 2015-08-21
2015-08-21 1052
10521. Оптимизация функционирования страничной виртуальной памяти. Методы повышения эффективности функционирования страничной виртуальной памяти.
2. Планирование мультипрограммных вычислительных процессов. Виды планирования. Обобщенная схема планирования с учетом очередей заданий и процессов.
Задача
У контроллера DMA четыре канала. Контроллер способен запрашивать 32-разрядное слово через каждые 100 нс. Ответ на запрос занимает столько же времени. насколько быстрой должна быть шина, чтобы не стать узким местом системы?
1) –
2) Мультипрограммирование, или многозадачность, — это способ организации вычислительного процесса, при котором на одном процессоре попеременно выполняются сразу несколько программ. Таким образом, в многозадачных системах в памяти одновременно содержится код нескольких процессов. В работе каждого из процессов периоды использования процессора чередуются с ожиданием окончания ввода-вывода или других событий. Ключом к эффективной работе мультипрограммных систем явяляется планирование.
Обычно используются четыре вида планирования:
-планирование ввода-вывода – решение о том, какой из запросов процессов на операцию ввода-вывода будет обработан свободным устройством;
-долгосрочное планирование – решение о добавлении процесса ко множеству выполняемых процессов;
-среднесрочное планирование – решение о добавлении процесса к числу процессов полностью или частично размещенных в основной памяти;
-краткосрочное планирование – решение о том, какой из доступных процессов будет выполняться процессором.
Последние три вида являются планированием процесора (процессорного времени).
Долгосрочное планирование указывает, какие задания допускаются к выполнению системой, и тем самым определяет степень многозадачности. Долгосрочный планировщик рещает две задачи: во-первых, способна ли система обработать новые процессы; если да, то какое именно задание из ожидающих в очереди следует превратить в процесс.
Решение о том, когда следует создавать новый процесс определяет желаемый степень многозадачности. Чем больше процессов будет создано, тем меньшая доля времени будет тратиться на обслуживание каждого из них. Следовательно, планировщик может ограничивать степень многозадачности, чтобы обеспечить удовлетворительный уровень обслуживания текущих процессов. Также планировщик вызывается в обратном случае – когда время простоя процессора превышает определенный порог.
Среднесрочное планирование является частью системы свопинга, т.е. переноса части основной памяти на диск: если в основной памяти нет ни одного готового к выполнению процесса, операционная система переносит один из блокированных процессов на диск и добавляет к очереди приостановленных процессов, а затем из этой очереди загружает другой процесс и продолжает его выполнение. Таким образом, среднесрочное планирование связано со степенью многозадачности и вопросами управления памятью.
Можно утверждать, что долгосрочный планировщик работает сравнительно редко, среднесрочный – несколько чаще; чаще всего работает краткосрочный планировщик, или диспетчер. Его задача – определить какой из процессов будет выполняться на процессоре следующим. Диспетчер вызывается при наступлении события, которое может приостановить текущий процесс, например:
прерывание ввода-вывода,
прерывание таймера,
вызовы операционной системы.
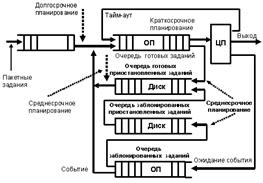
Продемонстрируем работу типов планирования процессора, используя переходы состояния процесса и очереди заданий и процессов.
Долгосрочное планирование осуществляется при добавлении нового процесса к множеству готовых к выполнению процессов.
Среднесрочное планирование отвечает за размещение процессов в основной памяти (загрузку и выгрузку), т.е. за переход в состояние «приостановленный» (готовый или заблокированный) и обратно.
Краткосрочное планирование состоит в определении того, какой из готовых процессов будет выполняться на процессоре или будет заблокирован.
По сути планирование представляет собой управление очередями с целью минимизации задержек и оптимизации производительности системы – и следовательно является одной из наиболее важных функций опреационной системы.
Задача 51:
Максимальная скорость работы контроллера = 100*10-9 слов в секунду = 4 *10^7 байт в секунду ~= 38mb/s. С такой скоростью данные и должны передаваться по шинам. Поскольку каналов 4, то данные могут передаваться параллельно, т.е. скорость шины должна быть ~= 9.5mbyte/sec

