 2015-10-14
2015-10-14 969
969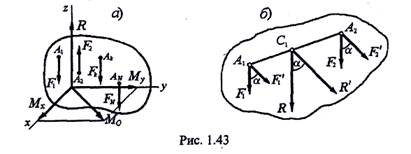 Рассмотрим систему параллельных сил (F1, F2,...FN). Примем центр приведения за начало координат, причем ось Oz направим параллельно силам. При таком выборе системы координат, главный вектор R будет расположен на оси Oz, а главный момент Мо в плоскости хОу и, следовательно, перпендикулярен главному вектору R, т.е. второй инвариант системы параллельных сил всегда равен нулю. (рис. 1.43, а).
Рассмотрим систему параллельных сил (F1, F2,...FN). Примем центр приведения за начало координат, причем ось Oz направим параллельно силам. При таком выборе системы координат, главный вектор R будет расположен на оси Oz, а главный момент Мо в плоскости хОу и, следовательно, перпендикулярен главному вектору R, т.е. второй инвариант системы параллельных сил всегда равен нулю. (рис. 1.43, а).
 Следовательно, пространственную систему параллельных сил можно привести к равнодействующей силе, паре сил, или она будет находиться в равновесии. Предположим теперь,
Следовательно, пространственную систему параллельных сил можно привести к равнодействующей силе, паре сил, или она будет находиться в равновесии. Предположим теперь,
что. В этом случае система параллельных сил всегда приводится к равнодействующей.
Рассмотрим сначала систему двух не равных по модулю параллельных сил F1 и F2. Сложив эти силы, найдем, что их равнодействующая R1.2 проходит через точку С1 которая делит отрезок А1А2, соединяющий точки приложения данных сил, на части, обратно пропорциональные силам
(1)
 Из этого равенства видно, что положение точки С1 на отрезке А1А2 не зависит от направления данных сил в пространстве. Эта точка называется центром параллельных сил F1 и F2 (рис. 1.43, б). Равнодействующую системы N параллельных сил (F1, F2... FN) можно найти так: сначала складываем две силы, например, F1 и F2, и находим их равнодействующую R1.2. Складывал затем силы R1.2 и F3, получим, что их равнодействующая R12З является одновременно равнодействующей сил F1, F2, F3 и т.д. Точки приложения С1 С2..., равнодействующих R1.2,R1.2,3 …, определяются с помощью равенств аналогичных (1).
Из этого равенства видно, что положение точки С1 на отрезке А1А2 не зависит от направления данных сил в пространстве. Эта точка называется центром параллельных сил F1 и F2 (рис. 1.43, б). Равнодействующую системы N параллельных сил (F1, F2... FN) можно найти так: сначала складываем две силы, например, F1 и F2, и находим их равнодействующую R1.2. Складывал затем силы R1.2 и F3, получим, что их равнодействующая R12З является одновременно равнодействующей сил F1, F2, F3 и т.д. Точки приложения С1 С2..., равнодействующих R1.2,R1.2,3 …, определяются с помощью равенств аналогичных (1).
|
|
|
Найденная таким образом точка С, приложения равнодействующей произвольной системы параллельных сил с фиксированными течками приложения, не зависит от направления сил в пространстве. Ее положение не изменится, если одновременно повернуть силы на один и тот же угол. Можно также пропорционально изменить модули всех сил. Точка С, через которую проходит линия действия равнодействующей системы параллельных сил, при любых поворотах этих сил около фиксированных их точек приложения в одну и ту же сторону и на один и тот же угол, называется центром параллельных сил.
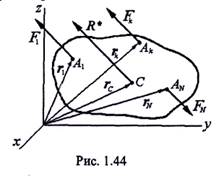 Найдем теперь координаты центра системы параллельных сил (F1 F2,...FN) (рис. 1.44). Радиус-векторы точек приложения сил обозначим через rk (k = 1, 2, 3.....N), а радиус-вектор центра параллельных сил С обозначим через rc. Выберем одно из возможных направлений параллельных сил за положительное. Единичный вектор этого направления обозначим е°, а проекции сил на направление вектора е° обозначим Fk. Тогда (2)
Найдем теперь координаты центра системы параллельных сил (F1 F2,...FN) (рис. 1.44). Радиус-векторы точек приложения сил обозначим через rk (k = 1, 2, 3.....N), а радиус-вектор центра параллельных сил С обозначим через rc. Выберем одно из возможных направлений параллельных сил за положительное. Единичный вектор этого направления обозначим е°, а проекции сил на направление вектора е° обозначим Fk. Тогда (2) 
(3)
(4)По теореме Вариньона 
Далее, используя предыдущие равенства (2) и (3), получим
(5)
или 
(6) Так как по определению центра параллельных сил соотношение (6) удовлетворяется при любом направлении единичного вектора е°, то первый множитель в равенстве (6) должен быть равен нулю, т.е.
|
|
|

 (7)
(7)
Откуда (8) Проецируя обе части этого равенства на оси координат, получаем формулы для координат центра системы параллельных сил:
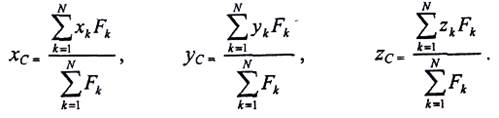 (9)
(9)








