 2015-07-03
2015-07-03 2773
2773В качестве нагрузки управляемых выпрямителей включают якорную цепь двигателя независимого возбуждения, за счет изменения угла отпирания a управляемых вентилей регулируют в широких пределах угловую скорость двигателя.
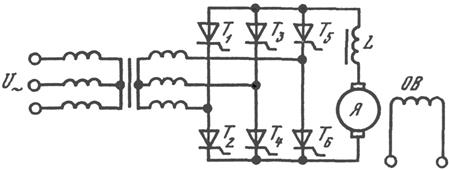
Рис. 6. Схема трехфазного мостового управляемого выпрямителя
На рис. 6 показана мостовая схема трехфазного управляемого выпрямителя. Тиристоры  ,
,  ,
,  открываются в положительные, а тиристоры
открываются в положительные, а тиристоры  ,
,  ,
,  в отрицательные полупериоды фазных напряжений. Интервал проводимости каждого тиристора равен
в отрицательные полупериоды фазных напряжений. Интервал проводимости каждого тиристора равен  , в каждый момент времени открыты два тиристора и напряжение на якоре определяется разностью фазных напряжений двух вторичных обмоток трансформатора, т.е. линейным напряжением. Механическая характеристика системы
, в каждый момент времени открыты два тиристора и напряжение на якоре определяется разностью фазных напряжений двух вторичных обмоток трансформатора, т.е. линейным напряжением. Механическая характеристика системы
 , [4]
, [4]
где  – активное сопротивление преобразователя и дросселя.
– активное сопротивление преобразователя и дросселя.
Механическая характеристика прямолинейна, но ее жесткость меньше, чем у двигателя в системе Г-Д (генератор-двигатель).
При снижении нагрузочного момента наступает режим прерывистых токов, для которого соотношение [4] недействительно, реальные характеристики указаны штрихованными линиями.
В системе УВ-Д двигатель может работать в двигательном режиме (I квадрант), в режимах противовключения (наклонная штриховка) и динамического торможения (прямая с  ) и в генераторном режиме, т.е. в режиме рекуперативного торможения (вертикальная штриховка), когда УВ переходит в инверторный режим (рис. 7).
) и в генераторном режиме, т.е. в режиме рекуперативного торможения (вертикальная штриховка), когда УВ переходит в инверторный режим (рис. 7).
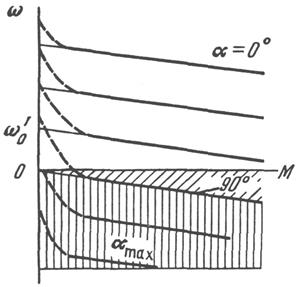
Рис. 7. Механические характеристики системы УВ–Д
Для осуществления реверса можно изменить с помощью контактного переключения полярность напряжения на обмотке возбуждения или на якоре.
Для приводов высокого быстродействия применяют реверсивные УВ (рис. 8).
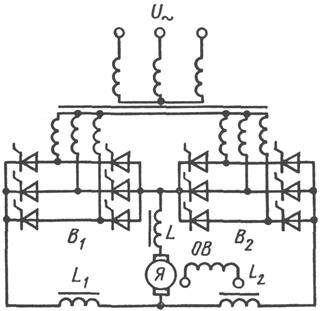
Рис. 8. Схема реверсивной системы УВ–Д
При работе системы УВ-Д в двигательном режиме один управляемый выпрямитель, например  , работает в режиме выпрямления, а второй
, работает в режиме выпрямления, а второй  закрыт или подготовлен для работы в режиме инвертирования.
закрыт или подготовлен для работы в режиме инвертирования.
Для исключения передачи энергии в сеть через инвертор должно выполняться условие
 ,
,
где  ,
,  – напряжения управляемых выпрямителей, работающих в режимах инвертирования и выпрямления.
– напряжения управляемых выпрямителей, работающих в режимах инвертирования и выпрямления.
При работе системы в режиме рекуперативного торможения один из выпрямителей находится в режиме инвертирования, а второй закрыт или подготовлен к работе в режиме выпрямления.
При совместной работе выпрямителей ограничивают уравнительные токи, протекающие между выпрямителями за счет разности мгновенных значений их напряжений. Для этого включают дроссели L1 и L2.
Вид механических характеристик реверсивной системы УВ-Д зависит от способа согласования углов a обоих управляемых выпрямителей. Возможны два вида управления выпрямителями реверсивной системы – совместный и раздельный.
При совместном управлении  , и
, и  . Механические характеристики показаны на рис. 9а. Недостатком совместного управления является возможность протекания уравнительных токов. Для полного исключения уравнительных токов используют раздельное управление выпрямителями. Управляющие импульсы подаются только на работающий в данный момент выпрямитель. Вентили другого выпрямителя в это время закрыты. При изменении режима работы устройство управления подает импульсы на второй выпрямитель с задержкой, необходимой для его надежного запирания. Механические характеристики системы с раздельным управлением показаны на рис. 9б. Разрыв характеристик объясняется наличием режима прерывистых токов.
. Механические характеристики показаны на рис. 9а. Недостатком совместного управления является возможность протекания уравнительных токов. Для полного исключения уравнительных токов используют раздельное управление выпрямителями. Управляющие импульсы подаются только на работающий в данный момент выпрямитель. Вентили другого выпрямителя в это время закрыты. При изменении режима работы устройство управления подает импульсы на второй выпрямитель с задержкой, необходимой для его надежного запирания. Механические характеристики системы с раздельным управлением показаны на рис. 9б. Разрыв характеристик объясняется наличием режима прерывистых токов.
