 2015-06-24
2015-06-24 2647
2647168. После нанесения РУ силы и средства реабатр немедленно оставляют СП. Работы по размаскированию ВВТ и свертыванию оборудования на СП могут выполняться в ходе подготовки к пуску.
169. Командир реабатр, после нанесения удара подает команду: «Батарея, отбой. Приготовиться к маршу» и организует работу по оставлению СП. По готовности к маршу силы и средства реабатр выводятся в указанный район (на СП, Тех.П) или в ближайшее укрытое место. По прибытии в указанное место проводится осмотр ВВТ реабатр и подготовка БМ к заряжанию РС.
170. Командир (заместитель командира) реабатр докладывает командиру реадн об оставлении СП и оформляет результаты пуска в паспортах на РС и формулярах на боевые части.
171. Допускается начинать движение БМ с незачехленным пакетом при оставлении СП после пуска. После перемещения сил и средств реабатр на другие позиции работы по приведению БМ в походное положение должны быть выполнены в полном объеме.
172. Последовательность работы номеров расчета БМ 9А52 и 9П140 по команде «Отбой» приведена согласно приложениям 45 и 46 соответственно.
173. Неиспользованные при пуске комплектующие элементы РС (кабели, втулки, щиты, ящик № 2) сдаются командиру взвода хранения и транспортирования при очередном заряжании БМ.
Приложение 1
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
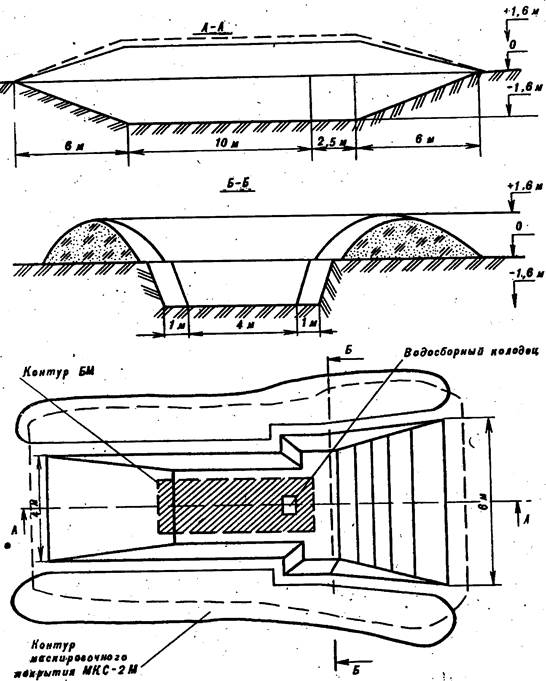
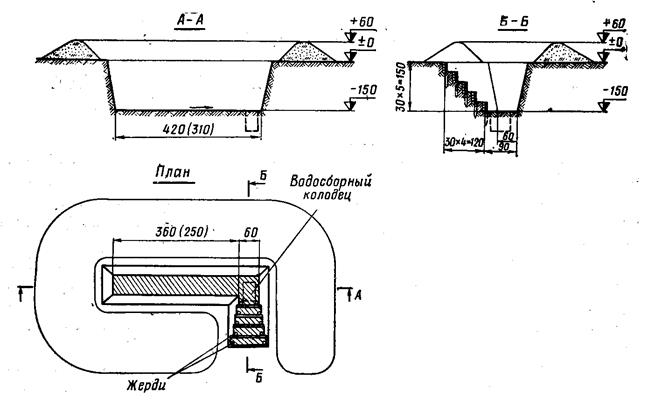
СХЕМА
окопа для боевой машины 9А52
Приложение 2
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
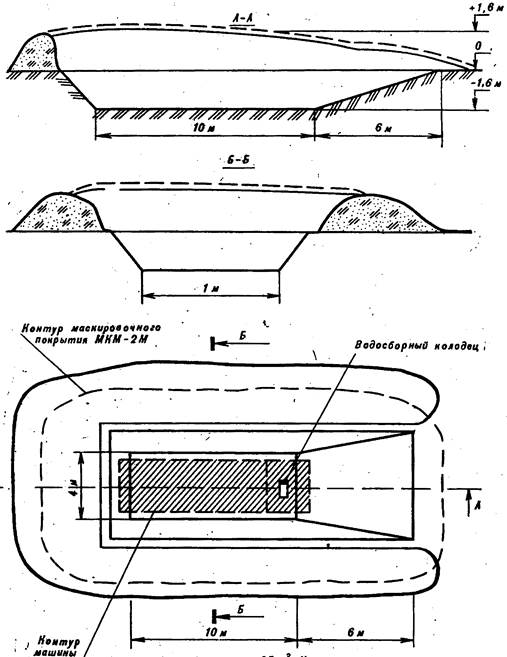
СХЕМА
окопа для боевой машины 9А52 и транспортно-заряжающей машины 9Т234
Приложение 3
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
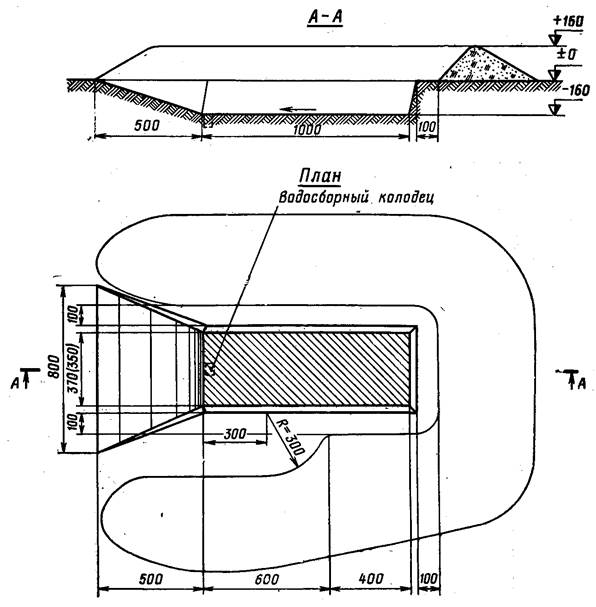
СХЕМА
окопа для боевой машины 9П140 и транспортно-заряжающей машины 9Т452
Приложение 4
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
окопа для автомобильной техники
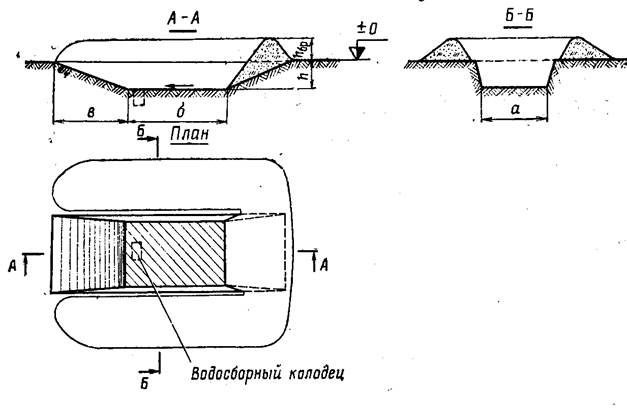
| Марка машины | Основные размеры | Объем вынутого грунта м3 | Потребное количество сил и средств | |||||
| а | б | в | h | hбр | Чел.-ч | Маш.-ч | ||
| ГАЗ 66 | 4,5 | 1,5 | 0,5 | |||||
| Урал | 3,5 | 1,7 | 1,1 | |||||
| КамАЗ | 3,5 | 2,4 | 2,7 |
Приложение 5
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
маркировки реактивного
снаряда 9М55К





























Приложение 6
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
маркировки реактивных
снарядов 9М27
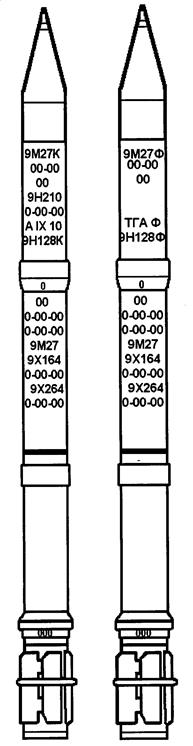
 Индекс РС
Индекс РС
 Номер партии головных частей, год снаряжения
Номер партии головных частей, год снаряжения
 Номер или шифр завода-изготовителя, на котором проводилось снаряжение
Номер или шифр завода-изготовителя, на котором проводилось снаряжение
 Индекс боевого элемента
Индекс боевого элемента
 Номер партии, год снаряжения, номер завода-изготовителя
Номер партии, год снаряжения, номер завода-изготовителя
 Шифр взрывчатого вещества
Шифр взрывчатого вещества
 Индекс головной части
Индекс головной части
 Количество компенсаторов
Количество компенсаторов
 Порядковый номер неснаряженной Р части в партии
Порядковый номер неснаряженной Р части в партии

 Номер партии неснаряженных Р части, год изготовления, номер предприятия
Номер партии неснаряженных Р части, год изготовления, номер предприятия

 Номер партии РС, год сборки РС, номер завода-изготовителя
Номер партии РС, год сборки РС, номер завода-изготовителя
 Индекс ракетной части
Индекс ракетной части

 Индекс порохового заряда
Индекс порохового заряда
Номер партии порохового заряда, год изготовления, номер завода-изготовителя
 Индекс пиропатрона
Индекс пиропатрона
Номер партии ракетных частей, год снаряжения, номер завода-изготовителя
Положение центра тяжести снаряда
 Порядковый номер снаряженной части в партии
Порядковый номер снаряженной части в партии
Приложение 7
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
ЖУРНАЛ
учета инструктажа личного состава реактивной артиллерийской батареи
по требованиям безопасности
| Воинское звание, фамилия и инициалы инструкти-руемого | Воинская должность | Наименова-ние инструкции, по которой проведен инструктаж | Воинская должность, фамилия, и инициалы проводив-шего инструктаж | Дата инструктажа | Подпись проводив-шего инструктаж | Подпись инструкти-руемого |
Приложение 8
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
ХАРАКТЕРИСТИКИ
степеней готовности реактивной артиллерийской батареи реактивной системы залпового огня 9К57
| Номер готов-ности | Характеристики готовности | Допустимое время нахождения в готовности (по техническим условиям) |
| Силы и средства реабатр развернута в боевой порядок ТГП Сп осуществлена. Карточки ТГП оформлены БМ заряжены, находятся в походном положении на точках пуска в окопах (на площадках) или вблизи от них (200 – 250 м), зачехлены и замаскированы Баллистические характеристики и тип РС известны Буссоль командира реабатр расставлена и сориентирована по дирекционному углу основного направления пусков ГК топогеодезического отделения расставлен и определен дирекционный угол на буссоль командира реабатр Метеопост развернут и периодически проводится пробное зондирование одной пулей Управление подразделениями организовано, со старшим начальником установлена (поддерживается) устойчивая связь Графики рассчитанных поправок в основном направлении пусков построены (при наличии КСАУ – координаты СП, тип и баллистические характеристики РС, метеорологические данные введены в ЭВМ | время нахождения в готовности опреде-ляется условиями оперативно-тактичес-кой обстановки и может составлять до нескольких суток | |
