 2015-08-21
2015-08-21 2043
2043Технику расчета крутого восхождения удобно рассмотреть для простейшего случая -одного фактора.
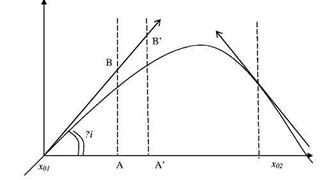
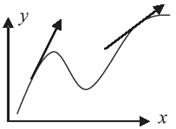
Рисунок 7.7.7 — Расчет координат точек в направлении градиента
Значение коэффициента регрессии равно tg угла наклона между линией регрессии и осью данного фактора. Если tg умножить на интервал варьирования ОА, то получим катет АВ, где В — координаты точки, лежащие на градиенте. Обобщение на i-факторов делается механически, коэффициенты умножаются на соответствующие интервалы. Получаются точки, лежащие на том же градиенте. Различны только шаги — они получаются, если к нулевому уровню последовательно прибавлять величины, пропорциональные составляющим градиента.
Шаг движения по градиенту выбирается экспериментатором, если сделаете его минимальным — придется проводить много опытов при движении к оптимуму, максимальным -можно проскочить оптимум.
Величины составляющих градиента определяются формой поверхности отклика и тем, как выбран параметр оптимизации, нулевая точка и интервалы варьирования. Знак составляющих градиента зависит от формы поверхности отклика и положения нулевой точки xq
Итак, если для данной поверхности отклика (предполагается, что один оптимум) выбраны нулевая точка и интервалы варьирования, проведен эксперимент, оценены коэффициенты регрессии, то направление градиента задается однозначно и является
единственным.
Правило: расчет крутого восхождения. В крутом восхождении независимые переменные изменяют пропорционально величинам коэффициентов регрессии и с учетом их знаков. Составляющие градиента однозначно получаются умножением коэффициентов регрессии на интервалы варьирования по каждому фактору. Серия опытов (называются мысленными) в направлении градиента рассчитывается последовательным прибавлением к основному уровню факторов величин, пропорциональных составляющим градиента.
Далее в эксперименте реализуются мысленные опыты (обычно только те, условия которых выходят за область эксперимента хотя бы по одному фактору). Потом выполняется анализ на достижение оптимума, а далее:
окончание исследования (канонический анализ), если оптимум найден, или последовательный поиск (еще раз делается шаг крутого восхождения).
Крутое восхождение эффективно, если реализация мысленных опытов на стадии крутого восхождения улучшило значение параметра оптимизации по-сравнению с самым хорошим результатом в матрице планирования. Если крутое восхождение эффективно, то можно:
или окончить исследование (в зависимости от того как поставлена задача оптимизации), или совершить следующий цикл крутого восхождения; или исследовать почти стационарную область (область оптимума) методами нелинейного планирования (построить план 2-го порядка для исследования области оптимума).
Если крутое восхождение неэффективно, — можно построить линейный план нового цикла.
Итак, сначала исследование проводим внутри малой подобласти. Выбираем некоторую точку в факторном пространстве. И в данной точке факторного пространства планируем эксперимент -далее интерполяция с помощью линейного полинома. А затем экстраполируем (вне нашей подобласти), делаем небольшой шаг и проводим эксперимент, и цикл повторяется до тех пор, пока движение по градиенту не перестанет быть эффективным. Это значит, что мы попали в область, близкую к оптимуму. Такая область называется "почти стационарной".
Таким образом, процедура поиска оптимума основана на шаговом принципе: проводятся короткие (небольшие, насколько возможно) серии прогонов, по их результатам строят математическую модель (линейную регрессию). Полученную модель используют для оценки градиента (направления движения к оптимуму). А далее делается небольшой шаг в направлении градиента и ставят новые эксперименты в этом направлении и т.д. Получается циклический процесс, который заканчивается при попадании в область, близкую к оптимуму ("почти стационарную" область).
Многошаговая итерационная процедура, реализуемая методологией анализа поверхности отклика условно включает следующие этапы:
1. Планирование эксперимента, т.е. выбор комбинаций уровней факторов. Методика использует полные и дробные типа 2*р планы эксперимента и некоторые специальные планы.
2. Подбор уравнения регрессии по наблюдениям. Отклик рассматривается как функция независимых переменных Уравнение линейной регрессии описывает поверхность отклика в некоторой точке (нулевой или центральной).
