 2015-08-12
2015-08-12 298
298Цель работы: 1) изучение свободных колебаний физического маятника и определение его основных характеристик; 2) опреде-ление ускорения свободного падения.
Оборудование. В комплект измерительной установки входят:
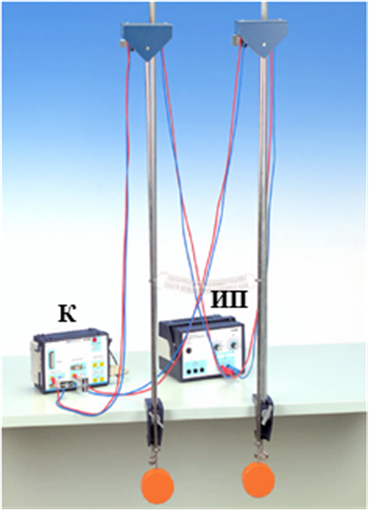
 один из физических маятников установки, приведенной на рисун-ке 1; источник питания ИП; аналогово-цифровой преобразова-тель «Кобра 3» К; измерительная рулетка; соединительные провода. Физический маятник состоит из металлического стерж-ня на конце которого укреплено твердое тело (диск). Масса диска зна-чительно больше массы стержня. Длину стержня можно изменять в неболь-ших пределах с помощью резьбового соединения. Механические колебания физического маятника преобразуются в цифро-вой электрический код с помощью «Кобра 3», ко-торый обрабатывается программой “Measure” и выводятся на монитор в виде зависимости U(t).
один из физических маятников установки, приведенной на рисун-ке 1; источник питания ИП; аналогово-цифровой преобразова-тель «Кобра 3» К; измерительная рулетка; соединительные провода. Физический маятник состоит из металлического стерж-ня на конце которого укреплено твердое тело (диск). Масса диска зна-чительно больше массы стержня. Длину стержня можно изменять в неболь-ших пределах с помощью резьбового соединения. Механические колебания физического маятника преобразуются в цифро-вой электрический код с помощью «Кобра 3», ко-торый обрабатывается программой “Measure” и выводятся на монитор в виде зависимости U(t).
Рис. 1. Измерительная установка
- 3 -
Краткая теория
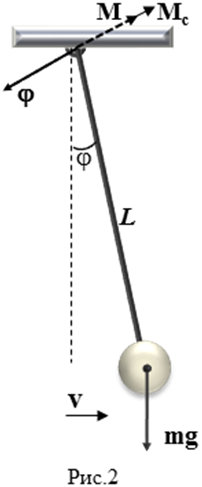
Рассмотрим свободные колебания физического маятника, состоящего из груза, прикрепленного к стержню (рис2). Масса груза значительно превышает массу стержня. Расстояние от точ-ки подвеса до центра масс груза равно L. Колебания маятника в вертикальной плоскости будут описываться углом φ отклонения его от вертикали. В процессе свободных колебаний на маятник действуют момент силы тяжести М и момент сил трения Мт, обусловленный силой трения в подшипнике и сопротивлением воздуха. Пусть в некоторый момент времени маятник отклоняется вправо (рис.2). Вектор углового перемещения φ увеличивается и направлен вдоль оси вращения «к нам», а вектор момента силы тяжести - «от нас». Модуль вектора момента силы тяжести при малых (когда sinφ»j) колебаниях равен:
 (1)
(1)
Вектор суммарного момента сил трения и сопротивления направлен вдоль оси вращения «от нас», а его модуль зависит от угловой скорости
 (2) где k- коэффициент пропорциональности, зависящий от формы и размеров маятника и вязкости среды.
(2) где k- коэффициент пропорциональности, зависящий от формы и размеров маятника и вязкости среды.
- 4 -
Основное уравнение динамики вращательного движения  с учетом уравнений (1) и (2), имеет вид
с учетом уравнений (1) и (2), имеет вид  (3) где I- момент инерции маятника относительно оси вращения. Разделив (3) на I и введя обозначения - mgL/I = ω02, k/I = 2β, получим однородное дифференциальное уравнение второго порядка
(3) где I- момент инерции маятника относительно оси вращения. Разделив (3) на I и введя обозначения - mgL/I = ω02, k/I = 2β, получим однородное дифференциальное уравнение второго порядка  , (4) где ω0 – циклическая частота незатухающих колебаний. Решением уравнения (4) является зависимость углового перемещения от времени
, (4) где ω0 – циклическая частота незатухающих колебаний. Решением уравнения (4) является зависимость углового перемещения от времени  (5) где φ0 - амплитуда колебаний в начальный момент, т.е. t = 0; β – коэффициент затухания; a- начальная фаза; w - циклическая частота затухающих колебаний. На рисунке 3 представлена зависимость (5), полагая, что величи-на напряжения в любой момент времени пропорциональна угловому перемещению. В теории колебаний широко используют метод векторных диаграмм. Так из векторной диаграммы (рис.3) можно определить значение начальной фазы:
(5) где φ0 - амплитуда колебаний в начальный момент, т.е. t = 0; β – коэффициент затухания; a- начальная фаза; w - циклическая частота затухающих колебаний. На рисунке 3 представлена зависимость (5), полагая, что величи-на напряжения в любой момент времени пропорциональна угловому перемещению. В теории колебаний широко используют метод векторных диаграмм. Так из векторной диаграммы (рис.3) можно определить значение начальной фазы:  (6) Циклическая частота затухающих колебаний равна
(6) Циклическая частота затухающих колебаний равна
 , (7). а амплитуда в момент времени t -
, (7). а амплитуда в момент времени t -  (8). Зная угловые перемещения в начальный момент времени и в момент времени t определим из уравнения (8) коэффициент затухания
(8). Зная угловые перемещения в начальный момент времени и в момент времени t определим из уравнения (8) коэффициент затухания  (9)
(9)
- 5 -
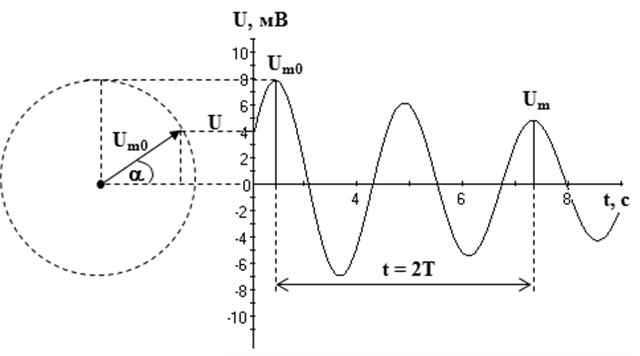
Рис.3. На графике U(t) напряжение пропорционально угловому перемещению.
Логарифмический декремент λ затухающих колебаний связан с коэффициентом затухания зависимостью  (10) а добротность Q колебательной системы –
(10) а добротность Q колебательной системы –  (11)
(11)
При слабом затухании (β2 << ω02) период колебаний мало отличается от периода незатухающих колебаний и определяется формулой:
 (12)
(12)
где:  - приведенная длина физического маятника.
- приведенная длина физического маятника.
Так как момент инерции стержня мал по сравнению с моментом инерции груза, то груз можно принять за материальную точку с
- 6 -
моментом инерции I=mL2, а приведенная длина физического маятника будет практически совпадать с длиной математического маятника L»Lпр. Длиной математического маятника будем считать расстояние от оси вращения до центра масс груза. Тогда из формулы (12) можно определить ускорение свободного падения:  (13)
(13)








