 2015-06-28
2015-06-28 1099
1099Обґрунтування технічного рішення та вибір тягового електричного двигуна для електропривода синергетичного автомобіля. Стосовно розробленої концепції недорогого синергетичного автомобіля, сформулюємо ряд вимог до тягового електроприводу синергетичного автомобіля:
- система електричного привода повинна коштувати менш, ніж закордонні аналоги. Цій вимозі сприяє те, що він повинен бути достатньо невеликої потужності;
- для здешевлення тягової акумуляторної батареї і блоку інвертора бажано, щоб тяговий двигун був порівняно низьковольтним;
-тяговий електричний двигун повинен бути високомоментним, а тому багатополюсним. Багатополюсність робить його низькооборотним, що усугубляється не дуже високою напругою живлення. Рішення цієї проблеми може бути вирішено двохзоновим регулюванням швидкості електричного двигуна;
- оскільки у тягового електродвигуна є кінематичний зв'язок з колесами, то при русі автомобіля важливо мати електропривод з мінімальним опором обертанню у відключеному стані, що зменшить втрати при русі на ДВЗ.
Таким чином, визначимось, що для створення синергетичного електроприводу автомобіля будемо використовувати:
- недорогий тяговий електричний двигун змінного струму;
- недорогу тягову акумуляторну батарею;
- систему керування електропривода власної розробки;
- систему заряду АКБ від генераторної установки автомобіля та електричної мережі 220 В 50 Гц власної розробки.
Не повною мірою підходящим для даного синергетичного автомобіля є вживаний в сучасних гібридних автомобілях вентильний двигун з постійними магнітами на роторі машини, оскільки він малодоступний, дорогий, і не допускає двохзонове регулювання. А конструкція самої гібридної силової установка є дуже складною з технічної точки зору (рис. 17).
 |
Крім того, такий вентильний двигун характеризується порівняно високим опором обертанню у відключеному стані через перемагнічування феромагнітного сердечника статора в полі постійних магнітів ротора [20].
Для такого синергетичного автомобіля можна застосовувати асинхронні двигуни з частотним керуванням і вентильно-індукторні двигуни із зубчатим феромагнітним ротором, що мають мінімальні втрати на обертання у відключеному стані. Але асинхронні двигуни при малій потужності мають низький пусковий момент, а вентильно-індукторні двигуни для електромобіля поки знаходяться у стадії розробки.
Для створення електроприводу, який добре задовольняє поставленим вимогам, на нашу думку, підходить автомобільна трифазна синхронна електрична машина змінного струму з електромагнітним збудженням (рис. 18) доповнена необхідними датчиками і електронними блоками керування для роботи в режимі вентильного двигуна.
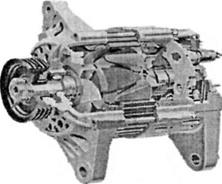
Рис. 18. Трифазна синхронна електрична машина
На кафедрі Автомобільної електроніки ХНАДУ було ухвалено рішення розробити відповідну електронну систему керування тяговим електричним двигуном у складі синергетичної установки автомобіля і провести дослідження електричних двигунів на основі недорогих автомобільних синхронних трифазних генераторів змінного струму напругою 12 В або 24 В, що серійно випускаються та використовуються в автобусах та на вантажних автомобілях.
При виборі тягового електричного двигуна для синергетичного автомобіля бралися до уваги наступні переваги застосовування автомобільних генераторів:
- істотне здешевлення електропривода, завдяки використанню готової конструкції з відносно невисокою ціною;
- можливість зменшення опору обертанню вентильного двигуна, який не працює, шляхом відключення обмотки збудження (при русі синергетичного автомобіля тільки за рахунок ДВЗ);
- керування швидкістю обертання в широкому діапазоні при порівняно низький напрузі живлення, яке забезпечується можливістю двохзонового регулювання;
- достатньо простий метод рекуперації енергії при гальмуванні автомобіля, оскільки можна регулювати гальмівне зусилля порівняно невеликим струмом обмотки збудження.
Слід зазначити також недоліки вентильного двигуна створеного на основі автомобільного синхронного електричного генератора, який використовується в синергетичному автомобілі:
- витрата електроенергії на живлення обмотки збудження, що приводить до невеликого зниження ККД (на декілька відсотків);
- наявність щіткового вузла;
- деякий нагрів ротора.
Перший недолік неусувний, але він зменшується при використанні більш потужних електричних машин. Другий недолік є неістотним, тому як щітки передають малий струм без якої-небудь комутації, вносять дуже малий опір обертанню і, як показує досвід експлуатації автомобільних генераторів, служать тривалий час без обслуговування. Нагрів ротора також не створює помітних проблем, оскільки потужність, що витрачається на збудження порівняно мала.
Для електропривода синергетичного автомобіля обрані для експериментального порівняння дві трифазних синхронних електричних машини на базі генераторів Г287 і Г290.
Експериментальні дослідження тягового електричного двигуна. Для проведення експериментальних досліджень був обраний генератор моделі 29.3701, який має в генераторному режимі робочу напругу 14 В і струм 50 А. Генератор був допрацьований таким чином: трифазний діодний міст  був видалений, а клеми фаз обмотки статора, сполученої в «зірку», забезпечені гнучкими виводами. Під шківом на верхній кришці генератора була укріплена панель з оптичними датчиками положення ротора (ДПР), а на шківі - диск, забезпечений напівперіодичними шторками. Датчики кріпляться до панелі через додаткове кільце для забезпечення можливості регулювання кута комутації.
