 2015-09-06
2015-09-06 2405
2405| Марка | 1Г46 |
| Тип | квантовий з двоплощинною незалежною стабілізацією поля зору, з каналом лазерного управління ракетою |
| Збільшення панкратичне, крат | 2,7-12 |
| Поле зору, град. | 20-4,5 |
| Кути наведення стабілізованої лінії візування, град.: у вертикальній площині: вниз вгору у горизонтальній площині | |
| Діапазон вимірювання дальності до цілі, м | 400-5000 |
| Максимальна похибка вимірювання дальності до цілі, м | + 10 |
| Кількість вимірювань дальності за хвилину | |
| Інтервал між вимірюваннями, с, не менше |
Приціл 1Г46 (схема 1.4) складається з декількох частин, кожна з яких є функціонально завершеним блоком.
Основою прицілу є корпус візира, до якого за допомогою гвинтів кріпляться корпуси інших складових: оптичного блока; блока лазерного далекоміра (блок Д); блока вимірювача часових інтервалів (блок ИВИ); стабілізуючого блока; інформаційного блока лазерно-променевого каналу управління (конструктивно розташований у приладі, але входить до складу комплексу керованого озброєння); головки і пульта управління.
|
|
|
Стабілізуючий блок і пульт управління кріпляться до нижньої частини корпуса візира, а головка, блок Д та інформаційний блок – до верхньої.
Схема 1.4. Схема прицілу 1Г46
В оптичному блоці розміщені оптичні деталі візуального каналу, частина|частка| органів управління, а також електрична схема, що забезпечує роботу електромеханічних пристроїв|устроїв| і передачу електричних сигналів.
У стабілізуючому блоці (рис. 1.1) закріплені гіростабілізатор, вузол нижнього дзеркала, яким проводиться|виробляється,справляється| наведення в горизонтальний площині|плоскості|, привод верхнього дзеркала, що здійснює зв'язок гіростабілізатора із|із| дзеркалом, закріпленим у головці|голівці|, і механізми вивірювань прицілу-далекоміра по напряму|направленню| і висоті, а також електронні реле системи обігріву.
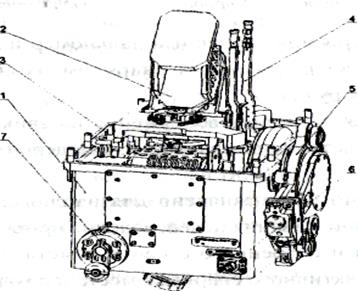
Рис. 1.1. Стабілізуючий блок виробу 1Г46:
1 – корпус; 2 – блок дзеркал; 3 – платформа; 4 – привод верхнього дзеркала;
5 – правий важіль; 6 – механізм вивіряння «Г»; 7 – рукоятка аретира «ЗАСТОП-РАССТОП»
Стабілізуючий блок (рис. 1.1) – силовий двовісний гіростабілізатор на поплавкових гіроскопах. Стабілізуючий блок спільно з головним дзеркалом головки, електроблоком і пультом управління навідника утворюють замкнутий ланцюг регулювання, що забезпечує незалежну від озброєння (гармати і спареного кулемета) стабілізацію поля зору і наведення стабілізованої лінії прицілювання в горизонтальній і поздовжньо-вертикальній площинах (в експлуатаційній документації використовуються терміни «по напряму» і «по висоті»).
|
|
|
Стабілізація поля зору по висоті відбувається за рахунок обертання навколо горизонтальної осі з допомогою головного дзеркала головки, яке кінематично пов'язане із паралелограмним приводом 4 і з платформою 3 гіростабілізатора.
Стабілізація поля зору по напряму відбувається за рахунок обертання навколо вертикальної осі блока дзеркал 2, розташованого на корпусі стабілізуючого блока, і кінематично (через вісімкообразну стрічкову передачу) пов'язаного з віссю обертання (шків 7 на рис. 1.2) зовнішньої рами гіростабілізатора. Блок дзеркал – цілісний блок із дзеркала (знизу) і світлорозподільної пластини (зверху). Стрічкова передача у вигляді вісімки виконана для забезпечення обертання блока дзеркал у бік, протилежний обертанню зовнішньої рами гіростабілізатора.
Функціонально-кінематична схема стабілізуючого блока наведена на схемі 1.5.
