уравнение можно получить из уравнения кинетической энергии в дифференциальной форме dА=dТ.
При вращающемся начальном звене после приведения сил и масс получаем
МП dj =d (IП w2/2) или 
Отсюда:
 (13.15)
(13.15)
где
e — угловое ускорение начального звена.
Уравнение (12.14) можно получить также из уравнения Лагранжа 2-го рода, которое после приведения сил и масс имеет вид:
 , где Т= IП w2/2
, где Т= IП w2/2
После дифференцирования получаем:
 ;
;  ;
;  ; (13.16)
; (13.16)
Подставляя значения производных в уравнение Лагранжа, вновь получаем уравнение (13.15).
Аналогичный вид имеет дифференциальное уравнение движения механизма при прямолинейно движущемся начальном звене.
Литература: /I/ гл.19 §88, §89 /2/ гл.2 лекция 8.
Вопросы для проверки:
- Что называют приведенной массой?
- Дайте определение приведенного момента инерции.
- Как выглядит выражение для приведенной массы?
- Какое из звеньев механизма выбирают звеном приведения?
- В какой форме может быть написано уравнение движения?

