 2015-08-21
2015-08-21 635
635| Грузоподъемность | 0,2 кг | |
| Погрешность позиционирования | -0,05...+0,05 мм | |
| Число степеней подвижности | ||
| Транспортирующие перемещения | ход | скорость |
| - вертикальное | 30 мм | 100 мм/с |
| - горизонтальное | 150 мм | 300 мм/с |
| - поворот | 120 град. | 90 – 120 град. |
| Тип системы управления | цикловая | |
| Число точек позиционирования по каждой подвижности | ||
| Число переходов (тактов) в цикле | ||
| Тип привода | пневматический | |
| Давление воздуха | 3…5 кг/см2 |
Установка точек позиционирования схвата
Так как манипулятор робота МП – 9С работает в цилиндрической системе координат, зона его обслуживания имеет форму вырезки из цилиндрического кольца с 8 угловыми точками (рис.1). Остановки схвата ПР возможны только в угловых точках 1, 2,…,8 рабочей зоны, так как система управления данного ПР – цикловая, и позволяет программировать только 2 точки позиционирования по каждой подвижности.
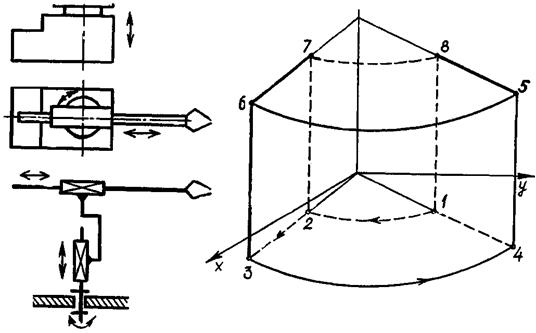
Рис. 1.
Размеры зоны обслуживания можно изменять при настройке робота на заданный цикл операций путем установки крайних положений руки манипулятора и схвата. При этом учитывается, что технологические операции (захват заготовки или детали, сброс, обработка) возможны только в точках позиционирования 1, 2,..,8.
Настройка ПР на точку позиционирования схвата по некоторой подвижности выполняется в следующем порядке:
1) ручное перемещение схвата в заданную точку, точная фиксация его в данном положении; при необходимости схват может быть сжат в ручном режиме управления роботом;
2) перестановка в нужное положение соответствующего упора, точная его регулировка и фиксация;
3) регулировка соответствующего конечного выключателя-геркона (необходимо только при установке угловых положений руки);
4) проверка срабатывания операции «поворот» в ручном режиме управления (если операция не довыполняется, на пульте управления загорается лампочка «ра6ота»).