Двовісний гіростабілізатор – система із двох одновісних гіростабілізаторів, що мають дві взаємоперпендикулярні осі стабілізації: перша – по осі обертання внутрішньої рами (по висоті), друга – по осі обертання зовнішньої рами карданового підвісу (по напряму).
Кожен гіростабілізатор, або точніше, канал, містить чутливий елемент – поплавковий гіроскоп, датчик кута прецесії, датчик моменту, підсилювач, двигун стабілізації.
Рама двовісного гіростабілізатора (стабілізуючого блока) – стабілізована відносно двох осей платформа 3 (рис. 1.2), виконана у вигляді прямокутного паралелепіпеда. На платформі (конкретніше, в корпусі платформи 3) встановлено два двоступеневі поплавкові гіроскопи 2 і 4 таким чином, що в початковому (зааретованому) положенні гіростабілізатора вісь чутливості (вимірювальна вісь) кожного гіроскопа паралельна певній осі карданового підвісу гіростабілізатора.
Віссю чутливості двоступеневого поплавкового гіроскопа є вісь, перпендикулярна вісям ротора (головна вісь гіроскопа, по якій направлений вектор власного кінетичного моменту Н) і камери (поплавка). При цьому вектори власних кінетичних моментів (Н) двоступеневих поплавкових гіроскопів 2 і 4 направлені назустріч один одному.
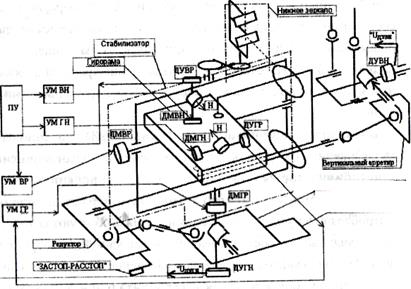
Схема 1.5. Функціонально-кінематична схема стабілізуючого блока 1Г46
Гіроскоп 2 є чутливим елементом каналу стабілізації по осі обертання зовнішньої рами карданового підвісу гіростабілізатора (по напряму), тобто забезпечує стабілізацію поля зору і наведення лінії прицілювання в горизонтальній площині, у зв'язку з чим в позначенні його елементів, так само як і елементів каналу стабілізації, присутня буква «Г» (ДУГН, ДМГН тощо). Гіроскоп 4 є чутливим елементом каналу стабілізації по осі обертання внутрішньої рами (платформи), яка на схемі (схема 1.5) називається «гірорама», тобто забезпечує стабілізацію поля зору і наведення лінії прицілювання по висоті (у поздовжньо-вертикальній площині), у зв'язку з чим в позначенні його елементів і елементів каналу стабілізації присутня буква «В» (ДУВР, ДМВН тощо).
Кожен із гіроскопів має датчик кута процесії, який через свій канал підсилювача стабілізації електрично пов'язаний з керуючими обмотками двигуна стабілізації по осі, яка збігається з віссю чутливості даного гіроскопа.
Відповідно до функціонально-кінематичної схеми (схема 1.5) канал стабілізації по напряму (горизонталі) включає датчик кута процесії поплавкового гіроскопа 2 (рис. 1.2) – ДУГР (датчик кута горизонтального розвантаження – позначення елементів згідно з експлуатаційною документацією), підсилювач розвантаження – УМГР (підсилювач потужності горизонтального розвантаження) і двигун стабілізації – ДМГР (моментний двигун горизонтального розвантаження).
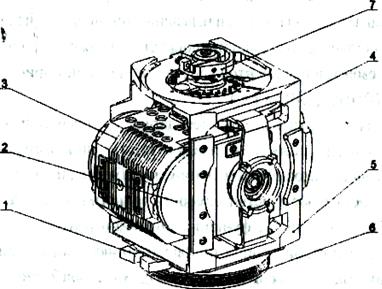
Рис. 1.2. Рама із платформою гіростабілізатора прицілу 1Г46:
1 – кулачок аретира (по Г); 2 – гіроскоп ГН; 3 – корпус платформи; 4 – гіроскоп ВН;
|
|
|
5 – корпусу зовнішньої рами; 6 – ротор ДМГР (АДФМ-1000); 7 – шків стрічкової передачі
Канал стабілізації по висоті (поздовжньо-вертикальна площина) включає датчик кута процесії поплавкового гіроскопа 4 (рис. 1.2) – ДУВР (датчик кута вертикального розвантаження), підсилювач розвантаження – УМВР (підсилювач потужності вертикального розвантаження) і двигун стабілізації – ДМВР (моментний двигун вертикального розвантаження). Підсилювачі розвантаження УМГР і УМВР знаходяться в електроблоці прицілу.