| Реабатр развернута в боевой порядок ТГП СП осуществлена. Карточки ТГП оформлены БМ заряжены, находятся на точках пуска и замаскированы. Домкраты опущены. Пакеты расчехлены, наведены в основное направление пусков и подняты на 1-00. Напряжение с цепей пуска снято. ВПП развернуты Буссоль командира реабатр расставлена и сориентирована по дирекционному углу исчисленному. Определены угломеры на панорамы ГК топогеодезического отделения расставлен и определен дирекционный угол на буссоль командира реабатр Баллистические характеристики РС известны Исчисленные установки по плановым целям определены, переданы на БМ Метеопост развернут и периодически проводится зондирование атмосферы на активном участке траектории Маршевые двигатели выключены и готовы к запуску Управление подразделениями организовано, со старшим начальником установлена и поддерживается устойчивая связь | Время нахождения в готовности опреде-ляется условиями оперативно-тактичес-кой обстановки, физическим состоя-нием личного состава и может составлять от несколько часов до нескольких суток | |
| Силы и средства реабатр развернуты в боевой порядок ТГП СП осуществлена. Карточки ТГП оформлены БМ заряжены, находятся на ТП и размаскированы. Пакеты наведены на цель. Напряжение с цепей пуска снято. ВПП развернуты Буссоль командира реабатр расставлена и сориентирована по дирекционному углу исчисленному. Определены угломеры на панорамы Маршевые двигатели выключены и готовы к запуску личный состав расчета находится в укрытии (БМ) Метеопост развернут и периодически проводит зондирование атмосферы на активном участке траектории Баллистические характеристики РС известны Управление подразделениями организовано, со старшим начальником поддерживается устойчивая связь | Время нахождения в готовности опреде-ляется условиями оперативно-тактичес-кой обстановки и может составлять до нескольких часов |
Приложение 9
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
ХАРАКТЕРИСТИКИ
степеней готовности реактивной артиллерийской батареи реактивной системы залпового огня 9К58
| Номер готов-ности | Характеристики готовности | Допустимое время нахождения в готовности (по техническим условиям) |
| Силы и средства реабатр развернуты в боевой порядок ТГП СП осуществлена. Карточки ТГП оформлены БМ заряжены, находятся в походном положении на точках пуска в окопах (на площадках) или вблизи от них (30 – 50 м), зачехлены и замаскированы Буссоль командира реабатр расставлена и сориентирована по дирекционному углу основного направления пусков ГК топогеодезического отделения расставлен и определен дирекционный угол на буссоль командира реабатр Графики рассчитанных поправок в основном направлении пусков построены (при наличии КСАУ – координаты СП, тип и баллистические характеристики РС, метеорологические данные введены в ЭВМ) При наличии плановых целей исчисленные установки и ДПЗ рассчитаны Баллистические характеристики РС имеются у командира реабатр Управление подразделениями организовано, со старшим начальником установлена (поддерживается) устойчивая связь | Время нахождения в готовности опреде-ляется условиями оперативно-тактиче-ской обстановки и может составлять до нескольких суток | |
| Силы и средства реабатр развернута в боевой порядок ТГП СП осуществлена. Карточки ТГП оформлены БМ заряжены, находятся на ТП и замаскированы. Пакеты расчехлены и растопорены. Домкраты опущены. На прицельных приспособлениях установлены исчисленные установки. Напряжение с НАПП снято. ВПС развернуты Буссоли командира реабатр и НР расставлены и сориентированы по дирекционному углу исчисленному. Определены угломеры на панораму ГК ТГО расставлен и определен дирекционный угол на буссоль командира реабатр Баллистические характеристики РС известны Исчисленные установки и ДПЗ определены, переданы на БМ Маршевые двигатели выключены и готовы к запуску Управление подразделениями организовано, со старшим начальником установлена и поддерживается устойчивая связь | время нахождения в готовности опреде-ляется условиями оперативно-тактиче-ской обстановки, физическим состоянием личного состава и может составлять от несколько часов до нескольких суток | |
| Реабатр развернута в боевой порядок ТГП СП осуществлена. Карточки ТГП оформлены БМ заряжены, находятся на точках пуска и размаскированы. Пакеты наведены на цель. Напряжение с НАПП снято. ВПС развернуты ДПЗ введены в аппаратуру и правильность их ввода в БСУ снаряда проверена Буссоли командира реабатр и НР расставлены и сориентированы по дирекционному углу исчисленному. Определены угломеры на панораму Маршевые двигатели выключены и готовы к запуску Расчет находится в укрытии (БМ) Баллистические характеристики РС известны Управление подразделениями организовано, со старшим начальником поддерживается устойчивая связь | Время нахождения в готовности опреде-ляется условиями оперативно-тактической обстановки и может составлять до нескольких часов |
