 2015-09-06
2015-09-06 4869
4869Автоматические мосты. Мосты с автоматизированным процессом уравновешивания называются автоматическими мостами; они находят широкое применение для непрерывных показаний и регистрации измеряемых величин. Автоматические мосты с дополнительным регулирующим устройством применяются для автоматического управления производственными процессами. В настоящее время широко распространены автоматические мосты для измерения, регистрации и регулирования температуры различных объектов. В качестве измерительного преобразователя температуры в электрическое сопротивление в этих мостах применяются термометры сопротивления.
В автоматических потенциометрах используется компенсационная мостовая измерительная схема. Напряжение, компенсирующее измеряемую термо - Э.Д.С. термоэлектрического термометра - термопары, в этой измерительной схеме получается как разность потенциалов в двух точках. Потенциал одной из этих точек определяется положением движка реохорда, а потенциал другой зависит от температуры свободных концов термометра. Это дает возможность осуществлять автоматическое введение поправки на изменение термо - Э.Д.С. термопары, вызванное отклонением температуры свободных концов ее от 0° С.
Для измерения потенциометром постоянного тока Ех необходимо установить рабочий ток и подобрать такие значения сопротивлений на декадах потенциометра, при которых "гальванометр отметит отсутствие тока, т. е. осуществить компенсацию Ех. Процессы установки рабочего тока и комп  енсации Ех могут быть автоматизированы, что упрощает пользование прибором, упрощает процесс измерения Ех и, позволяет непрерывно регистрировать значения измеряемой величины.
енсации Ех могут быть автоматизированы, что упрощает пользование прибором, упрощает процесс измерения Ех и, позволяет непрерывно регистрировать значения измеряемой величины.
Потенциометры постоянного тока, у которых установка рабочего тока и процесс компенсации Ех производятся автоматически, называются автоматическими потенциометрами постоянного тока.
Автоматические потенциометры применяются для измерения электрических и неэлектрических величин, которые могут быть предварительно преобразованы в напряжение или э. д. с. постоянного тока.
Процесс уравновешивания в автоматических потенциометрах может осуществляться как непрерывно (потенциометры со следящей системой уравновешивания), так и периодически (потенциометры с развертывающим уравновешиванием или динамической компенсацией). Чаще всего применяются потенциометры с непрерывным уравновешиванием. Они в свою очередь могут быть разделены на две группы: потенциометры с полным уравновешиванием, или с астатической характеристикой, и потенциометры с неполным уравновешиванием, или со статической характеристикой.
В настоящее время выпускаются автоматические потенциометры с полным уравновешиванием различных типов и форм записи. Запись измеряемой величины производится на дисковой диаграмме или на диаграммной ленте*.
 Автоматические потенциометры переменного тока. Автоматические потенциометры переменного тока в работе значительно удобнее потенциометров с ручным уравновешиванием, и область их применения более широкая, так как они позволяют производить непрерывные точные измерения Ux. Автоматические потенциометры, как и ручные, могут быть полярнокоординатными и прямоугольно-координатными.
Автоматические потенциометры переменного тока. Автоматические потенциометры переменного тока в работе значительно удобнее потенциометров с ручным уравновешиванием, и область их применения более широкая, так как они позволяют производить непрерывные точные измерения Ux. Автоматические потенциометры, как и ручные, могут быть полярнокоординатными и прямоугольно-координатными.