був видалений, а клеми фаз обмотки статора, сполученої в «зірку», забезпечені гнучкими виводами. Під шківом на верхній кришці генератора була укріплена панель з оптичними датчиками положення ротора (ДПР), а на шківі - диск, забезпечений напівперіодичними шторками. Датчики кріпляться до панелі через додаткове кільце для забезпечення можливості регулювання кута комутації.
Оскільки визначити необхідну робочу напругу планувалося в результаті експерименту, в якості електронних ключів були застосовані IGBT транзистори з великим запасом по напрузі (до 600 В).
Рівняння механічної характеристики такого двигуна має вигляд
 , (1)
, (1)
де  - частота обертання;
- частота обертання;
U - напруга живлення якоря (статора);
М - електромагнітний момент;
Ф - магнітний поток ротора;
R - активний опір обмоток якоря;
k - конструктивний параметр двигуна. Функція (М) - це прямі лінії, залежні для даного двигуна від U і від Ф, тобто від напруги живлення якоря (обмоток статорів) і струму збудження (в обмотці ротора), а також конструкції двигуна. Для визначення цих залежностей, внаслідок відсутності інформації про конструктивні параметри, проведені експериментальні дослідження. Було ухвалено рішення для датчиків блоку управління встановити нейтральну комутацію (Р=0), оскільки це забезпечує найбільший пусковий момент і достатньо високий ККД на різних режимах навантажень [2].
Установка нейтральної комутації проводилася по симетрії форми фазної напруги, а також по мінімуму струму на холостому ходу (XX). Додатковим критерієм була симетрія параметрів для прямого і зворотного напрямку обертання.
Потім була знята залежність оборотів холостого ходу від струму збудження. Оскільки в (4.1) магнітний потік ротора пропорційний току збудження в знаменнику, залежність має падаючий вигляд. Ця залежність має нелінійну початкову ділянку, обумовлену наявністю вбудованого вентилятора, що збільшує навантаження при збільшенні оборотів, а також іншими механічними втратами. Залежність має характерну область насичення при великих струмах.
З цієї кривої, а також враховуючи, що генератор призначений для тривалої роботи з напругою 14 В, були обрані наступні режими його роботи:
- номінальний струм збудження 2,5 А (приблизно відповідний напрузі 14 В на обмотці збудження);
- форсований струм збудження 5 А (короткочасний режим). Необхідний струм збудження підтримується блоком управління збудженням, який за допомогою Ш1М забезпечує необхідний стабільний струм користуючись енергією тягової батареї.
У режимі холостого ходу були зняті характеристики регулювання. У першій зоні знята залежність оборотів від напруги якоря. Оскільки регулювання напруги проводилася за допомогою ІШМ, то відповідно отримана залежність U (кш), де кш - коефіцієнт передачі НИМ.
Таким чином підтверджена можливість регулювання в першій зоні оборотів (від 0 до оборотів XX при номінальному струмі збудження 2,5 А). Нехтуючи внутрішнім опором Ш1М, отримаємо еквівалентну напругу живлення кола якоря
U = kшUBX, (4.2)
де кш - коефіцієнт передачі ШІМ; UBX - вхідна напруга.
В лінійній залежності (М), згідно рівнянню (4.1), коефіцієнт при М залишається постійним, тому нахил механічних характеристик залишається незмінним, отже, при регулюванні жорсткість характеристики залишається постійною.
Короткочасно потужність можна підвищити або збільшенням напруги живлення, або форсуванням струму збудження.
Для однієї з точок на механічній характеристиці двигуна за допомогою експериментальних даних Для струму і напруги визначена споживана потужність, а також розрахована для цієї точки відповідна механічна потужність. Для випробовуваного електричного двигуна в даній точці - розрахований ККД без урахування втрат на збудження, який склав 81 %. З урахуванням втрат на збудження (при 2,5 А і 12 В) ККД склав 78,4 %.
В результаті виконання експериментальних досліджень можна зробити висновки:
- вентильний двигун з електромагнітним збудженням, також як і вентильний двигун з постійними магнітами, має потужність в режимі двигуна приблизно в 2... 2,5 рази більшу, ніж в генераторному режимі, що відповідає теоретичним даним [1];
- на базі генератора з напругою 14 В вентильний двигун забезпечує номінальну потужність при живленні від джерела з напругою близько 48 В. Відповідно для вентильного двигуна на базі генератора на 28 В потрібна напруга близько 96 В;
- отримані порівняно низькі значення напруги живлення дозволяють використовувати як ключі для трифазного моста польові MOSFET транзистори, що в порівнянні з IGBT транзисторами понизить вартість блоку інвертування і зменшить падіння напруги на ключах та підвищить ККД.
Оскільки для приводу синергетичного автомобіля необхідний більш потужний вентильний електричний двигун був обраний синхронний генератор Г290 потужністю 4,2 кВт в генераторному режимі. На базі такої синхронної електричної машини можливо створення вентильного двигуна потужністю 7... 15 кВт. Це дозволить створити недорогий і технологічний електропривод згідно вищеописаної концепції.
Для проведення експериментальних досліджень вентильних електричних двигунів, які можна застосовувати в якості електропривода синергетичного автомобіля, був розроблений і побудований гальмівний випробувальний стенд. На рис. 4.20 показані експериментальні дослідження тягового вентильного електричного двигуна гібридного автомобіля Toyota Prius на гальмівному випробувальному стенді.