Приложение 10
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
КАРТОЧКА
топогеодезической привязки стартовой позиции
Приложение 11
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
Схема
начального ориентирования с использованием визира ориентирования по известным ориентирным направлениям
 |
Приложение 12
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
Схема
начального ориентирования с использованием визира ориентирования и буссоли
 |
Приложение 13
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
последовательность РАБОТЫ
топогеодезического отделения при определении координат стартовой позиции (опорных точек)
с использованием топопривязчика
 |
| Старший топогеодезист | Водитель | |||
Устанавливает топопривязчик на начальной точке Проверяет исходное положение переключателей на пульте управления и КП Включает аппаратуру топопривязчика Устанавливает буссоль в 40 – 50 м впереди топопривязчика, определяет магнитный азимут средний на визирное устройство Стопорит магнитную стрелку буссоли и переносит буссоль на вторую точку (не менее 5 м от первой) Определяет магнитный азимут средний на визирное устройство со второй точки Вычисляет дирекционный угол на визирное устройство с первой точки по формуле: aвиз = Аm ср - (± DАm) Вычисляется дирекционный угол на ориентир с первой точки по формуле:  aор = aвиз ± 30-00 Вычисляет дирекционный угол продольной оси топопривязчика по формуле: αоси = αор - βвиз Изложенным выше способом повторно определяет дирекционный угол продольной оси топопривязчика по результатам вычислений полученных на второй точке Сравнивает полученные результаты вычислений. Если расхождение между дирекционными углами (αоси) не превышает 0-04, то за окончательное значение αоси берет среднее значение из двух измерений. При невыполнении данного условия ориентирование топопривязчика проводит заново с переносом буссоли на следующую точку Переводит буссоль в походное положение и укладывает ее в топопривязчик Устанавливает корректуру пути, соответствующую дорожным условиям данной местности Устанавливает карандаш построительного механизма на начальную точку, на шкалах X, Y ставит ее координаты, включает масштаб Включает датчик пути После подготовки аппаратуры к работе непосредственно перед началом движения на шкале «КУРС» устанавливает отсчет, равный среднему значению αоси Следует по выбранному маршруту на СП Останавливает топопривязчик на точке пуска, считывает со шкал КП координаты X, Y, записывает их в журнал и продолжает движение на конечную точку На конечной точке определяет ее координаты по шкалам X, У КП и записывает их в журнал aор = aвиз ± 30-00 Вычисляет дирекционный угол продольной оси топопривязчика по формуле: αоси = αор - βвиз Изложенным выше способом повторно определяет дирекционный угол продольной оси топопривязчика по результатам вычислений полученных на второй точке Сравнивает полученные результаты вычислений. Если расхождение между дирекционными углами (αоси) не превышает 0-04, то за окончательное значение αоси берет среднее значение из двух измерений. При невыполнении данного условия ориентирование топопривязчика проводит заново с переносом буссоли на следующую точку Переводит буссоль в походное положение и укладывает ее в топопривязчик Устанавливает корректуру пути, соответствующую дорожным условиям данной местности Устанавливает карандаш построительного механизма на начальную точку, на шкалах X, Y ставит ее координаты, включает масштаб Включает датчик пути После подготовки аппаратуры к работе непосредственно перед началом движения на шкале «КУРС» устанавливает отсчет, равный среднему значению αоси Следует по выбранному маршруту на СП Останавливает топопривязчик на точке пуска, считывает со шкал КП координаты X, Y, записывает их в журнал и продолжает движение на конечную точку На конечной точке определяет ее координаты по шкалам X, У КП и записывает их в журнал  Сверяет координаты, полученные с использованием аппаратуры топопривязки, с координатами, определенными по топографической карте Если расхождения в координатах конечной точки, определенных с использованием топопривязчика и по топографической карте, не выходят за пределы допусков, указанных в Таблице 1, то привязка считается законченной Если расхождения в координатах больше допустимых, то заново ориентирует топопривязчик и повторяет привязку, используя другие контурные точки Прибыв на позицию, представляет полевой журнал для проверки. С разрешения командира отделения выключает навигационную аппаратуру топопривязчика Командует: «Машину в укрытие» Сверяет координаты, полученные с использованием аппаратуры топопривязки, с координатами, определенными по топографической карте Если расхождения в координатах конечной точки, определенных с использованием топопривязчика и по топографической карте, не выходят за пределы допусков, указанных в Таблице 1, то привязка считается законченной Если расхождения в координатах больше допустимых, то заново ориентирует топопривязчик и повторяет привязку, используя другие контурные точки Прибыв на позицию, представляет полевой журнал для проверки. С разрешения командира отделения выключает навигационную аппаратуру топопривязчика Командует: «Машину в укрытие» | Ведет машину на начальную точку. Останавливает топопривязчик на начальной точке Поддерживает рабочие обороты двигателя и следит за режимом питания аппаратуры Открывает крышку визирного устройства, горизонтирует его по шаровому уровню. Наблюдая в визир, вращением маховика совмещает перекрестье сетки с изображением буссоли Снимает отсчет угла визирования βвиз Докладывает: «βвиз столько-то» Наводит визир на буссоль, установленную на второй точке, вновь определяет отсчет угла визирования и докладывает его.  