3. "Влезание" по поверхности отклика к вершине. Для нахождения направления увеличения отклика служит метод "крутого восхождения". В направлении, где ожидается увеличение отклика, этапы 1,2,3 повторяются до тех пор, пока не будет достигнута область максимума.
4. Исследование почти стационарной области с помощью полиномов 2-го порядка (см. в разделе 7.6. специальные планы для анализа поверхности отклика). Канонический анализ в области максимума функции отклика. Канонический анализ показывает, имеется ли один максимум, несколько максимумов, седловая точка или гребень.
Давайте теперь подробнее остановимся на заключительных этапах, связанных с анализом "почти стационарной" области (см. рис. 7.7.8 – 7.7.11).
Хотя последовательное использование эксперимента с 2 n комбинациями и измерениями в центральной точке не дает возможность точно определить точку оптимума, оно, однако, позволит исследователю быстро найти окрестность точки оптимума, которую можно назвать почти стационарной областью. Однако вблизи точки оптимума описанная пошаговая процедура уже не эффективна. Вблизи точки оптимума линейная аппроксимация перестает быть удовлетворительной, и для аппроксимации необходимо брать полином более высокого порядка. По достижении такой области необходимо исследовать вид в ней поверхности отклика, чтобы определить более точно оптимальную точку. Для этой цели обычно используются аппроксимации полиномами второго и более высокого порядка. Переход к полиномам высокого порядка вызывается существенной потерей точности аппроксимации полиномом первого порядка.
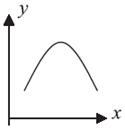 | 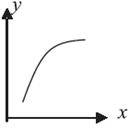 | 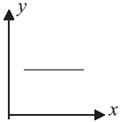 |  |
| Рисунок 7.7.8 | Рисунок 7.7.9 | Рисунок 7.7.10 | Рисунок 7.7.11 |
Канонический анализ. Тот факт, что достигнута почти стационарная область, не означает, что мы находимся изблизи точки максимума, как это имеет место на рисунке 7.7.2 (также см. рис. 7.7.8). Мы можем при этом находиться на медленно поднимающемся гребне, как на рисунке 7.7.3 (также см. рис. 7.7.9), или на гребне постоянной высоты, как на рисунке 7.7.4 (также см. рис. 7.7.10). При движении по градиенту возможны различные ситуации. Наиболее благоприятны случаи:
параметр оптимизации проходит через максимум (рис.7.7.8.), параметр оптимизации все время возрастает (рис.7.7.9.), более сложный случай: нарушена предпосылка одноэкстремальности. Возможно, что мы достигли окрестности минимаксной точки (иногда называемой седловой точкой), которая является точкой максимума по одним направлениям и точкой минимума по другим (рис. 7.7.5.). Появление седловой точки может сообщить нам полезную информацию о том, что наша поверхность отклика имеет два или более максимума, и, следуя методу скорейшего подъема, мы можем найти не глобальный, а некоторый локальный, второстепенный максимум (также см. рис. 7.7.11).
Метод наискорейшего подъема не гарантирует сходимость в точку глобального максимума. В какую именно точку максимума сойдется построенная с его помощью последовательность, зависит от начальных условий эксперимента. Если предполагается наличие нескольких максимумов, то один из основных способов отыскания глобального максимума — это повторное применение метода наискорейшего подъема с меняющимися в широкой области начальными условиями. То есть надо продвинуться в другую точку факторного пространства, построить линейный план нового цикла крутого восхождения. Хотя такой случай и возможен, в реальных условиях обычно имеется единственный максимум, и это упрощает дело.
Неэффективны случаи:
· наблюдается уменьшение параметра оптимизации (возможно есть ошибки в расчетах).
· все опыты на градиенте имеют одно и то же значение (рис. 7.7.10.). Поверхность отклика имеет вид постоянного гребня.
СПИСОК ЛИТЕРАТУРЫ
1. Balci О. Credibility Assessment of Simulation Results//Proceedings of the 1986 Winter Simulation Conference. 4986. -да. 39-44.
2. Balci O. (1994) Validation, Verification and Testing Techniques Throughout the Life Cycle of a Simulation Study, Annals of Operation Research.
3. Balci О. Verification, validation and accreditation//Proceedings of the 1998 Winter Simulation Conference.-1998. -да. 41-48.
4. Carson J.S. Model verification and validation//Proceedings of the 2002 Winter Simulation Conference. -2002. -да. 52-58.