Наведення лінії прицілювання (візування) по висоті і напряму здійснюється за допомогою пульта управління – ПУ. Наведення по висоті проводиться розворотом рукояток пульта управління навколо горизонтальної осі («на себе», «від себе»), а наведення по напряму – розворотом всього пульта управління навколо вертикальної осі (за ходом годинникової стрілки та проти ходу годинникової стрілки).
При цьому обертаються розташовані в пульті управління потенціометри, від величини кута повороту яких залежать значення електричних сигналів, що поступають на відповідні підсилювачі наведення – УМВН (підсилювач потужності вертикального наведення) і УМГН (підсилювач потужності горизонтального наведення), що знаходяться у складі електроблока прицілу. Підсилені у відповідних підсилювачах електричні сигнали наведення поступають на обмотки управління датчиків моменту – ДМВН (моментний двигун вертикального наведення), що знаходиться на осі процесії поплавкового гіроскопа 4 (рис. 1.2) і ДМГН (моментний двигун горизонтального наведення), що знаходиться на осі процесії поплавкового гіроскопа 2 (рис. 1.2).
З осями карданового підвісу гіростабілізатора пов'язані ротори датчиків кутів наведення лінії прицілювання (візування). На осі обертання зовнішньої рами знаходиться ротор датчика кута горизонтального наведення – ДУГН, статор якого пов'язаний із корпусом стабілізуючого блока, а через нього і корпус приладу – з баштою танка. На горизонтальній осі обертання платформи (гірорами) знаходиться ротор датчика кута вертикального наведення – ДУВН, статор якого встановлений у корпусі правого важеля 5 (рис. 1.1), який через паралелограмний привод пов'язаний із гарматою.
|
|
|
Вказані датчики виробляють електричні сигнали Uдугн і Uдувн, пропорційні кутам розузгодження між лінією прицілювання (візування) і віссю каналу ствола гармати в горизонтальній і поздовжньо - вертикальній площинах.
Ці сигнали через ланцюги комутації поступають на суматор танкового балістичного обчислювача, де підсумовуються (з урахуванням фази) з виробленими електричними сигналами Uβ і Uа, щопропорційні кутам упередження (β) і прицілювання (а).
Як чутливі елементи даного двовісного гіростабілізатора, використані двоступеневі поплавкові гіроскопи. Елементи комплектації: гіромотор ГМА-4 застосований в якості датчика кута процесії, індукційний датчик типу 15Д-32 – датчик моменту (двигуна наведення), моментний двигун змінного струму АДФМ-250. Таким чином, елементами, позначеними на схемі 1.5 ДУВР і ДУГР, є індукційні датчики 15Д-32. Вони ж застосовані як датчики кутів наведення лінії прицілювання ДУВН і ДУГН.
ДМВН і ДМГН є двигуни наведення АДФМ-250, а векторами Н позначені напрями власних кінетичних моментів роторів гіромоторів ГМА-4, що знаходяться в камерах (поплавках).
В якості безредукторного двигуна стабілізації ДМГР, який встановлений на осі зовнішньої рами карданового підвісу гіростабілізатора, застосовується двофазний асинхронний моментний двигун змінного струму АДФМ-1000. Його ротор 6 (рис. 1.2) пов'язаний із корпусом 5 зовнішньої рами, а статор встановлений у днищі корпуса 1 (рис. 1.1) стабілізуючого блока.
В якості безредукторного двигуна стабілізації ДМВР, який встановлений на осі внутрішньої рами (платформи) карданового підвісу гіростабілізатора, застосовується двофазний асинхронний моментний двигун змінного струму АДФМ-800. Його ротор пов'язаний із платформою, а статор встановлений у корпусі правого важеля 5 (рис. 1.1).
Процеси стабілізації поля зору і стабілізованого наведення лінії прицілювання 1Г46, пов'язані із стабілізацією платформи і її стабілізованими поворотами в горизонтальній і поздовжньо-вертикальній площинах, принципово такі ж самі, що і в одновісьовому гіростабілізаторі на поплавковому гіроскопі.