Стопорит визирное устройство по-походному Закрывает крышку визирного устройства Следит за режимом питания аппаратуры Ведет машину по указанному маршруту с максимально возможной скоростью, не допуская резких торможений и крутых поворотов Останавливает топопривязчик на ТП Следит за режимом питания аппаратуры Ведет машину на конечную точку Стопорит визирное устройство по-походному Закрывает крышку визирного устройства Следит за режимом питания аппаратуры Ведет машину по указанному маршруту с максимально возможной скоростью, не допуская резких торможений и крутых поворотов Останавливает топопривязчик на ТП Следит за режимом питания аппаратуры Ведет машину на конечную точку
По команде командира отделения уводит топопривязчик в укрытие |

Приложение 14
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
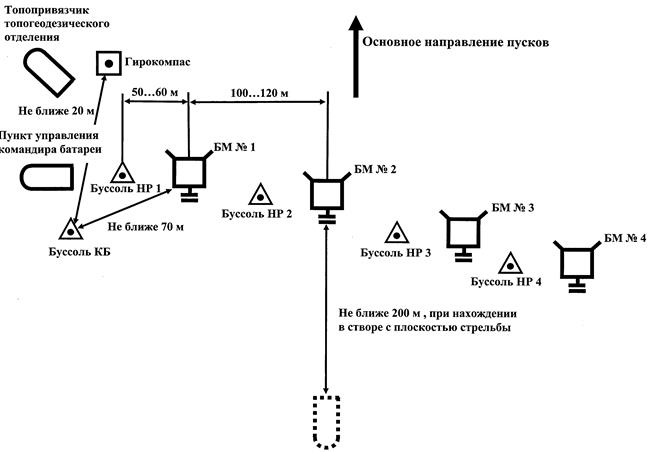
СХЕМА
размещения техники и приборов при расположении реактивной артиллерийской батареи реактивной системы залпового огня 9К57 на стартовой позиции
Приложение 15
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
размещения техники и приборов при расположении реактивной артиллерийской батареи реактивной системы залпового огня 9К58 на стартовой позиции
Приложение 16
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
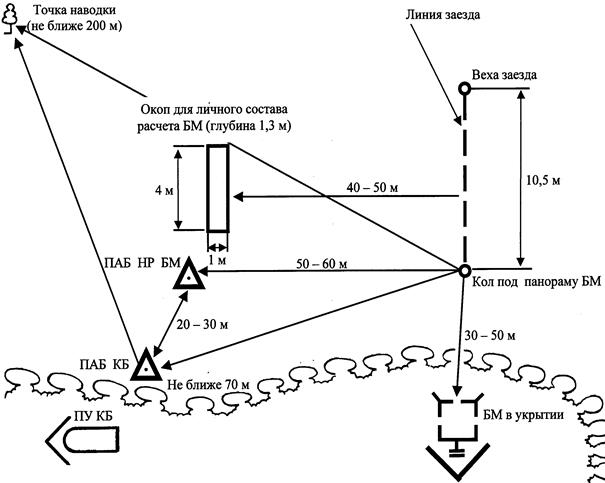
СХЕМА
размещения техники и приборов при расположении одной боевой машины на стартовой позиции
Приложение 17
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
последовательность РАБОТЫ
топогеодезического отделения при определении
дирекционных углов ориентирных направлений с использованием гирокомпаса 1Г17 по трем точкам реверсии
 |
| Командир топогеодезического отделения | Топогеодезист | ||
Вычисляет сближение меридианов Ставит задачу личному составу отделения на ТГП позиции, указывая точку стояния прибора командира реабатр, последовательность работ, срок их выполнения. Командует: «Приступить к привязке позиции» Устанавливает ГК над колом для прибора командира реабатр. Переводит ГК из походного положения в рабочее Закрепляет на угломерной части ориентир-буссоль, разворачивает угломерную часть гк так, чтобы автоколлимационная трубка находилась над пультом управления гироузла, стопорит угломерную часть в данном положении. Ориентирует гк по магнитной стрелке, разворачивая его на штативе Ставит переключатель рода работы на панели пульта управления в положение «ПУСК» (загорается три сигнальные лампы «ФАЗЫ I, II,III»)  Включением переключателя «ВПРАВО-ВЛЕВО» на пульте управления гироузла устанавливает отсчет 90±1° Наводит зрительную трубу на удаленный ориентир Разарретирует чувствительный элемент, после того как погаснут «ФАЗЫ I, II,III» и загорится лампа «ГОТОВ К РАБОТЕ», поставив переключатель рода работы в положение «РАБОТА». При этом гаснет лампа «АРРЕТИР», и загораются лампы «ФАЗЫ I, II,III» Наблюдает перемещение штрихов лимба При прекращении взаимного перемещения левых и правых штрихов лимба в нижнем окне, нажимает и отпускает кнопку «ОТКЛ. СЛЕД. СИСТЕМЫ», маховиком «МИКРОМЕТР» совмещает изображения ближайших штрихов левых и правых делений лимба Командует: «Отсчет». Определяет и громко докладывает отсчет N1 Сверяет доложенный отсчет N1 и в случае совпадения командует: «Верно» В такой же последовательности наблюдает и определяет отсчеты по второй и третьей точкам реверсии (N2 и N3) Выключает питание ГК, для чего переключатель рода работы ставит в положение «ВЫКЛ» Вычисляет азимут ориентирного направления по формуле А ор = Nср+δф +∆, где: Nср – отсчет по горизонтальному лимбу, соответствующий динамическому положению равновесия прецессионных колебаний чувствительного элемента, вычисленный по формуле Включением переключателя «ВПРАВО-ВЛЕВО» на пульте управления гироузла устанавливает отсчет 90±1° Наводит зрительную трубу на удаленный ориентир Разарретирует чувствительный элемент, после того как погаснут «ФАЗЫ I, II,III» и загорится лампа «ГОТОВ К РАБОТЕ», поставив переключатель рода работы в положение «РАБОТА». При этом гаснет лампа «АРРЕТИР», и загораются лампы «ФАЗЫ I, II,III» Наблюдает перемещение штрихов лимба При прекращении взаимного перемещения левых и правых штрихов лимба в нижнем окне, нажимает и отпускает кнопку «ОТКЛ. СЛЕД. СИСТЕМЫ», маховиком «МИКРОМЕТР» совмещает изображения ближайших штрихов левых и правых делений лимба Командует: «Отсчет». Определяет и громко докладывает отсчет N1 Сверяет доложенный отсчет N1 и в случае совпадения командует: «Верно» В такой же последовательности наблюдает и определяет отсчеты по второй и третьей точкам реверсии (N2 и N3) Выключает питание ГК, для чего переключатель рода работы ставит в положение «ВЫКЛ» Вычисляет азимут ориентирного направления по формуле А ор = Nср+δф +∆, где: Nср – отсчет по горизонтальному лимбу, соответствующий динамическому положению равновесия прецессионных колебаний чувствительного элемента, вычисленный по формуле  ; δф – формулярная поправка ГК (со своим знаком), записанная в формуляре на ГК; ; δф – формулярная поправка ГК (со своим знаком), записанная в формуляре на ГК;