5. Henriksen J. An Introduction to SLX Proceedings of the 1997 Winter Simulation Conference IEEE 1997 p. 593-599.
6. Law A.M., McComas, M.G. How to build valid and credible simulation models//Proceedings of the 2001 Winter Simulation Conference.- 2001. — pp. 22-29.
7. Sargent R.G. Some approaches and paradigms for verifying and validating simulation models//Proceedings of the 2001 Winter Simulation Conference. -5001.- pp, 106-114.
8. Schriber T. Introduction to Simulation Using GPSS/H N4 John Willey & Sons 1991.
9. W. David Kelton, Randall P. Sadowski, Deborah A. Sadowski Simulation with Arena -WCB/McGraw-Hill, 1998.
10. Бахвалов Л.А. Компьютерное моделирование: долгий путь к сияющим вершинам, Компьютерра. 1997, № 40. с.26-36.
11. Бусленко Н.П. Моделирование сложных систем. -М.: Наука, 1978, 400 с.
12. Варжапетян А.Г. Имитационное моделирование на GPSS/H. —М.: Вузовская книга, 2004.
13. Имитационное моделирование в задачах синтеза структуры сложных систем (оптимизационно-имитационный подход)./Цвиркун А.Д., Акинфиев В.К. и др. -М.: Наука, 1985.- 176 с.
14. Имитационное моделирование производственных систем/Под общей редакцией А.А. Вавилова. -М.: Машиностроение; Берлин: Техника, 1983. - 416 с.
15. Имитационное моделирование социально-экономических систем. Алексеев Ю.Н., Биткова Г.В. и др. – 1986.
16. Имитационные системы принятия экономических решений/К.А. Багриновский и др. -М.: Наука, 1989.
17. Имитационный анализ регионального воспроизводства./Ответственный редактор доктор физ.-мат. наук Булавский В.Г. -Новосибирск: Наука, сибирское отделение, 1987г. -176 с.
18. Калашников В.В. Организация моделирования сложных систем. -М.: Знание, 1982, 62 с.
19. Киндлер Е. Языки моделирования, пер. с чешск. М.: Энергоатомиздат, 1985. 288 с.
20. Клейнен Дж. Статистические методы в имитационном моделировании 4,2 т.- М: Статистика, 1978.
21. Клир Дж. Системология. Автоматизация решения системных задач. — М.: Радио и связь, 1990.
22. Коблев Н.Б. Основы имитационного моделирования сложных экономических систем. -М.: Дело, 2003.
23. Кугаенко А.А. Основы теории и практики динамического моделирования социально-экономических объектов и прогнозирования их развития. -М.: Вузовская книга 1998. -392с.
24. Лекции по теории сложных систем. Бусленко Н.П., Калашников В.В. и др. -М.: Сов. радио, 1973.- 440 с.
25. Лоу А.М., Кельтон В.Д. Имитационное моделирование. Классика CS — 3-е издание -Питер, 2004.
26. Лычкина Н.Н. Методические указания к курсовому проектированию по дисциплине "Имитационное моделирование экономических процессов", ГУУ, -М.: 2004.
27. Лычкина Н.Н. Имитационное моделирование социально-экономического развития регионов/Первая всероссийская научно-практическая конференция "Опыт практического применения языков и программных систем имитационного моделирования в промышлен ности и прикладных разработках" ИММОД -2003, Санкт-Петербург, 2003.
28. Лычкина Н.Н. Компьютерное моделирование социально-экономического развития регионов в системах поддержки принятия решений,/III Международная конференция "Идентификация систем и задачи управления" SICPRO'04, М., 2004.
29. Лычкина Н.Н. Моделирование социально-экономического развития регионов./Материалы научно-практического семинара кафедры информационных систем./Под ред. Ю.М. Черкасова; ГУУ, М., 2001.
30. Лычкина Н.Н. Системы принятия решений в задачах социально-экономического развития регионов. Компьюлог, № 2 (32), М., 1999.
31. Лычкина Н.Н. Современные тенденции в имитационном моделировании — “Вестникуниверситета", серия "Информационные системы управления" № 2, ГУУ, М., 2000.
32. Лычкина Н.Н. Технологические возможности современных систем моделирования./Банковские технологии, Выпуск 9, М., 2000.
33. Максимей И.В. Имитационное моделирование на ЭВМ. -М.: Радио и связь, 1988.- 232с.
34. Методы и модели управления проектами в металлургии. Смирнов В.С., Власов С.А. и др. -М.: СИНТЕГ, 2001.- 176 с.