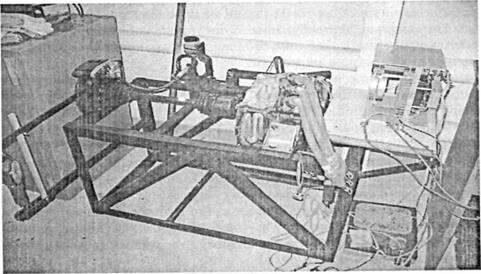
Рис.20. Гальмівний випробувальний стенд
Стенд складається з рами звареної з металевого профілю, укріпленого на рамі гальмівного дискового механізму від автомобіля ВАЗ 2108 і шарніра рівних кутових швидкостей від цього ж автомобіля. Крім того, на рамі передбачені елементи кріплення випробуваного двигуна, а на валу шарніра рівних кутових швидкостей елементи стикування з валом електричного двигуна.
Регулювання гальмівного зусилля проводилася за допомогою гідравлічної системи, що складається з головного циліндра зчеплення автомобіля ВАЗ 2107 з'єднаного гальмівним шлангом з робочим циліндром скоби гальмового механізму. Привід штока головного циліндра здійснювався за допомогою важеля (важіль ручного гальма автомобіля ВАЗ 2108).
Обертаючий момент випробовуваного двигуна визначався за допомогою динамометра, що вимірює силу між важелем, прикріпленим до обертається скобі гальмівного механізму і привареному до рами затятим важелем. Оскільки в досліджуваних вентильних двигунах встановлені датчики положення ротора, сигнал з яких несе інформацію про обороти (кутовій швидкості), окремих датчиків оборотів на стенді не передбачено.
Порівняльні випробування були проведені для трьох типів вентильних двигунів, виготовлених на основі наступних синхронних електричних машин:
- синхронна електрична машина з висококоерцитівними постійними магнітами на роторі (вентильний двигун-генератор від гібридного автомобіля Toyota Prius;
перебудована синхронна електрична машина з електромагнітним збудженням (автомобільний генератор Г287);
перебудована синхронна електрична машина з електромагнітним збудженням (автомобільний генератор Г290).
Всі синхронні електричні машини були забезпечені полуперіодичними датчиками положення ротора. Статорні трифазні обмотки з'єднані в «зірку», а роторні обмотки збудження машин з електромагнітним збудженням отримують живлення від джерела номінальної постійної напруги:
Статорні обмотки отримують живлення від модуля силовий комутації (інвертора) зібраного із застосуванням інтелектуального силового модуля PM300CVA060 компанії Mitsubishi electric, управління яким здійснюється контролером. Контролер обробляє сигнали датчиків положення ротора, датчиків струму фаз двигуна, датчика установки напруги живлення (датчика положення дросельної заслінки) і перемикача напрямку обертання.
Оскільки двигуни за умовами експлуатації повинні мати максимальний момент при нульовій кутовій швидкості, а також працювати в реверсному режимі, необхідно було встановити нейтральну комутацію в системі управління. Для цього установочний кут датчиків положення ротора знаходився за наступною методикою.
При першій установці кута комутації визначалися обороги холостого ходу при прямому і реверсному напрямках обертання. Напруга живлення підтримувалося постійної. Від отриманих значень знаходилося середнє арифметичне значення і такі оборот холостого ходу встановлювалися па вентильному двигуні шляхом зміни установочного кута комутації. Потім знову перевірялися обороти холостого ходу для прямого і зворотного напрямку обертання і процедура повторювалася до отримання практично однакових оборотів холостого ходу в обох напрямках.
У результаті проведення випробувань отримані експериментальні дані, які зведені у табл. 5.
Таблиця 5
Експериментальні випробування вентильних двигунів
| Електрична машина | Напруга, В | Частота XX, об/хв. | Струм під навантаженням, А | Потужність електрична. кВт | Потужність механічна, кВт | ККД, % |
| Двигун автомобіля Toyota Prius | 62,5 | 7.5 | 6,7 | |||
| Г287 | 7.2 | 4,5 | ||||
| Г290 | 73,5 | 5,29 | 4,5 |
За результатами випробувань найкращий ККД має вентильний двигун на основі електричної машини від автомобіля Toyota Prius. Але габарити такого двигуна великі і розмістити його під капотом автомобіля Таврія не представлялося можливим. Крім того такий двигун вимагав більш високої напруги тягової акумуляторної батареї, що підвищувало її вартість і вартість зарядного пристрою.
Як видно з наведеної табл. 2 вентильний двигун на основі генератора Г290 при необхідній потужності (4,5 кВт) і прийнятної напрузі має більш високий ККД, а саме 85%. Вентильний двигун на основі генератора Г287 при необхідній потужності (4,5 кВт) має низький ККД, а саме 62%. Пояснюється це тим, що він має менші габарити, ніж генератор Г290 відповідно більш навантажений і тому має великі втрати на активному опорі обмоток статора.
Таким чином, для синергетичного автомобіля обраний вентильний двигун на основі генератора Г290, оскільки в автомобілі він буде найбільш ефективнім та буде менш нагріватися. Короткочасно (наприклад на декілька секунд розгону синергетичного автомобіля на електроприводі) такий вентильний двигун при обраній величині обмеження струму може розвивати потужність 10 кВт.
Розробка системи управління тяговим електроприводом. Система управління силової установки синергетичного автомобіля, крім управління тягово-швидкісними режимами ДВЗ і процесом зарядки/розрядки високовольтної тягової акумуляторної батареї, здійснює управління електроприводом у тяговому і генераторному режимах за допомогою відповідного електронного блоку управління. Ефективність синергетичної силової установки в значній мірі визначається якістю управління електроприводом на різних режимах його функціонування. Розглянемо особливості такого управління в даному дослідженні.