Вычисляет дирекционный угол ориентирного направления по формуле: α ор = Аор – γ, где: γ – сближение меридианов со своим знаком в точке стояния ГК Полученное значение αор переводит из градусной меры в деления угломера. Перевод производит по таблице перевода из градусной системы в деления угломера Сравнивает полученную величину с величиной доложенной топогеодезистом, проверяет правильность записей и вычислений в журнале наблюдений Определяет дирекционный угол на второй удаленный ориентир, для чего на ГК включает подсветку лимба, переведя переключатель рода работы в положение «ПОДСВЕТКА» При наведенной зрительной трубе на первый удаленный ориентир маховиком «МИКРОМЕТР» совмещает изображения ближайших штрихов левых и правых делений лимба, определяет и громко докладывает отсчет на удаленный ориентир Мор1 Наводит зрительную трубу на второй удаленный ориентир, определяет и громко докладывает отсчет на удаленный ориентир Мор2 Вычисляет горизонтальный угол между удаленными ориентирами по формуле (чтобы получить величину горизонтального угла, необходимо из отсчета по правой точке вычесть отсчет по левой точке. Если отсчет по правой точке меньше, чем по левой, к отсчету по правой точке добавить 360°):
Вычисляет дирекционный угол на второй удаленный ориентир αор2 по формуле: αор2 = αор + α Полученное значение αор2 переводит из градусной меры в деления угломера. Сравнивает полученную величину с величиной доложенной топогеодезистом, проверяет правильность записей и вычислений в журнале Переводит ГК из рабочего положения в походное Записывает величины дирекционных углов в карточку ТГП | Вычисляет сближение меридианов и докладывает командиру отделения его знак и величину Вбивает кол в место, которое указал командир отделения. Вбивает в торец кола гвоздь для последующей центровки приборов Помогает командиру отделения установить ГК над колом и перевести его в рабочее положение Подготавливает журнал наблюдений, куда записывает дату, номер приема, фамилию оператора, поправку ГК и величину сближения меридианов Следит за режимом работы преобразователя и пульта управления  Используя бленду, следит за перемещением штрихов лимба По команде «Отсчет» определяет и громко повторяет отсчет N1, записывает в журнал наблюдений время наступления точки реверсии и величину отсчета N1. Докладывает отсчет N1. В такой же последовательности определяет отсчеты и ведет запись отсчетов в точках реверсии (N2 и N3) Сравнивает отсчеты N1 и N2, N1 и N3 (разница между N1 и N2 не более 85°, N1 и N3 не более 10'). Если расхождения в норме, докладывает: «Контрольные параметры в норме» Вычисляет азимут ориентирного направления по формуле: Аор = Nср+δф +∆ Вычисляет дирекционный угол ориентирного направления по формуле: α ор = Аор – γ Полученное значение αор переводит из градусной меры в деления угломера. Перевод производит по таблице перевода из градусной системы в деления угломера Закончив вычисления, докладывает: «Готово, дирекционный угол такой-то» Используя бленду, следит за перемещением штрихов лимба По команде «Отсчет» определяет и громко повторяет отсчет N1, записывает в журнал наблюдений время наступления точки реверсии и величину отсчета N1. Докладывает отсчет N1. В такой же последовательности определяет отсчеты и ведет запись отсчетов в точках реверсии (N2 и N3) Сравнивает отсчеты N1 и N2, N1 и N3 (разница между N1 и N2 не более 85°, N1 и N3 не более 10'). Если расхождения в норме, докладывает: «Контрольные параметры в норме» Вычисляет азимут ориентирного направления по формуле: Аор = Nср+δф +∆ Вычисляет дирекционный угол ориентирного направления по формуле: α ор = Аор – γ Полученное значение αор переводит из градусной меры в деления угломера. Перевод производит по таблице перевода из градусной системы в деления угломера Закончив вычисления, докладывает: «Готово, дирекционный угол такой-то»  Представляет журнал наблюдения для контроля командиру отделения Используя бленду, контролирует правильность снятия отсчетов на удаленные ТН Повторяет и записывает отсчет Мор1 в журнал Повторяет и записывает отсчет Мор2 в журнал Вычисляет дирекционный угол на второй удаленный ориентир и, закончив вычисления, докладывает: «Готово, дирекционный угол такой-то» Представляет журнал наблюдения для контроля командиру отделения Используя бленду, контролирует правильность снятия отсчетов на удаленные ТН Повторяет и записывает отсчет Мор1 в журнал Повторяет и записывает отсчет Мор2 в журнал Вычисляет дирекционный угол на второй удаленный ориентир и, закончив вычисления, докладывает: «Готово, дирекционный угол такой-то»  Помогает перевести ГК из рабочего положения в походное. Окапывает точку стояния прибора командира реабатр канавкой в виде равностороннего треугольника с длиной стороны 1 м Помогает перевести ГК из рабочего положения в походное. Окапывает точку стояния прибора командира реабатр канавкой в виде равностороннего треугольника с длиной стороны 1 м |

 .