35. Нейлор Т. Машинные имитационные эксперименты с моделями экономических систем./Пер. с англ. -М.: Мир, 1975.- 502 с.
36. Перегудов Ф.И. Тарасенко Ф.П. Введение в системный анализ: учеб. пособие для ВУЗов. -М.: Высш.шк., 1989.- 367 с.
37. Планирование экспериментов при поиске оптимальных условий./Адлер Ю.П. и др. -М.: "Наука", 1971.
38. Прангишвили И.В. Системный подход и общесистемные закономерности. -М.: СИНТЕГ, 2000.- 528 с.
39. Прицкер А. Введение в имитационное моделирование и язык СЛАМ П/пер. с англ. -М: Мир, 1987.- 646 с.
40. Ресин В.И., Попков Ю.С. Развитие больших городов в условиях переходной экономики. Системный подход. -М.: Эдиториал УРСС, 2000.
41. Руководство пользователя по GPSS World./Перевод с английского/. — Казань: Изд. "Мастер Лайн", 2002. -384 с.
42. Рыжиков Д.И. Имитационное моделирование систем массового обслуживания. -А.: ВИККИимА.Ф, Можайского, 1991.- 111с.
43. Системный анализ и проблемы развития городов. Попков Ю.С., Посохин М.В. и др. –1983.
44. Советов Б.Я., Яковлев СА. Моделирование систем.- М.: Высшая школа, 2003, 320с.
45. Советов Б.Я., Яковлев С.А. Моделирование систем: учебник для ВУЗов. -М.: Высшая школа, 1985 (1999).- 224 с.
46. Социальные системы. Формализация и компьютерное моделирование: учебное пособие./А.К. Гуц, В.В. Коробицын и др. — Омск: Омский Государственный Университет, 2000. –160 с.
47. Технология системного моделирования./Под общей редакцией Емельянова С.В. -М.: Машиностроение, 1998.
48. Томашевский В., Жданова Е. Имитационное моделирование в среде GPSS. -М: Бестселлер, 2003. -416 с.
49. Трахтенгерц Э.А. Компьютерная поддержка принятия решений: Научно-практическое издание. Серия "Информатизация Росси на пороге XXI века".- М: СИНТЕГ, 1998.
50. Трахтенгерц Э.А. Субъективность в компьютерной поддержке управленческих решений. -М.: СИНТЕГ, 2001.- 256 с.
51. Форрестер Дж. Динамика развития города. -М.: Прогресс, 1974.
52. Форрестер Дж. Мировая динамика. -М.: Наука, 1978.
53. Форрестер Дж. Основы кибернетики предприятия (индустриальная динамика)/пер. с англ., общая редакция Д.М. Гвишиани —М: Прогресс, 1971.-340 с.
54. Шеннон Р. Имитационное моделирование систем —искусство и наука. -М.: Мир, 1978
55. Шрайбер Т. Дж. Моделирование на GPSS -М.: Машиностроение, 1980.- 592 с.
56. Яцкив И.В. Проблема валидации имитационной модели и ее возможные решения. — Материалы конференции ИММОД -2003, 2003г. с. 211-217.
57. Ильин А.А., Евсюков В.В, Ильин Р.А. Математические методы и модели анализа динамических процессов в экономике: Монография.- Тула:ТулГУ, 2002. 139 с.
58. Ильин А.А., Попков Н.А., Лейман С.А. Алгоритм построения приближенной модели нелинейного многомерного статического объекта // Алгоритмы и структуры специализированных вычислительных устройств. - Тула:ТулПИ, 1980. С. 40 – 47.
59. Ильин А.А., Евсюков В.В, Ильин Р.А. Методика синтеза математической модели объекта в классе разностных уравнений с учетом запаздывания по входным переменным //Известия ВУЗов. Приборостроение. 2003. Т. 46, № 11. С. 55 - 59.
60. Ильин А.А. и др. Модели технических разведок и угроз безопасности информации. Коллективная монография. /Под ред. Е.М. Сухарева. Кн. 3. - М.: Радиотехника, 2003. - 144 с.
61. Ильин А.А., Евсюков В.В, Ильин Р.А. Случайный поиск в задачах структурной идентификации с внешними критериями // втоматизация и современные технологии. 2003, № 9. С. 16 - 22.
62. Берсенев Г.Б, Ильин А.А. Тугов С.К. Об одном подходе к исследованию информационно-справочных машин // Техническая кибернетика. - Тула:ТулПИ, 1977. С. 51 – 55.