При конверсії базового автомобіля з ДВЗ в гібридний варіант виникає необхідність встановити компактний і досить потужний тяговий електропривод не видаляючи ДВЗ. Застосування широко поширених тягових колекторних електричних двигунів постійного струму дуже проблематично через їх великі габарити. Найменшими габаритами і найбільшим ККД при заданій потужності мають сучасні вентильні електричні двигуни, які застосовують у більшості сучасних гібридних автомобілів.
Вентильний двигун являє собою синхронну електричну машину, забезпечену датчиками положення ротора, яка отримує живлення через інвертор на основі сучасних силових електронних ключів та керовану за оптимальними алгоритмами за допомогою мікроконтролера. Синхронні електричні машини бувають з збудженням від постійних магнітів і з електромагнітним збудженням. Найбільш широко застосовують вентильні двигуни на основі синхронної електричної машини з висококоерцитовні постійними магнітами на роторі. Такі двигуни мають більш високий ККД і кращі електричні характеристики. Однак вони малодоступні і мають високу вартість.
Крім того, недоліком таких вентильних двигунів є малий діапазон швидкостей обертання ротора. Оскільки швидкість ідеального холостого ходу пропорційна напрузі живлення якоря і обернено пропорційна магнітному потоку збудження ротора, для розширення швидкісного діапазону, при неможливості керувати магнітним потоком, погрібне збільшення напруги живлення. Для цієї мети в ряді гібридних автомобілів Toyota Prius, Lexus RX400h та ін. встановлено електронний перетворювач постійної напруги, що підвищує напругу акумуляторної батареї з 200...300 В до 600...700 В. Такий перетворювач обходиться недешево, тому що вимагає високовольтних силових електронних ключів, а також збільшує втрати електричної енергії. Крім того, в трифазний міст блоку управління вентильного двигуна також доводиться ставити більш дорогі високовольтні електронні ключі, що мають більше падіння напруги у відкритому стані.
Відносно недорогими і широко поширеними є синхронні електричні машини з електромагнітним збудженням, оскільки вони застосовуються в якості генераторів змінного струму, у тому числі і в якості автомобільних генераторів. Саме цей тип електричних машин був обраний для виготовлення вентильного двигуна тягового електроприводу конвертованого синергетичного автомобіля. Такі вентильні двигуни на основі синхронної електричної машини з електромагнітним збудженням, крім невисокої вартості, мають низку інших важливих переваг. Серед них:
- можливість організувати регулювання у другій зоні за допомогою керування потоком збудження. При фіксованій напрузі живлення це дозволяє розширити робочий діапазон швидкостей обертання ротора, а значить і збільшити передавальне число від тягового вентильного двигуна до ведучих коліс. В результаті вдається підвищити пусковий обертаючий момент без збільшення запасу потужності електричного двигуна;
- суттєво менший гальмівний момент в знеструмленому стані, що поліпшує накат гібридного автомобіля;
- можливість ефективного управління електричним двигуном в режимі генератора шляхом регулювання струму збудження.
Для реалізації перелічених переваг вентильних двигунів з електромагнітним збудженням потрібні відповідні схемотехнічні та програмні рішення, які ми реалізували як в електронному блоці управління електричного двигуна, так і в системі управління силової установки синергетичного автомобіля в цілому.
Розглянемо більш докладно принцип управління вентильним електричним двигуном у складі електропривода синергетичного автомобіля. В якості тягових двигунів використовують синхронні машини з досить малим міжкомутаційним періодом. Це також відноситься і до обраної нами трифазної схеми з реверсивним живленням. Для таких електричних двигунів може бути використана стандартна модель електроприводу постійного струму при припущенні про нескінченно малому МІЖКО мутаційному періоді, без урахування реакції якоря на магнітний потік збудження та без урахування індуктивності фазних обмоток якоря [4].
У цьому випадку струм живлення вентильного двигуна в статичному режимі, визначається
 (4)
(4)

Де U - напруга живлення якоря (статора);
Е - електрорушійна сила (ЕРС) обертання;
R- сумарний активний опір кола якоря. ЕРС обертання
Е = kФω (5)
Де k - конструктивний параметр двигуна;
Ф - магнітний потік збудження;
ω - швидкість обертання ротора. Електромагнітний момент електричного двигуна
М = kФ І. (6)
При обумовлених припущеннях рівняння механічної характеристики вентильного електричного двигуна має вигляд формули (4.1). З (4.4)...(4.6) видно, що управління електромагнітним моментом електричного двигуна може здійснюватися шляхом відповідної зміни напруги живлення або магнітного потоку збудження. Оскільки у схемі трифазного мосту вже є повністю керовані силові ключі, то для регулювання напруги живлення якоря можна ввести для них широтно-імпульсну модуляцію (ШІМ) зі скваженістю S керуючого сигналу. При цьому достатньо забезпечити ШІМ тільки для нижніх ключів. Частота ШІМ вибирається з умови безперервності струму та частої них властивостей силових ключів. У нашому блоці ця частота обрано рівної 20 кГц.
Максимальна величина струму, який споживає вентильний двигун, обмежується блоком захисту по струму. При цьому запобігається так званий «прямий пуск» електричного двигуна, коли при загальмованому роторі струм обмежується лише активним опором якірного кола і може наростати до неприпустимих значень.
У першій зоні регулювання управління вентильного двигуна здійснюється тільки по обмотці якоря при Ф = const, коли
RI + kФω < Umах, (7)
 де U/max - максимальне значення напруги живлення якоря при скважністі імпульсів ШІМ S 1.
де U/max - максимальне значення напруги живлення якоря при скважністі імпульсів ШІМ S 1.