. α = Мор1 – Мор2
α = Мор1 – Мор2Приложение 18
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СОДЕРЖАНИЕ
топогеодезической привязки подготовленной стартовой позиции для боевой машины
 |
Приложение 19
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
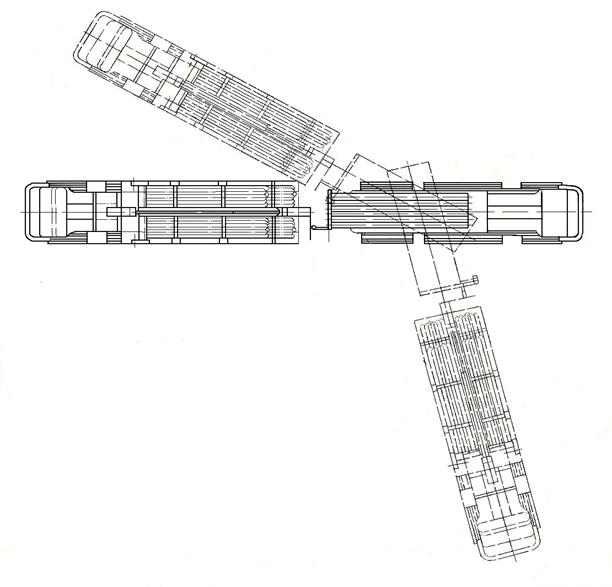
СХЕМА
размещения техники при заряжании боевой машины 9А52 с использованием траспортно-заряжающей машины 9Т234
 |

| |||
|
Приложение 20
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
размещения техники при заряжании боевой машины 9П140 использованием траспортно-заряжающей машины 9Т452
|
|
|
|

Приложение 21
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
ПОРЯДОК
запуска (выключения) двигателя Д21А1 станции питания транспортно-заряжающей машины 9Т234
1. Порядок запуска:
установить ручку переключения режимов работы редуктора в положение Д21А1;
установить ручку переключения привода насоса в положение «ВКЛ.»;
включить тумблер «МАССА» на панели приборов в кабине водителя;
включить тумблер «ПИТАНИЕ» на ПКУ, при этом загорается лампа подсветки и контрольная лампа «РАЗРЯД АБ» на ПКУ;
включить рукоятку «ТОПЛИВО» в положение «БОЛЬШЕ» и удерживать ее во включенном положении до погасания лампы «ТОПЛИВО»;
установить рукоятку «ДЕКОМПРЕССОР» в положение «ВКЛ.» и удерживать его в этом положении;
включить тумблер «ЗАПУСК» на ПКУ и прокручивать двигатель с использованием стартера в течение 3 – 5 сек (продолжительность работы стартера не должна превышать 20 сек);
отпустить рукоятку «ДЕКОМПРЕССОР», при этом происходит запуск двигателя и выход его на рабочие обороты;
проконтролировать погасание лампы «РАЗРЯД АБ»;
после запуска двигателя с использованием рукоятки «ТОПЛИВО» установить средние обороты работы двигателя (1000 – 500 об/мин) по тахометру на ПКУ и прогреть двигатель до температуры масла в магистрали не ниже 40°;
после прогрева двигателя с использованием рукоятки «ТОПЛИВО» установить рабочие обороты двигателя (1800 – 1900 об/мин).
2. Порядок выключения:
перевести переключатель «ТОПЛИВО» в положение «МЕНЬШЕ» и уменьшить обороты дизеля Д21А1 по тахометру ПКУ до холостых (1000 – 500 об/мин);
дать поработать дизелю на холостых оборотах в течение
1 – 2 мин;
включить переключатель «ТОПЛИВО» в положение «МЕНЬШЕ» и удерживать его до тех пор, пока не погаснет лампа «ТОПЛИВО» и не остановится дизель;
проконтролировать загорание лампочки «РАЗРЯД АБ»;
выключить тумблер «ПИТАНИЕ» на ПКУ и тумблер «МАССА» в кабине водителя;
отстопорить педаль муфты сцепления.
Приложение 22
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
заряжания реактивными снарядами
боевой машины 9А52
Вид с торца пакета БМ 9А52
 |
Вид с торца РС на ложементах ТЗМ 9Т234
 |
Приложение 23
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
заряжания реактивными снарядами
боевой машины 9П140
Вид с торца пакета БМ 9П140
Вид с торца снаряда на ложементах ТЗМ 9Т452
 |
Приложение 24
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
заряжания реактивными снарядами боевой машины 9А52 (при неполном заряжании)
Вид с торца пакета БМ 9А52
 |
Приложение 25
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
заряжания реактивными снарядами боевой машины 9П140 (при неполном заряжании)
Вид с торца пакета БМ 9П140
 |
Приложение 26
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
последовательность РАБОТЫ
номеров расчета боевой машины по занятию стартовой позиции и приведению реактивной артиллерийской батареи в готовность № 3
| Действия НР | Порядок действий номеров расчета | |||||||
| 1-й номер – заместитель НР | 2-й номер – старший механик-водитель | 3-й номер – наводчик | ||||||
Получив команду на занятие СП, выводит БМ из укрытия и останавливает ее в 10 – 15 м от ТП Подает команду: «Расчет, занять стартовую позицию, готовность № 3» Становится на линии заезда между вехой заезда и колом под панораму, указывает механику-водителю направление заезда на ТП Руководит заездом БМ на ТП, находясь у вехи заезда Командует:
| Дублирует команду НР Разворачивает проводную линию связи. Подключает телефон ТА 57 к проводной линии связи. Выходит по телефону на связь с ПУ командира батареи Докладывает: «1-й, готово» | Заезжает на ТП так, чтобы левые колеса БМ прошли слева от кола под панораму вдоль линии заезда до упора левым поворотником в веху заезда Включает стояночный тормоз Выключает маршевый двигатель |
Выбегает к ТП и становится в 3 – 5 м от кола под панораму БМ Контролирует точность заезда БМ на ТП так, чтобы кол под панораму находился посередине заднего левого колеса БМ Проверяет исходное положение переключателя «ПИТАНИЕ НАПП» (переключатель должен находиться в положении «ВЫКЛ») Проверяет исходное положение переключателя «ПРИВОД-РУЧН» (переключатель должен находиться в положении «ПРИВОД»)
Контролирует отсутствие свечения лампочки «УРОВЕНЬ МАСЛА» на пульте сигнализации Докладывает: «3-й, готово» |

 Проверяет положение переключателей «ОТРАБОТКА» и «ПУСК АДВ» (при всех работах, связанных с подготовкой и пуском снарядов, переключатель «ОТРАБОТКА» должен быть в нижнем положении, а переключатель «ПУСК АДВ» – в верхнем)
Проверяет положение переключателей «ОТРАБОТКА» и «ПУСК АДВ» (при всех работах, связанных с подготовкой и пуском снарядов, переключатель «ОТРАБОТКА» должен быть в нижнем положении, а переключатель «ПУСК АДВ» – в верхнем)Приложение 27
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СХЕМА
укрытия личного состава расчета боевой машины для пуска реактивных снарядов с выносного пульта пуска
 |
Приложение 28
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
КАРТОЧКА
данных полетного задания для расчета боевой машины 9А52
 |
Приложение 29
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