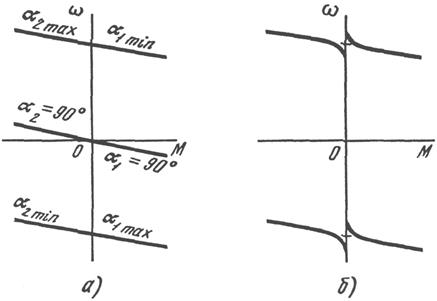
Рис. 9.
3. Замкнутые электроприводы с подчиненным регулированием координат
Качественное регулирование координат в системе П–Д обеспечивает принцип подчиненного регулирования. Этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.
Чтобы ограничить ток и момент, нужно ограничить сигнал, поступающий с внешнего контура.
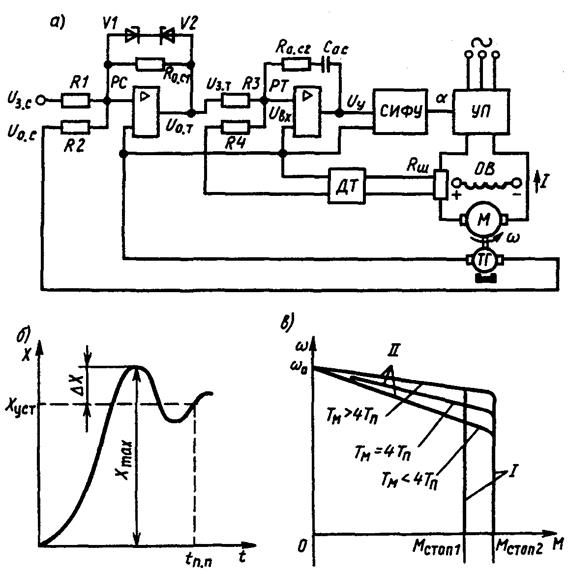
Рис. 10.
Рассмотрим схему ЭП (рис. 10а) с подчиненным регулированием, выходной регулируемой координатой которой является скорость. Управляющая часть схемы состоит из двух замкнутых контуров: контура регулирования тока (момента), содержащего регулятор тока РТ и датчик тока ДТ, и контура регулирования скорости, содержащего регулятор скорости PC и датчик скорости (тахогенератор) ТГ.
Регуляторы тока и скорости выполняются на базе операционных усилителей. Включение в цепь задающего сигнала скорости  регулятора скорости PC и его обратной связи резисторов
регулятора скорости PC и его обратной связи резисторов  и
и  обеспечивает изменение этого сигнала с коэффициентом
обеспечивает изменение этого сигнала с коэффициентом  . Аналогично изменение сигнала обратной связи по скорости
. Аналогично изменение сигнала обратной связи по скорости  происходит с коэффициентом
происходит с коэффициентом  . Такой регулятор получил название пропорционального регулятора скорости.
. Такой регулятор получил название пропорционального регулятора скорости.
Включение в цепь обратной связи регулятора тока РТ конденсатора  последовательно с резистором
последовательно с резистором  позволяет получить на выходе РТ сигнал в виде суммы двух составляющих:
позволяет получить на выходе РТ сигнал в виде суммы двух составляющих:
 ,
,
где  ,
,  – коэффициенты усиления сигналов.
– коэффициенты усиления сигналов.
Здесь сигнал  содержит пропорциональную и интегральную составляющие входного сигнала
содержит пропорциональную и интегральную составляющие входного сигнала  , т.е. РТ является в этом случае пропорционально-интегральным (П - И) регулятором.
, т.е. РТ является в этом случае пропорционально-интегральным (П - И) регулятором.
Схема и параметры цепей регулятора выбираются из условия желаемого характера переходных процессов при регулировании координат. Обычно выбираются переходные процессы с затухающими колебаниями (рис. 10б), что позволяет обеспечить устойчивость этих процессов при небольших длительностях и перерегулированиях.
Распространенным методом настройки регуляторов является так называемый технический оптимум, при котором перерегулирование  составляет 4,3% от установившегося уровня, а время переходного процесса
составляет 4,3% от установившегося уровня, а время переходного процесса  , где
, где  – электромагнитная постоянная времени тиристорного преобразователя, принимаемая обычно равной 0,01 с.
– электромагнитная постоянная времени тиристорного преобразователя, принимаемая обычно равной 0,01 с.
Схема подчиненного регулирования позволяет простыми средствами ограничить координаты ЭП заданным уровнем. В схеме, приведенной на рис. 10а, для этой цели в цепь обратной связи PC включены стабилитроны V1 и V2, которые, ограничивая выходное напряжение PC, являющееся входным задающим сигналом тока  , ограничивают ток и момент двигателя.
, ограничивают ток и момент двигателя.
На рис. 10, в приведены статические характеристики ЭП с подчиненным регулированием координат и настройкой на технический оптимум. Их особенностью является наличие вертикального участка I, на котором обеспечивается ограничение тока и момента, и участка II с жесткими характеристиками, наклон которых зависит от соотношения двух постоянных времени – электромеханической двигателя  и электромагнитной преобразователя
и электромагнитной преобразователя  .
.
В схемах подчиненного регулирования используется и другой критерий настройки регуляторов по симметричному оптимуму, который позволяет получить абсолютно жесткие статические характеристики на участке II, но переходные процессы в этом случае характеризуются большим перерегулированием, доходящим до 55%. При настройке по симметричному оптимуму регулятор скорости PC выполняется пропорционально-интегральным.
Схемы с подчиненным регулированием координат нашли широкое применение в регулируемых ЭП как постоянного, так и переменного тока.