Кут комутації струму обмотки якоря підтримується близьким
до величини Q=  за допомогою полуперіодичних оптичних датчиків положення ротора Д1...ДЗ (див. рис. 4.18). У найпростішому випадку напруга живлення якоря U
за допомогою полуперіодичних оптичних датчиків положення ротора Д1...ДЗ (див. рис. 4.18). У найпростішому випадку напруга живлення якоря U  [0, U/mах ], яке визначається скважністю імпульсів S [0, 1], пропорційна сигналу а [0, αmах ] датчика положення дросельної заслінки, пов'язаного з педаллю акселератора. У цьому випадку при зменшенні швидкості автомобіля, викликаному збільшенням сили опору руху, зменшується швидкість обертання ротора тягового електричного двигуна, що призводить до зниження ЕРС обертання і, згідно з (4), до збільшення струму I. У свою чергу, збільшення струму викликає збільшення електромагнітного моменту вентильного двигуна, що веде до встановлення рівноваги на більш низькій швидкості. Описане властивість саморегулювання електроприводу підвищує зручність керування автомобілем.
[0, U/mах ], яке визначається скважністю імпульсів S [0, 1], пропорційна сигналу а [0, αmах ] датчика положення дросельної заслінки, пов'язаного з педаллю акселератора. У цьому випадку при зменшенні швидкості автомобіля, викликаному збільшенням сили опору руху, зменшується швидкість обертання ротора тягового електричного двигуна, що призводить до зниження ЕРС обертання і, згідно з (4), до збільшення струму I. У свою чергу, збільшення струму викликає збільшення електромагнітного моменту вентильного двигуна, що веде до встановлення рівноваги на більш низькій швидкості. Описане властивість саморегулювання електроприводу підвищує зручність керування автомобілем.
Разом з тим такий підхід до управління тяговим електричним двигуном пов'язаний з неповним використанням ходу педалі акселератора. Дійсно, при руху з місця і малих швидкостях обертання ротора після невеликого переміщення педалі струм якоря досягає значення I = I max і обмежується блоком струмового захисту. Подальше переміщення педалі акселератора не впливає на тягово-швидкісний режим електроприводів. З іншого боку, при високих швидкостях обертання ротора, початковий діапазон ходу педалі відповідає значенням U<Е = kФω, при яких відсутній тяговий момент електричного двигуна.
Більш кращим виявляється закон регулювання, при якому забезпечується момент обертання вентильного двигуна, пропорційний положенню педалі акселератора
М=f(α) (8)
Враховуючи (6), при Ф = const, такий закон може бути реалізований в мікроконтролері блока управління ключами (БУК) з використанням зворотного зв'язку по струму якоря в разі стабілізації задається величини струму
I= µα (9)
Де I [0, Imях ];
α [0, α mях ]
µ - коефіцієнт пропорційності.
У даному режимі відсутня властивість саморегулювання електроприводу, проте повністю використовується весь хід педалі акселератора на всіх тягово-швидкісних режимах.
Режими роботи вентильного двигуна, яким відповідають негативні значення струму у виразі (4) використовуються для рекуперативного гальмування автомобіля і при зарядці тяговій акумуляторній батареї від приводу працюючого ДВЗ. Сигнал включення рекуперативного гальмування надходить в БУК від системи керування синергетичною силовою установкою гібридного автомобіля при натисканні на педаль гальма.
При досить високих швидкостях обертання ротора вентильного двигуна виникає ситуація, коли RI + kФω = Umax. У цьому випадку скважністі. імпульсів ШІМ-регулятора напруги Якоря S=1. Величина ω' залежить від електромагнітного моменту електричного двигуна. Як випливає з (4.4…4.6), при збільшенні електромагнітного моменту величина ω'зменшується.
У певному діапазоні швидкостей ω'< ω < ω" можливо утримання заданого моменту обертання вентильного двигуна при U = Umax шляхом спеціального управління силовими ключами кіл обмотки якоря. Таке управління повинно забезпечувати зміною кута комутаціїQ' = Q+ΔQ, при якому проекція магніторушійної сили (МДС) обмотки якоря на магнітну вісь ротора спрямована протилежно потоку збудження. Це призводить до ослаблення потоку збудження, зменшення ЕРС обертання і, як випливає з (4), збільшення струму якоря. Після досягнення струмом якоря величини Imах при швидкості ω = ω" підтримку заданого електромагнітного моменту двигуна виявляється неможливим.
При ω > ω" момент швидко зменшується з ростом швидкості обертання ротора. Очевидно, що величина ω" залежить від поточного електромагнітного моменту електричного двигуна. Таке управління двигуном, за допомогою ослаблення потоку збудження магнітним потоком якоря, характерно для вентильних двигунів зі збудженням від постійних магнітів. Воно пов'язане зі зменшенням ККД внаслідок непродуктивного використання МДС якоря.