Розглянемо, як відбувається стабілізація по осі зовнішньої рами, тобто стабілізація поля зору по напряму. При появі початкового моменту відносно осі зовнішньої рами процесує гіровузол (поплавок) поплавкового гіроскопа 2 (рис. 1.2), і датчик кута процесії ДУГР видає сигнал керування на підсилювач УМГР. З виходу підсилювача напруга поступає на керуючі обмотки двигуна стабілізації ДМГР, який розвиває момент, протилежний по напряму і рівний по величині початковому моменту.
Аналогічно відбувається стабілізація поля зору по висоті. При цьому задіяний ланцюжок ДУВР-УМВР-ДМВР.
Наведення стабілізованої лінії прицілювання (візування) 1Г46 по напряму, тобто стабілізований поворот платформи (разом із зовнішньою рамою карданового підвісу) по горизонталі здійснюється двигуном наведення (датчиком моменту) ДМГН при подачі на його обмотку керуючого електричного сигналу з підсилювача наведення УМГН. Виникаючий при цьому відносно осі процесії (паралельній осі внутрішньої рами гіростабілізатора) поплавкового гіроскопа 2 (рис. 1.2) електромагнітний момент визначає величину і напрямок кутової швидкості повороту (процесії) платформи навколо вертикальної осі (по горизонталі).
Наведення стабілізованої лінії прицілювання (візування) по висоті відбувається аналогічним чином, але сигнал із підсилювача наведення УМВН поступає на двигун наведення ДМВН, який створює момент відносно осі процесії (паралельній осі зовнішньої рами гіростабілізатора) поплавкового гіроскопа 4 (рис. 1.2).
Цей момент викликає процесійний рух внутрішньої рами (платформи) карданового підвісу гіростабілізатора навколо своєї (горизонтальної) осі, тобто відбувається поворот платформи у вертикальній площині (по висоті).
При повороті корпуса пульта управління навколо вертикальної осі за або проти ходу годинникової стрілки до кутів 25-27° відносно середнього (нульового) положення, а рукояток пульта управління навколо горизонтальної осі (на себе або від себе) до кутів 27-29° відносно середнього положення, відбувається плавна зміна кутової швидкості наведення стабілізованої лінії прицілювання по напряму і по висоті від 0,05 до 1 °/с. Зі збільшенням вказаних кутів відбувається стрибкоподібна зміна кутової швидкості наведення лінії прицілювання по напряму і висоті до значення максимальної кутової швидкості наведення 3°/с. При подальшому повороті корпуса (рукояток) пульта управління до упорів ланцюги наведення електроблока формують електричний сигнал «27В Переброс», і відбувається стрибкоподібна зміна кутової швидкості наведення стабілізованої лінії прицілювання до швидкості перекидання 16-24°/с.
При повороті корпуса пульта управління до упорів пороговий пристрій у складі електроблока виробляє електричний сигнал «27В Переброс», по якому на вхід підсилювача УМГР подається додатковий електричний сигнал, який після посилення поступає на ДМГР. ДМГР створює по осі зовнішньої рами карданового підвісу гіростабілізатора момент, під дією якого гіровузол (поплавок) поплавкового гіроскопа 2 (рис.1.2) відхиляється (процесує) у бік одного із двох підпружинених упорів у корпусі поплавкового гіроскопа. ДУГР при цьому видає електричний сигнал, що дорівнює додатковому, але зворотний по фазі. При зрівнюванні на вході УМГР додаткового сигналу і сигналу ДУГР момент ДМГР знімається, і гіровузол (поплавок) поплавкового гіроскопа 2 сприймає вплив пружної сили стисненої пружини одного з упорів. Вказана дія викликає появу гіроскопічного моменту, який прикладений до корпуса поплавкового гіроскопа 2, тобто проявляється у вигляді пари сил, прикладених до підшипників опори гіровузла поплавкового гіроскопа 2 (рис. 1.2). Дана пара сил прагне обертати корпус поплавкового гіроскопа, що призводить до обертання (повороту) платформи, в якій він встановлений, навколо вертикальної осі, тобто навколо осі зовнішньої рами. Через вісімкообразну стрічкову передачу вказаний поворот платформи (разом із зовнішньою рамою) передається на блок дзеркал 2 (рис. 1.1), що призводить до переміщення по горизонталі (по напряму) стабілізованої лінії прицілювання (візування) прицілу 1Г46 зі швидкістю перекидання.
