 2015-07-21
2015-07-21 11154
11154Физической основой определения скорости цели в радиолокации является эффект Доплера.
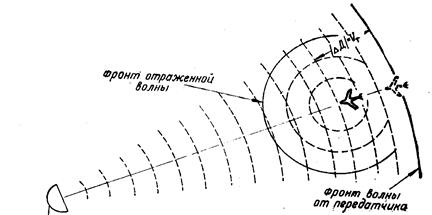
Эффект Доплера заключается в том, что при перемещении цели относительно РЛС с радиальной скоростью Vr (скоростью изменения дальности до цели) частота отраженного от цели сигнала отличается от частоты зондирующего сигнала на частоту Доплера FV. Поэтому по изменению частоты принимаемого сигнала можно судить о радиальной скорости цели.
Действительно, пусть передатчик РЛС облучает цель, излучая зондирующий сигнал на частоте f0 (рис.2.2).
|
|
|
Рис.2.2. Эффект Доплера.
Если, например, за 1 с. цель приблизилась на расстояние ∆D, то за это время на нее попадает не только число колебаний f0, но и некоторое дополнительное количество колебаний ∆f. Оно равно числу длин волн, которое укладывается на расстоянии ∆D, т.е. ∆f = ∆D/λ.
Т.к. расстояние ∆D, пройденное целью за 1с. равно радиальной скорости цели Vr относительно РЛС, то
∆f = Vr/λ
Частота колебаний f1, попадающих на объект, возрастает на ∆f, т.е.:
f1 = f0 + ∆f
Частота колебаний f2, отраженных от движущейся цели, также повышается на величину ∆f, т.е.:
f2 = f1 + ∆f = f0 + 2∆f
Следовательно, частота сигнала отраженного от движущейся цели f2 отличается от частоты зондирующего сигнала f1 на частоту Доплера FV, т.е.: Fv = f2 – f1 = 2Δf = 2Vr/λ
Отсюда:
Vr = Fvλ/2
Таким образом, определение радиальной скорости цели в радиолокации сводится к измерению доплеровского приращения частоты отраженного от цели сигнала.
Определение дальности, угловых координат и скорости целей производится в радиолокации различными методами.
Выбор метода измерений зависит, прежде всего, от типа зондирующего радиолокационного сигнала, который используется в РЛС.
Зондирующий радиолокационный сигнал может быть
- непрерывным,типа U = U0sin(ω0t + φ0) (рис.2.3,б) или
- импульсным,типа U = U0sin(ω0t + φ0), при 0 ≤ t ≤ τI
U = 0, при 0 > t > τI (рис.2.3,а),
где: U0 – амплитуда колебаний;
ω0 – несущая частота колебаний;
φ0 – начальная фаза колебаний.
τI – длительность зондирующего импульса.
|
|
| ||||
Рис.2.3. Зондирующие радиолокационные сигналы:
а – импульсный; б – непрерывный.
Достоинство импульсного зондирующего сигнала – простота разделения прямого и отраженного сигнала по времени.
Возможность такого разделения обеспечивает работу приемника и передатчика РЛС на одну общую приемопередающую остронаправленную антенну, которая обычно представляет собой весьма сложное, громоздкое и дорогостоящее сооружение.
Недостаток импульсного сигнала – для получения больших дальностей действия РЛС требуются высокие импульсные мощности излучения. Поэтому предъявляются повышенные требования к электрической прочности антенно-волноводного тракта РЛС, что не всегда технически достижимо.
Этот недостаток импульсного сигнала преодолевается с помощью внутриимпульсной частотной (фазовой) модуляции или фазокодовой манипуляции зондирующего сигнала и использованием специальных методов обработки отраженного от цели сигнала. В соответствии с этим различаются и методы радиолокационных измерений, которые применяются в РЛС с импульсным излучением.
Наоборот, главным достоинством непрерывного зондирующего сигнала является достижение большой дальности действия РЛС при незначительных мощностях излучения.
Однако существенным недостатком непрерывного зондирующего сигнала, ограничивающим его применение в радиолокации, являются значительные трудности, возникающие при разделении прямого и отраженного сигнала, которые присутствуют на входе приемника одновременно.
Разделение прямого и отраженного сигнала в РЛС с непрерывным излучением достигается путем модуляции непрерывного зондирующего сигнала по какому-либо периодическому закону.
Принципиально для этого может быть использован любой вид модуляции: амплитудная, частотная или фазовая, а также их комбинации. В общем случае напряжение модулированного сигнала можно записать следующим образом:
U(t) = Ua(t)sin[ω0t + φ(t) + φ0],
где: Ua(t) – закон амплитудной модуляции;
φ(t) – закон фазовой модуляции;
dφ(t)/dt – закон частотной модуляции;
ω0 – несущая частота колебаний;
φ0 – начальная фаза колебаний.
Таким образом, методы радиолокационных измерений, которые применяются в РЛС с непрерывным излучением так же, как и для импульсных РЛС, различаются в зависимости от способа модуляции непрерывного зондирующего сигнала.
Контрольные вопросы.
Вопрос 1. Максимальная дальность импульсной РЛС Dmax равна:
а). 30 км;
б). 75 км;
в). 300 км.
Определить:
Максимальное время запаздывания отраженного от цели сигнала tD max и рекомендуемую длительность зондирующего импульса τI РЛС.
Решение:
tD max= 2Dmax /с
а). tD max = 2·10-4 с. = 200 мкс.
б). tD max = 5·10-4 с. = 500 мкс.
в). tD max = 2·10-3 с. = 2000 мкс.
В радиолокации, как правило, применяют кратковременные сигналы, для которых длительность импульса τI «tD max. Обычно τI = 0,05 – 5 мкс.
Вопрос 2. Максимальная скорость воздушных целей равна:
а). Самолета МИГ – 29: V = 2450 км/ч;
б). Самолета МИГ – 19: V = 1370 км/ч;
в). Вертолета Ка – 27: V = 290 км/ч.
Определить:
Доплеровский сдвиг частоты FV отраженного от этих целей сигнала для РЛС с рабочей длиной волны: λ1 = 10 см;
λ2 = 3 см.
Решение:
FV = 2Vr/λ
а). FV1 = 13611 Гц = 13,6 кГц; FV2 = 45370 Гц = 45,4 кГц.
б). FV1 = 7611 Гц = 7,6 кГц; FV2 = 25370 Гц = 25,4 кГц.
в). FV1 = 1611 Гц = 1,6 кГц; FV2 = 5370 Гц = 5,4 кГц.