При використанні вентильних двигунів з електромагнітним збудженням, як це має місце в даному випадку, можливо безпосереднє управління потоком збудження шляхом використання ШІМ у БУК. При швидкостях обертання ротора двигуна ω > ω' = f (М), коли скважність імпульсів ШІМ-регулятора напруги якоря S = 1, скважність імпульсів ШІМ блоку управління збудженням Sv [SVmin, l] задається такою, щоб сигналу α [0, α mях ] датчика положення дросельної заслінки, пов'язаного з педаллю акселератора, відповідав струм якоря I = µα, I [0, I mах ], характерний для першої зони управління. Очевидно, що SVmin = f (I mах, ω). При такому регулюванні електромагнітний момент із зростанням швидкості буде зменшуватися через зменшення потоку збудження. По суті, ми переходимо від стабілізації заданого моменту обертання електричного двигуна в першій зоні управління до стабілізації заданої потужності у другій зоні: Мω = f(а) (10)
З виразів (4.4...4.6) можна отримати, що механічна потужність Р„, на валу електричного двигуна
 10
10
Де Ре - споживана електрична потужність;
Рс - потужність втрат на активному опорі якоря. Таким, враховуючи прийняту ідеалізацію моделі вентильного електричного двигуна, отримаємо вираз для ідеального ККД у вигляді
 11
11
З цього виразу видно, що ККД вентильного двигуна не залежить від магнітного потоку збудження. Отже, прийнятий нами спосіб управління електричним двигуном в другій зоні, шляхом зміни SV = f (α) при S = 1, не зменшує максимально досяжну механічну потужність і не знижує ККД електропривода.
Якщо використовувати модель електричного двигуна, що враховує кінцеву величину міжкомутаційного періоду, то можна отримати залежність ККД від швидкості в обертання ротора у вигляді [5]:
 12
12
 =
=  13
13
Де  - нормована швидкість обертання ротора
- нормована швидкість обертання ротора
 - максимальна швидкість обертання ротора при ідеальному холостому ході;
- максимальна швидкість обертання ротора при ідеальному холостому ході;
 - величина міжкомутаційного періоду.
- величина міжкомутаційного періоду.
На рис. 22 наведена залежність ККД вентильного електричного двигуна від нормованої швидкості обертання ротора  = f (ω0) при фіксованій напрузі якоря U = const і = π/3.
= f (ω0) при фіксованій напрузі якоря U = const і = π/3.
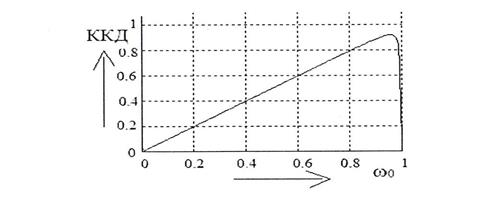
Рис. 22. Залежність ККД вентильного електричного двигуна від нормованої швидкості обертання ротора при фіксованій напрузі якоря
Як видно з графіка, при загальмованому роторі ( =0), ККД двигуна = 0 оскільки вся напруга живлення падає на активному опорі кола якоря. По мірі збільшення швидкості пропорційно зростає ККД, досягає максимуму поблизу оборотів ідеального холостого ходу і потім круто падає до нуля із-за кінцевого значення міжкомутаційного періоду.
=0), ККД двигуна = 0 оскільки вся напруга живлення падає на активному опорі кола якоря. По мірі збільшення швидкості пропорційно зростає ККД, досягає максимуму поблизу оборотів ідеального холостого ходу і потім круто падає до нуля із-за кінцевого значення міжкомутаційного періоду.
Залежність ККД вентильного електричного двигуна, який буде застосовуватися в електроприводі синергетичного автомобіля, від нормованої швидкості обертання ротора =  (ω0) при фіксованому струмі якоря I = const наведена на рис. 23. Саме така залежність отримана авторами при моделюванні та дослідженні вентильного електричного двигуна у складі гібридної силової установки синергетичного автомобіля [6]. У даному випадку ми спостерігаємо збільшення ККД на низьких і середніх швидкостях електричного двигуна за рахунок мінімізації активних втрат в обмотках якоря.
(ω0) при фіксованому струмі якоря I = const наведена на рис. 23. Саме така залежність отримана авторами при моделюванні та дослідженні вентильного електричного двигуна у складі гібридної силової установки синергетичного автомобіля [6]. У даному випадку ми спостерігаємо збільшення ККД на низьких і середніх швидкостях електричного двигуна за рахунок мінімізації активних втрат в обмотках якоря.
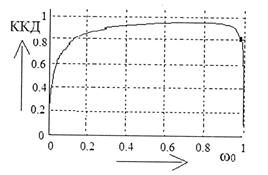
Рис. 23. Залежність ККД вентильного електричного двигуна від нормованої швидкості обертання ротора при фіксованому струмі якоря
Порівняння наведених залежностей дозволяє зробити висновок про те, що при управлінні струмом якоря, пропорційно відхиленню педалі акселератора, вентильний двигун з більшою ймовірністю буде перебувати в області режимів з високим ККД, в порівнянні з випадком управління якоря, водій найбільш ймовірно буде періодично короткочасно натискати і відпускати педаль акселератора, із заходом в області зниженого ККД.
У випадку регулювання струму, водій буде підтримувати більш вигідні з точки зору ККД порівняно мало мінливі положення педалі акселератора, забезпечуючи більш високу економічність автомобіля.
Враховуючи обумовлені раніше особливості використання електротяги на різних тягово-швидкісних режимах синергетичного автомобіля, можна зробити вибір на користь використання закону регулювання вентильного електричного двигуна М = f (α) в першій зоні і Мω = f (α) в другій зоні.
Практична реалізація системи управління тяговим
електроприводом синергетичного автомобіля. Розглянемо більш
докладно практичну реалізацію системи управління тяговим
електроприводом синергетичного автомобіля. Найбільш широко її
електромобілях і автомобілях з гібридною силовою установкою використовують вентильні електричні двигуни на основі синхронної електричної машини з висококоерцитивними постійними магнітами на роторі. Такі двигуни мають більш високий ККД і кращі електричні характеристики. Однак вони мають високу вартість.