У стабілізуючому блоці також розташовані рукоятка 7 «ЗАСТОП – РАССТОП» (рис. 1.1) привода аретувального пристрою і механізми вивіряння лінії прицілювання по висоті і напряму (на рис. 1.1 видно механізм вивіряння 6 по напряму (Г). За прийнятою класифікацією стабілізуючий блок є аретувальним пристроєм суміщеної дії з ручним управлінням.
Аретування платформи (за схемою 1.5 – гірорами) проводиться для забезпечення жорсткого зв'язку платформи і, відповідно, лінії прицілювання приладу з гарматою і баштою танка при її узгодженому положенні. Для аретування платформи на її осях обертання (власна вісь обертання – горизонтальна, вісь зовнішньої рами – вертикальна) є кулачки із спеціальним профілем і пазом (на рис. 1.2 видно кулачок 1 аретира по напряму (Г), механізми вертикального і горизонтального аретирів (схема 1.5), штоки яких у момент аретування заходять у пази відповідних кулачків.
Шток кожного аретира висувається при повороті рукоятки 7 «ЗАСТОП –РАССТОП» (рис. 1.1). При повороті рукоятки обертальний рух передається через зубчастий редуктор (схема 1.5) та карданні валики і відповідним важелем кожного аретира перетворюється на поступальний рух штока.
Вертикальний аретир через механізм вивіряння лінії прицілювання по висоті і паралелограмний привод жорстко пов'язаний із гарматою.
При зааретованому положенні платформи лінія прицілювання 1Г46 жорстко пов'язана паралелограмним приводом із гарматою.
Горизонтальний аретир через механізм вивіряння лінії прицілювання по напряму (Г) жорстко пов'язаний із корпусом стабілізуючого блока, а отже – з баштою танка.
Механізмами вивіряння лінії прицілювання приладу по висоті і напряму проводиться компенсація розузгодження лінії прицілювання з віссю каналу ствола гармати, що виникає після монтажу 1Г46 у танк і в процесі експлуатації.
Мета вивірянь (узгодження) – розвороти головного дзеркала головки і нижнього дзеркала (блока дзеркал) стабілізуючого блока досягається розворотом зааретированої платформи (гірорами) по горизонталі і по висоті. Для цього механізми вертикального і горизонтального аретирів встановлені не безпосередньо в корпусах правого важеля 5 і стабілізуючого блока 1 (рис. 1.1), а на поворотних кронштейнах, які провертаються при обертанні ключем вивіряння відповідного механізму.
До складу кожного механізму вивіряння входить черв'ячна передача, черв'ячне колесо якої має ексцентриковий поводок.
При обертанні черв'ячного колеса ексцентриковий поводок розвертає кронштейн з механізмом відповідного аретира.
Двовісний гіроскопічний стабілізатор 1Г46 забезпечує незалежну від озброєння стабілізацію поля зору і наведення стабілізованої лінії прицілювання в діапазоні кутів від -15° до +20° у поздовжньо-вертикальній площині, і від -8° до +8° у горизонтальній площині (по напряму).
Похибка стабілізації лінії прицілювання (візування) при русі танка по пересіченій місцевості не перевищує 0,7 кутових хвилин (0,2 мрад), а кутова швидкість відходу лінії прицілювання (центральної прицільної марки) при стабілізованому спостереженні в умовах коливання танка на пересіченій місцевості не перевищує 0,7°/хв.
Пульт управління задає напрям|направлення| і швидкість наведення лінії візування в просторі. На рукоятках пульта розташовані|схильні| кнопки: вимірювання|виміри| дальності, пострілу з|із| гармати і пострілу з|із| кулемета.
Блок Д призначений для формування і видачі імпульсу випромінювання передавача і прийому імпульсу, відбитого від цілі. |цілі|
Блок ИВИ| призначений для перетворення інтервалу часу (між імпульсом передавача й імпульсом, відбитим від цілі|цілі|) на код дальності.
У блок ИВИ| також входить цифровий індикатор, який дозволяє навіднику одночасно з ціллю|ціллю| бачити виміряну|виміряну| дальність у метрах. Спостереження за полем бою і прицілювання здійснюються через візуальний канал приладу наведення прицілу-далекоміра.
Для зручності спостереження візуальний канал має плавну зміну кратності збільшення, окуляр, що має діоптрійне наведення по оку спостерігача. Крім того, у полі зору прицілу-далекоміра може вводитися|запроваджуватися| світлофільтр, що оберігає|запобігає| око спостерігача від сонячного і лазерного випромінювання.