5. Методика расчета измерительной схемы электронного автоматического моста
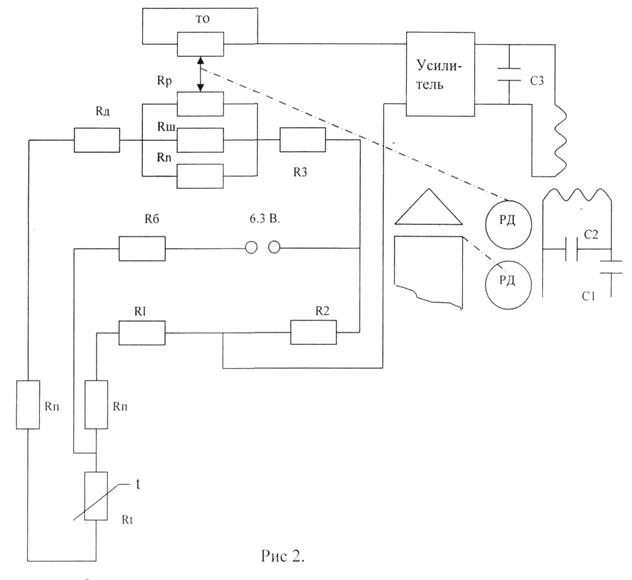
Термометр сопротивления (его сопротивление Rt) включается в измерительную мостовую схему автоматического уравновешенного моста по трехпроводной схеме включения (см. рис.1). Это делается для того, чтобы можно было компенсировать влияние изменения сопротивления соединительных проводов на точность измерения температуры теплового объекта при отклонениях температуры окружающей соединительные провода среды. В измерительную схему моста кроме сопротивления Rt входят:
Rji - сопротивление соединительных проводов и подгоночных катушек равное обычно для одной линии - 2,5 Ом;
Rд - сопротивление, определяющее начало шкалы (имеющее подгоночное сопротивление в виде спирали гд, являющееся частью сопротивления Ra), его выбирают согласно паспортным данным электронных автоматических мостов равным 3,7-5,5 Ом;
Rl, R2, R3 - расчетные резистивные сопротивления;
Re - балластное сопротивление в цепи источника питания, которое служит для ограничения тока в плечах измерительной схемы;
В схеме измерения имеется также р  охорд, который с помощью своего подвижного контакта, связанного с ротором реверсивного двигателя, делится на две части, одна из которых Rip относится к левой части реохорда, а другая R2p -к правой его части. Вместе обе части реохорда составляют его полное сопротивление Rp = Rip +R2p
охорд, который с помощью своего подвижного контакта, связанного с ротором реверсивного двигателя, делится на две части, одна из которых Rip относится к левой части реохорда, а другая R2p -к правой его части. Вместе обе части реохорда составляют его полное сопротивление Rp = Rip +R2p
Параллельно реохорду включаются два резистивных сопротивления — сопротивление шунта Rui и сопротивление Rn, определяющее верхний предел изменения сопротивления датчика температуры (или шкалы прибора). Эквивалентное сопротивление для двух указанных сопротивлений будем обозначать Rmn. Оно будет равно:
Ruin = Rin*Rn/(Rin+Rn)
 Совместно сопротивления Rnin, Rip и R2p оказываются включенными по отношению к внешним выводам по схеме треугольника.
Совместно сопротивления Rnin, Rip и R2p оказываются включенными по отношению к внешним выводам по схеме треугольника.
Для расчета режимов измерения работы мостовой схемы такое включение указанных трех сопротивлений является неудобным. Поэтому целесообразно от реальной схемы включения этих сопротивлений перейти к эквивалентной расчетной схеме их включения «звездой», в которой будут фигурировать сопротивления: с левой стороны Rlnp, с правой стороны R2np и в ветви, относящейся к сопротивлению измерительной диагонали моста (дополнительному сопротивлению нагрузки), RhcI.