Відносно недорогими і широко поширеними є синхронні електричні машини з електромагнітним збудженням, незважаючи на трохи гірші значення ККД, крім невисокої вартості, має ряд інших важливих переваг. Серед них - можливість організувати регулювання у другій зоні за допомогою керування потоком збудження. При фіксованій напрузі живлення це дозволяє розширити робочий діапазон швидкостей обертання ротора, а значить і збільшити передавальне число від електричного двигуна до ведучих коліс. В результаті вдається підвищити пусковий обертаючий момент без збільшення запасу потужності вентильного двигуна, аналогічно тому, як це відбувається при використанні коробки передач в автомобілі з ДВЗ. Це дозволить застосувати менш потужний електричний двигун, тому з меншою ціною та габаритами.
Розглянемо детальніше можливість використання вентильного електричного двигуна на основі синхронної електричної машини Г290 в якості електропривода синергетичного автомобіля, створеного на базі автомобіля «Таврія-пікап».
На рис. 24 показані зовнішні механічні характеристики вентильного двигуна, які наведені в координатах швидкості автомобіля і моменту на ведучих колесах автомобіля при різних значеннях передавального числа (Uk = 6, Uk = 8, Uk = 10 і Uk = 12) механічної передачі між валом електричного двигуна і колесами автомобіля.
Горизонтальні ділянки характеристик (рис. 24) обумовлені обмеженням максимального струму в фазних обмотках електронним комутатором вентильного електричного двигуна. П'ята крива є залежністю між швидкістю автомобіля і мінімально необхідним моментом, що обертає на провідних колесах для досягнення цієї швидкості. Точка перетину з цієї кривої зовнішньої механічної характеристики (при обраному значенні передавального числа Uk) визначає максимально досяжну швидкість з цим передавальним числом.
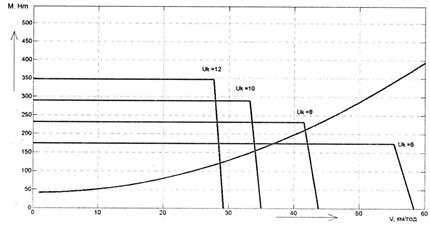
Рис. 24.Зовнішні механічні характеристики вентильного двигуна для чотирьох значень передавального числа механічної передачі між валом двигуна і колесами автомобіля Uk= 6, Uk= 8, Uk= 10, Uk = 12
Як видно з рис. 24 при зменшенні передавального числа Uk максимально досяжна швидкість синергетичного автомобіля на електричної тязі збільшується, але прийнятними значеннями Uk є тільки Uk = 8, Uk = 10 і Uk = 12, оскільки через обмежену потужність вентильного електричного двигуна при передавальному числі Uk = 6 максимальна швидкість виявляється меншою, ніж при передавальному числі Uk = 8.
Для кожного значення швидкості автомобіля різниця між ординатами обраної механічної характеристики і кривою мінімально необхідного моменту визначає величину прискорення автомобіля, тому, як видно з рис. 24, для досягнення максимального швидкого набору швидкості автомобіля необхідно зі збільшенням швидкості зменшувати передавальне число. Однак механічне перемикання передатного числа електроприводу ускладнить як конструкцію, так і управління в конверсійному
синергетичному автомобілі.
Як відомо, зміна механічних Характеристик таке ж як і при
механічному перемиканні передач може бути досягнуто шляхом регулювання у другій зоні,тобто в режимі регулювання із збереженням постійної потужності [2-4]. Це дозволяє, вибравши високу передавальне число, наприклад Uk = 12 (див. рис.24) і не змінюючи його, досягати такої ж швидкості, як і з передавальним числом Uk = 8, тобто близько 40 км/год., зменшуючи відповідним чином струм збудження в процесі набору швидкості.
Критерієм ступеня зменшення струму збудження буде при вибраній швидкості можливість досягнення максимальної потужності вентильного електричного двигуна. Для цього необхідно підтримувати максимально-припустимий струм якоря в процесі набору швидкості за рахунок зменшення струму збудження [4]. При цьому час набору швидкості буде істотно меншим, ніж при Uk = 8 і максимальному струмі в обмотці збудження.
Таким чином, система управління тяговим вентильним електричним двигуном у складі електропривода синергетичного автомобіля повинна забезпечувати управління струмом якоря в першій зоні, а також струмом якоря і струмом обмотки збудження у другій зоні таким чином, щоб водій мав можливість за необхідності максимально швидко набирати швидкість при повністю натиснутій педалі акселератора.
Загальна функціональна схема розробленої системи управління електроприводом конверсійного синергетичного автомобіля наведена на рис. 25.
У системі управління електроприводом синергетичної силової установки автомобіля, крім двохзонового управління струмом вентильного двигуна, також передбачено використання й інших переваг електричного двигуна на базі синхронної машини з електромагнітним збудженням, а саме:
- меншого гальмівного моменту в знеструмленому стані, що поліпшує накат синергетичного автомобіля;
- можливість ефективно управляти вентильним двигуном в режимі генератора, шляхом регулювання струму збудження.
Робота системи управління електроприводом синергетичної силової установки автомобіля «Таврія» залежить від положення перемикача режимів (ПР) «гібридний автомобіль - бензиновий автомобіль» (рис. 25).