Дальність до вибраної цілі|цілі| вимірюється прицілом-далекоміром. Управління ведеться від кнопки на рукоятці пульта управління. Часовий інтервал між моментом випромінювання передавача й імпульсом, відбитим від цілі|цілі|, перетвориться вимірювачем тимчасових інтервалів (блоком ИВИ|) для введення в балістичний обчислювач і для висвічування дальності у полі зору навідника.
У режимі «Аварійний», коли не працює балістичний обчислювач, дальність вводиться|запроваджується| вручну|вручну| переміщенням сітки з|із| прицільними шкалами і шкалою бічних|бокових| поправок від маховичка| пульта управління.
Поділка |поділка,розподіл,поділ|шкали дальності вибраного снаряда, відповідає її виміряній|виміряній| дальності, підводиться до горизонтального штриха нерухомої сітки.
Прицілювання проводиться|виробляється,справляється| поєднанням|сполученням| із ціллю перетину| вертикального штриха з|із| горизонтальним штрихом шкали бічних|бокових| поправок.
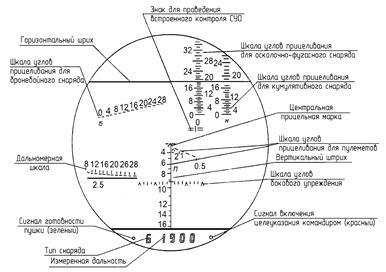
Вигляд поля зору прицілу показаний на рис. 1.3.
У центрі поля зору знаходиться центральна прицільна марка у вигляді косинця.
Вниз від центральної прицільної марки йде вертикальний штрих із поділками – шкала кутів прицілювання для кулемета.
Від центральної прицільної марки вправо відходить крива штрихова лінія з поділками, що є також шкалою прицілювання для кулемета, враховує базу установки кулемета щодо прицілу на танку по висоті і напряму.
Ціна одної малої поділки шкали відповідає дальності 100м, цифри відповідають дальностям у сотнях метрів.
У боки від центральної прицільної марки йдуть шкали кутів бічного упередження, що складаються зі штрихів і косинців для прицілювання при стрільбі з бічним упередженням у разі відсутності автоматичного вироблення його в системі.
У верхній частині поля зору розташовані:
горизонтальний штрих і прицільні шкали для кожного типу снаряда (бронебійного – Б, осколково-фугасного – О, кумулятивного – К).
Ціна однієї малої поділки – 200 м для бронебійного і 100 м – для решти типів снарядів. Цифри відповідають дальності в сотнях метрів.
Зліва від вертикального штриха розташована далекомірна шкала з базою по цілі 2,5 м.
У нижній частині поля зору розташовані світлоіндикатори: зліва зелений – сигнал готовності гармати до стрільби; справа червоний – сигнал цілевказання, дубльованого управління командиром або ввімкнення тумблера «АВАРИЙНЫЙ ПОВОРОТ» механіком-водієм.
У центрі нижньої частини поля зору висвічується тип снаряда та виміряна дальність.
При роботі прицілу в аварійному режимі (ручне введення дальності обертанням маховичка пульта управління) шкали кутів прицілювання, а також шкала кутів бічного упередження, розташовані на рухомій сітці, переміщаються у полі зору прицілу відносно нерухомих горизонтального штриха і центральної прицільної марки.
|
| Рис. 1.3. Вигляд поля зору прицілу навідника 1Г46 |
При цьому точка перетину горизонтального штриха шкали кутів бічного упередження з вертикальним штрихом утворюють точку наведення при стрільбі з гармати.
З урахуванням кутів бічного упередження точка наведення переноситься на відповідний штрих або косинець шкали кутів бічного упередження.