БЛАНК
начальника расчета БМ №________
СП № _______ ОНП __________ Цель № __________
Исполнительная команда ____________________ Время ____________
| Данные для пуска | ||||||
| Писч | ||||||
| Доворот - д | ||||||
| Тисч | ||||||
| ΔТ | ||||||
| Ф | ||||||
| К1 | ||||||
| К2 | ||||||
| Расход РС | ||||||
| Ориентирование ПАБ | ||
| Аm1 | ||
| Аm2 | ||
| Аm3 | ||
| Аmср | ||
| − (±ΔАm1) | ||
| = αор |
| Наведение по ТН | ||
| Угл тн | ||
| ± д исч | ||
| = Угл исч | ||
| Наведение по буссоли | ||
| αон | ||
| ± д исч | ||
| = αцисч | ||
| Угл б.п. | ||
| Угл уточн. б.п. |
| Основные данные | ||
| αон | ||
| Угл отн | ||
| Угл зтн | ||
| Угл коллиматор | ||
| αотн | ||
| αзтн | ||
| α паб КБ | ||
| Контроль наведения | ||
| αб.п. | ||
| + Отмп.б. | ||
| = αн.бм | ||
| − αцисч | ||
| = Δнав | ||
| Температура заряда | ||
| t°С (ПС-1) | ||
| Время замера | ||
| Поправка на несоответствие углов возвышения по прицелу и квадранту | Поправка на увод линии прицеливания при придании пакету углов возвышения | ||
| Пи=200-300 | 0-00 – 6-00 | ||
| Пи=301-400 | 6-00 – 8-00 | ||
| Пи=401-500 | 8-00 – 9-00 | ||
| Пи=501-600 | |||
| Пи=601-700 | |||
| Пи=701-800 | |||
| Пи=801-900 |
Приложение 30
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
СПОСОБЫ И ПРАВИЛА
наведения пакета направляющих боевой машины на цель по направлению
В зависимости от обстановки, погодных условий и времени суток могут быть использованы следующие способы наведения (далее – наведение на цель):
по удаленной ТН;
по буссоли;
по коллиматору.
Исходным положением для наведения на цель с применением перечисленных выше способов следующее положение: БМ находится на ТП; приборы наведения и контроля расставлены и сориентированы; определены угломеры на основную (запасную) ТН по основному направлению пуска; при необходимости расставлен коллиматор.
1. Наведение по удаленной ТН.
При нахождении БМ на ТП и наведении БМ по удаленной ТН, НР, зная угломер на ТН и получив от командира реабатр значение доворота, исчисленного от основного направления пусков, рассчитывает угломер, исчисленный на ТН по формуле:
Углтнисч = Угл тн ± д исч,
где: Углтнисч – угломер исчисленный на ТН;
Углтн – известны угломер на удаленную ТН;
д исч – доворот исчисленный от основного направления пусков.
Полученный исчисленный угломер НР сообщает наводчику. Получив угломер, наводчик выставляет его значение на шкалах панорамы БМ и с использованием рукояток ПН, поворачивает пакет направляющих так, чтобы перекрестье панорамы было наведено на удаленную ТН.
Н а п р и м е р:
Командир реабатр подал команду: «Основное направление, правее 2-30, наводить в основную».
НР, имея угломер на ОТН (45-24), рассчитывает угломер, исчисленный на отдаленную ТН (45-24 + 2-30 = 47-54), и командует наводчику, например: «Третьему, угломер 47-54, наводить в ТН, что слева впереди – зарубка на дереве».
Наводчик дублирует команду, устанавливает на шкалах панорамы скомандованный угломер (47-54), громко считывает его (для контроля со стороны НР) и, работая поворотным механизмом, поворотом пакета направляющих наводит вертикальную нить перекрестья панорамы на указанную ТН. По окончании наведения докладывает: «Третий, угломер 47-54, готово».
Рис.1. Схема наведения БМ в цель по удаленной ТН
2. Наведение по буссоли.
При нахождении БМ на ТП в боевом положении, расставленной и сориентированной по дирекционному углу буссоли, НР, получив от командира величину доворота, исчисленного от основного направления пусков, рассчитывает дирекционный угол цели, исчисленный по формуле:
αцисч = αон ± д исч,
где: αцисч – дирекционный угол цели исчисленный;
αон – дирекционный угол основного направления пусков;
д исч – доворот, исчисленный от основного направления пусков.
Вращением отсчетного червяка буссоли НР устанавливает на буссольном кольце и барабане черного цвета отсчет, равный дирекционному углу цели исчисленному (αцисч). На угломерном кольце и барабане красного цвета он устанавливает отсчет 0-00, наводит буссоль на панораму БМ и по красной шкале определяет угломер на панораму (Углп). Полученный угломер командует наводчику БМ. Получив угломер, наводчик выставляет его значение на шкалах панорамы БМ и с использованием рукояток ПН поворотом пакета направляющих наводит перекрестье панорамы в буссоль.
Чтобы исключить ошибку в наведении из за ухода панорамы, работы по наведению БМ с использованием буссоли, НР проводит дважды, командуя наводчику уточненный угломер.
Если наведение БМ проводится с помощью буссоли командира (заместителя командира) реабатр, после наведения БМ в цель наводчик отмечается по точкам наводки (или по коллиматору) и записывает угломеры. Этим закрепляется наведение БМ на цель по удаленным ТН.
Н а п р и м е р:
Командир реабатр подал команду: «Основное направление, правее
2-30, навести БМ»;
НР, имея дирекционный угол основного направления пусков αон
(56-00), рассчитывает дирекционный угол цели исчисленный αисч
(56-00 + 2-30 = 58-30), на буссольном кольце и барабане черного цвета устанавливает отсчет дирекционного угла цели исчисленного (58-30), на угломерном кольце и барабане красного цвета устанавливает отсчет 00-00 и наводит перекрестье буссоли на панораму БМ, снимает отсчет по угломерному кольцу на панораму и командует его наводчику, например: «Третьему, угломер 27-54, наводить в буссоль».
Наводчик дублирует команду, устанавливает на шкалах панорамы скомандованный угломер (27-54), громко считывает его (для контроля со стороны НР) и, работая поворотным механизмом, поворотом пакета направляющих наводит вертикальную нить перекрестья панорамы на буссоль НР. По окончании наведения докладывает: «Третий, угломер
27-54, готово».