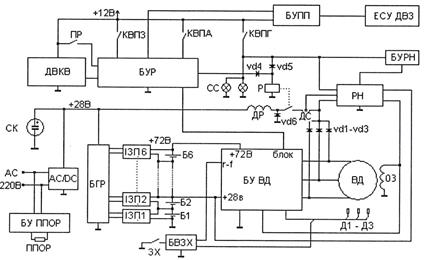
Рис. 25. Схема функціональна системи управління синергетичної силової установки автомобіля: БУ ВД - блок управління вентильним двигуном, БУР - блок управлінні режимами, ПР - перемикач режимів «гібридний автомобіль - бензиновий автомобіль», ДВКВ - датчик обертання коленвала, КВПЗ, КВПА, КВПГ- кінцеві вимикачі відповідно педалі зчеплення, педалі
акселератора і педалі гальма, БУПП - блок управління подачею палива, ЕСУ ДВЗ - електронна система управління двигуном внутрішнього згоряння, БГР - блок гальванічних розв'язок, ІЗП - імпульсний зарядно-контролюючий пристрій, БВЗХ - блок блокування включення заднього ходу, ЗХ - перемикач «задній хід - передній хід», СС - стоп-сигнал, Р - реле, РН - регулятор напруги й обмеження струму кола 28 В, БУ РН - блок управління регулятора напруги, AC/DC - мережевий блок живлення 28В 26А, ВД - вентильний двигун, 03 - обмотка збудження, ДІ...ДЗ - датчики положення ротора, ДС - датчик струму вентильного двигуна в режимі генератора, Б1...Б6 - герметизовані акумуляторні батареї 12 В, СК - суперконденсатор, ППОР - передпусковий підігрівач охолоджуючої рідини ДВЗ, БУ ППОР - блок управління передпусковим підігрівачем охолоджуючої рідини ДВЗ.
У положенні ПР «бензиновий автомобіль» управління автомобілем не відрізняється від управління звичайним автомобілем, повністю знеструмлений вентильний двигун не робить інші того опору руху.
У положенні «гібридний автомобіль» блок управлінні режимами (БУР) забезпечує можливість керування автомобілем як з електроприводом, коли важіль коробки передач знаходиться в нейтральному положенні, так і з двигуна внутрішнього згоряння, коли включена передача.
При переключенні перемикача режимів назад в положення «бензиновий автомобіль» відбувається автоматичний запуск ДВЗ. При вимиканні передачі (наприклад, перед зупинкою або при русі накатом) ДВЗ автоматично відключається, при цьому блок БУР блокує включення електронних ключів трифазного мосту і подачу струму в обмотку збудження, що забезпечує хороший накат автомобіля.
Завданням блоку блокування включення заднього ходу (БВЗХ) є запобігання можливості включення заднього ходу при русі автомобіля вперед. Перемикання напрямку руху автомобіля можливо тільки після повної зупинки автомобіля.
Для зарядки кожної з шести свинцевих герметизованих акумуляторних батарей (Б1...Б6) застосований індивідуальний імпульсний зарядно-контролюючий пристрій (ІЗП1...ІЗП6), кожен з яких окремо заряджає відповідну акумуляторну батарею спочатку стабілізованою струмом, до тих пір, поки напруга на ній не досягне напруги циклічного заряду, потім стабілізує цю напругу і коли зарядний струм досить знизиться, переходить на стабілізацію напруги буферного заряду.
Заряд блоку тягових високовольтних акумуляторних батарей, який складається з шести свинцево-кислотних герметизованих акумуляторних батарей (Б1...Б6), можливий з різних джерел електричної енергії:
- від стандартної стаціонарної електричної мережі змінного струму 220 В, 50 Гц;
від тягової вентильної електричної машини, яка при рекуперації гальмівної енергії синергетичного автомобіля переходе в генераторний режим;
- від генераторної установки двигуна внутрішнього згоряння при русі синергетичного автомобіля на ДВЗ (у разі, коли ДВЗ слабо навантажений).
При зарядці блоку тягових акумуляторних батарей (Б1...Б6) від стаціонарної електричної мережі 220 В, 50 Гц передбачена можливість використання передпускового підігрівача охолоджуючої рідини ДВЗ, блок керування яким дозволяє дистанційно (із стільникового телефону) включити підігрів охолоджуючої рідини перед виїздом, що зменшує витрату палива, а саме і шкідливі викиди, а також дозволяє відразу включати обігрів салону синергетичного автомобіля.
Живлення кожного з шести імпульсних зарядно-контролюючих пристроїв (ІЗП1...ІЗП6) повинно здійснюватися від гальванічне розв'язаного джерела, для чого в блоці гальванічних розв'язок (БГР) застосований високочастотний трансформатор з шістьма ізольованими вторинними обмотками. Для живлення БГР напругою 28 В при зарядці від електричної мережі змінного струму 220 В, 50 Гц використаний блок живлення AC/DC.
При рекуперативному гальмуванні напруга 28 В виробляється тяговою вентильною електричною машиною, яка починає працювати у генераторному режимі. За допомогою блоку регулятора напруги й обмеження струму кола 28 В (РН) струмом в обмотці збудження проводиться стабілізація напруги на рівні 28 В і обмеження струму на рівні 150 А.
Включається режим рекуперації при спрацьовуванні реле Р разом з включенням стоп-сигналу СС. Це включення відбувається, як тільки педаль гальма відходить від упору, тому рекуперація відбувається не тільки при спрацьовуванні гальмівної системи, а й просто при відведенні педалі гальма від упору, коли гальмівна система ще не працює. В останньому випадку відбувається рекуперативне гальмування електричним двигуном в режимі генератора, схоже з тим, яке має місце при примусовому холостому ході ДВЗ.
Суперконденсатор СК дозволяє збільшити струм вентильної електричної машини до максимального значення, а значить запасати максимум енергії гальмування поки натиснута педаль гальма, потім, при відпущеної педалі гальма, енергія, що була запасена в суперкопденсаторі поступово переходить в блок тягових акумуляторнихбатарей.