Органи управління, сигналізації і регулювання прицілу 1Г46
На прицілі (рис. 1.4, 1.5, 1.6) розташовані:
- індикатор 13 «ОБОГРЕВ ОКУЛЯРА», що сигналізує про ввімкнення обігріву окуляра;
- індикатор 15 «РАССТОП», що сигналізує про розстопорення гірорами стабілізуючого блока;
- маховичок 12 «ПОДСВЕТКА СЕТКИ» для регулювання підсвітки шкал і сіток у полі зору прицілу при поганій освітленості;
- тумблер 16 «КОНТРОЛЬ Д» для ввімкнення режиму контролю далекоміра. Тумблер вмикається тільки після відкриття кришки «КОНТРОЛЬ Д»;
- тумблер 18 «ОБОГРЕВ ГОЛОВКИ» для ввімкнення обігріву захисних стекол головки прицілу. При його ввімкненні вмикається індикатор 17 «ОБОГРЕВ ГОЛОВКИ»;
- кришка 19 «КОНТРОЛЬ ЦЕПЕЙ Д», якою закриваються тумблер 21 «ПОРОГ-РАБОТА» і резистор 20 «РАБ. НАПР», для регулювання робочої напруги;
- втулка 1 «Г» для вивіряння далекоміра в горизонтальній площині;
- втулка 2 «В» для вивіряння далекоміра у вертикальній площині;
Рис. 1.4. Приціл навідника (лицьова панель):
1 – втулка «Г» вивіряння по напряму; 2 – втулка «В» вивіряння по висоті;
3 – рукоятка; 4 – вологопоглинач; 5 – окуляр; 6 – кришка контрольного роз’єму Ш16;
7 – рукоятка «БАЛЛИСТИКА»; 8 – кнопка «МЗ»; 9 – маховичок ручного введення дальності; 10 – пульт управління; 11 – кнопка проведення виміру дальності; 12 – маховичок
«ПОДСВЕТКА СЕТКИ»; 13 – світлодіод «ОБОГРЕВ ОКУЛЯРА»; 14 – рукоятка
«УВЕЛИЧЕНИЕ»; 15 – світлодіод «РАССТОП»; 16 – тумблер «КОНТРОЛЬ Д»;
17 – світлодіод «ОБОГРЕВ ГОЛОВКИ»; 19 – кришка «КОНТРОЛЬ ЦЕПЕЙ»;
20 – резистор «РАБОЧЕЕ НАПРЯЖЕНИЕ»; 21 – тумблер «ПОРОГ– РАБОТА»
Рис. 1.5 Приціл навідника (вигляд зліва):
1,5,11 – вологопоглинач; 2 – редуктор вивіряння УВКВ; 3 – головка; 4 – блок Д;
6 – освітлювач «ПОДСВЕТКА СЕТКИ»; 7 – гайка діоптрійного наведення; 8 – налобник;
9 – кнопка стрільби з кулемета; 10 – рукоятка кратності; 12 – рукоятка світлофільтра;
13 – рукоятка аретира «ЗАСТОП - РАССТОП»; 14 – освітлювач підсвітки плівки
Рис. 1.6. Приціл навідника (вигляд справа):
1 – вологопоглинач; 2 – ричаг привода призми; 3 – важіль; 4 – рукоятка;
5 – втулка «ВЫВЕРКА В»; 6 – втулка «ВЫВЕРКА Г»; 7 – кнопка стрільби з гармати;
8 – плавка вставка Пр2; 9 – плавка вставка Пр1
- рукоятка 3 для закріплення налобника;
- перемикач 7 «БАЛЛИСТИКА» для вибору необхідного типу балістики;
- кнопка 8 «МЗ» для ввімкнення циклу автоматичного заряджання гармати;
- маховичок 9 для ручного введення дальності;
- кнопка 11 для вимірювання дальності (на лівій рукоятці пульта управління 10).
На правому боці розташовані:
- кнопка для стрільби з гармати (на правій рукоятці пульта управління);
- втулка «ВЫВЕРКА В» для вивіряння лінії візування прицілу з віссю каналу ствола гармати у вертикальній площині;
- втулка «ВЫВЕРКА Г» для вивіряння лінії візування прицілу з віссю каналу ствола гармати в горизонтальній площині.
На лівому боці розташовані:
- рукоятка «СВЕТОФИЛЬТРЫ» для ввімкнення світлофільтрів;
- ручка «УВЕЛИЧЕНИЕ» для плавної зміни збільшення візира;
- кнопка для стрільби з кулемета (на лівій рукоятці пульта управління);
- освітлювач «ПОДСВЕТКА ПЛЕНКИ» для підсвітки пропалення на плівці вбудованого коліматора;
- рукоятка «ЗАСТОП-РАССТОП» для розстопорювання стабілізатора прицілу і ввімкнення стабілізатора озброєння танка.
При розстопорюванні стабілізатора вмикається індикатор 15 (рис. 1.4) «РАССТОП».