НР уточняет наводку буссоли на панораму, снимает по угломерному кольцу повторно угломер на панораму и командует наводчику, например: «Третьему, угломер 27-56, наводить в буссоль».
Наводчик дублирует команду, устанавливает на шкалах панорамы скомандованный угломер (27-56), громко считывает его (для контроля со стороны НР) и, работая поворотным механизмом, поворотом пакета направляющих наводит вертикальную нить перекрестья панорамы на буссоль начальника расчета. По окончании наведения докладывает: «Третий, угломер 27-56, готово».
 |
Рис.2. Схема наведения БМ в цель по буссоли.
3. Наведение по коллиматору.
Коллиматор К-1 является оптическим прибором и используется в качестве ТН для горизонтального наведения пакета направляющих в условиях плохой видимости. При работе с коллиматором ошибка в наведении не превышает 0-01, то есть достигается такая же точность, как и при наведении по удаленной ТН.
Наиболее удобное для работы удаление коллиматора от панорамы
6 – 8 м. Если по условиям местности коллиматор нельзя установить на таком удалении, его можно разместить в пределах от 3 до 13 м слева от панорамы.
В случае, когда невозможно произвести наведение БМ по удаленным ТН или буссоли, а также при возникновении других ситуаций, затрудняющих наведение БМ, командир реабатр дает команду: «Батарея, установить коллиматоры».
НР повторяет данную команду и дает указания номерам расчета на выставление коллиматора;
Наводчик устанавливает на панораме отсчет, например 45-00, и руководит выставлением коллиматора;
Заместитель НР выставляет коллиматор слева от БМ на удалении
5 – 8 м так, чтобы он был в поле зрения окуляра панорамы БМ;
Получив доклад от наводчика, что коллиматор находится в поле зрения окуляра панорамы, заместитель НР горизонтирует коллиматор, с использованием мушки наводит коллиматор на головку панорамы и по команде наводчика плавно вращает маховичок установочного червяка коллиматора.
Наводчик наблюдает в окуляр панорамы и по готовности (при совмещении вертикальных линий, между которыми находятся одноименные цифры, буквы) командует: «Стоп», затем докладывает НР: «Третий, угломер 45-00, готово».
НР проверяет наводку и докладывает командиру реабатр: «БМ
№ такой-то, готово».
В дальнейшем в ходе выполнения задач по подготовке и нанесения РУ коллиматор используется в качестве ТН. Наведение БМ по коллиматору проводится в той же последовательности, что и при наведении по удаленной ТН.
Н а п р и м е р:
Командир реабатр подал команду: «Основное направление, правее
2-30, наводить в коллиматор».
НР, имея угломер на коллиматор (45-00), рассчитывает угломер исчисленный (45-00 + 2-30 = 47-30) и командует наводчику: «Третьему, угломер 47-30, наводить в коллиматор».
Наводчик дублирует команду, устанавливает на шкалах панорамы скомандованный угломер (47-30), громко считывает его (для контроля со стороны НР) и, работая поворотным механизмом, поворотом пакета направляющих совмещает вертикальные линии панорамы и коллиматора, между которыми находятся одноименные цифры и буквы. По окончании наведения он докладывает: «Третий, угломер 47-30, готово».
Приложение 31
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
ПРАВИЛА
контроля наведения пакета направляющих боевой машины на цель по направлению
Контроль наведения пакета направляющих БМ на цель по направлению осуществляет командир (заместитель командира) реабатр с привлечением личного состава топогеодезического отделения. При этом применяется один из следующих способов контроля:
определение угломера контрольного;
определение дирекционного угла наведенного пакета.
1. Определение контрольного угломера.
Командир реабатр:
определяет дирекционный угол с буссоли командира реабатр на панораму контролируемой БМ;
вычитая из исчисленного дирекционного угла цели дирекционный угол с буссоли на панораму, получает контрольный угломер:
Угл.к = αцисч — α б.п.,
где: Угл.к – рассчитанный контрольный угломер;
αцисч – исчисленный дирекционный угол цели;
α б.п. – дирекционный угол с буссоли на панораму;
сравнивает контрольный угломер и отметку с панорамы на буссоль командира реабатр;
запрашивает у наводчика отметку с панорамы на буссоль командира реабатр;
вычитая из рассчитанного угломера доложенную отметку, определяет величину ошибки наведения (поправку наведения со своим знаком):
Δнав = Отмп.б. — Углк,
где: Δнав – ошибка наведения;
Отмп.б. – отметка с панорамы контролируемой БМ на буссоль;
Угл.к – рассчитанный контрольный угломер.
2. Определение дирекционного угла наведенного пакета
Командир реабатр:
определяет дирекционный угол с буссоли командира реабатр на панораму контролируемой БМ;
запрашивает у наводчика отметку с панорамы на буссоль командира реабатр;
определяет дирекционный угол наведенного пакета по формуле:
αн.бм = αб.п. + Отмп.б.,
где: α н.бм. – дирекционный угол наведенной БМ (если сумма будет больше 60-00, из нее вычитают 60-00);
α б.п. – дирекционный угол с буссоли на панораму;
Отмп.б. – отметка с панорамы контролируемой БМ на буссоль;
определяет ошибку в наведении БМ в цель (поправку наведения со своим знаком) по формуле:
Δнав = αн.бм. — αцисч
где: Δнав – ошибка наведения;
α н.бм. – дирекционный угол наведенной БМ;
αцисч – исчисленный дирекционный угол цели.
Если контроль наведения осуществляется более точным способом, чем проводилось наведение БМ (наведение с использованием буссоли, контроль по ГК), то поправка наведения будет равна величине полученной ошибки.
Если контроль наведения и наведение БМ проводились с использованием приборов одинаковой точности, то поправка наведения принимается равной половине полученной ошибки.
Приложение 32
к Руководству по боевой работе в реактивной артиллерийской батареи реактивной системы залпового огня крупного калибра 9К57 (9К58)
последовательность РАБОТЫ
номеров расчета при наведении боевой машины на цель по исчисленным установкам
 |
| Действия командира реабатр | Порядок действий номеров расчета |
| НР | 3-й номер – наводчик |
| ПРИ НАВЕДЕНИИ БМ ПО БУССОЛИ | |
| Командует: «Начальнику расчета № такой-то, основное направление правее (левее) столько-то, провести наведение» | Дублирует команду командира реабатр Рассчитывает дирекционный угол цели исчисленный (αисч) по формуле: αцисч = αон ± д исч, где: αцисч – дирекционный угол цели исчисленный; αон – дирекционный угол основного направления пусков; д исч – доворот исчисленный от основного направления пусков Вращением отсче |