 Принемаем для расчета Rл = 2.5 Ом
Принемаем для расчета Rл = 2.5 Ом
Яд=4,3 Ом
R2 = R3 = 300 Ом
RB = 450 Ом
По градуировочной таблице определяем
Rtmax = 68,81 Ом; Rtmin = 53 Ом;
Определяем Rnp, Rl, Rn;
Rпр= 0.5*(-А)+ÖА2+В/ 1-l
где, А = (Rtmm + (Ял + RH + R3) * (1 - 2 * l))- {Rtmax + Rtmin) * l
A = (53 + (2,5 + 4,3 + 300) * (1 - 2 * 0,032)) - (57,52 + 68,81 ) * 0,032 =375,25
В = 4* (68,81 - 53) * 300 * (1 - 2 * 0,032) = 177577 Ом
Rпр ={0.5*(-375.25+Ö375.252+177577)}/1-0.032 =100.96Ом
R1= [{(R1min +Rл + Rд + Rпр (1-l))* R2}/ (Rпр*l+ R3)}]- Rл
R1=[{(53 + 2.5 + 4.3 + 100.96*(1-0.032))*300}/100.96*0.032+300]-2.5 = =153.35Ом
Rп =(Rри* Rпр) / (Rри+ Rпр)
Rп = (90*100.96) / (90+100.96) =47.58 Ом
Определяем Un
Uп = U0 /[1+{ R 5/(Rл + R 1+ R 2)}+ +{ R 5/(Rл + Rд+ R lmin+ Rпр+ R 3)}]
Uп=6.3[1+{450/(2.5+153.35+300)}+{450/(2.5+4.3+53+100.96+300)}] =2.12B
Затем находим соответствующее значение тока в цепи реохорда при Rt = Rtmax:
IRmin= U0 /(R3+Rпр+ Rд+ Rл+ R1min )
IRmin =2.12/(300+100.96+4.3+2.5+53) = 4.6*10-3 A
4.6*10-3 £ 5…7*10-3 
Неравенство выполняется. Аналогично находим значение тока в цепи включения реохорда при Rt = Rtmax
Uп = U0 /[1+{ R 5/(Rл + R 1+ R 2)}+ +{ R 5/(Rл + Rд+ R lmax+ Rпр+ R 3)}]
Uп=6.3[1+{450/(2.5+153.35+300)}+{450/(2.5+4.3+68.81+100.96+300)}]= =2.18B
IRmax= Uп /(R3+Rпр+ Rд+ Rл+ R1max )
IRmax =2.18/(300+100.96+4.3+2.5+68/81) = 4.5*10-3 A
Определяем отношение токов при Rt = Rtmax к Rt = Rtmin;
IRmax / IRmin =4.5* 10-3 /4.6*10-3 = 0.98
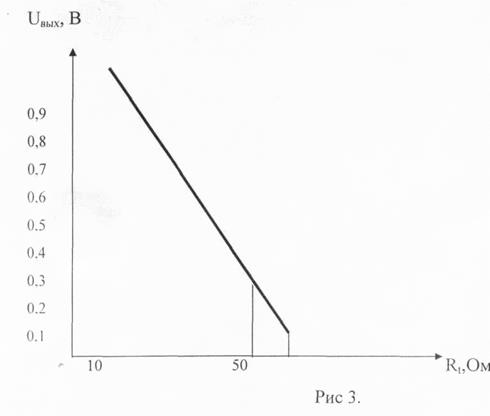
Сравниваем это значение с предельно допустимым равным 0,8..0,9. Расчетное значение должно быть больше. В нашем случае условие выполняется, поэтому можно полученные расчетные значения считать найденными. Остается для порядка проверить градуировку шкалы, например при 20,40,60,80 градусах. Для этого рассчитываются значения UBbIX при указанных значениях температуры, определив предварительно Rt по градуировочной таблице. Далее строится график функции Uвых=f(Rt). Далее определяем динамические параметры: К1СС, Кос, К2СС.
Кос = - Rпр (1-2*l)
Кос = -100,96*(1-2*0.032) =-94.49 Ом
К2сс = 2.12 / (2.5+4.3+53+18.3+300)=5.5*10-3
Для вычисления коэффициента К1сс необходимо определить DUвых и DR.
Выберем температуру +20 и +40°С, тогда
UВых20= 0,255В; Uвых40 = 0,175В; Rt20 =57,520м; Rt40 = 62,03OM
Исходя из этого, получим:
DUBbIX= ивых4о -ивых20= 0,175-0,255 =-0,08В
DRt = Rt40 - Rt20 = 62,03-57,52 = 4,51Ом
Следовательно, будет иметь:
К1сс = DUBbIX /DR
К1сс = -0.08/4.51=- 0.018A
 |
 |








