 2015-10-16
2015-10-16 233
233> if steady(0,0,2,4,.1,1,6,4)=1 then print(`(0,0)-Steady`):else print(`(0,0)-UnSteady`):fi;
> if steady(0,6,2,4,.1,1,6,4)=1 then print(`(0,6)-Steady`):else print(`(0,6)-UnSteady`):fi;
> if steady(4,0,2,4,.1,1,6,4)=1 then print(`(4,0)-Steady`):else print(`(4,0)-UnSteady`):fi;



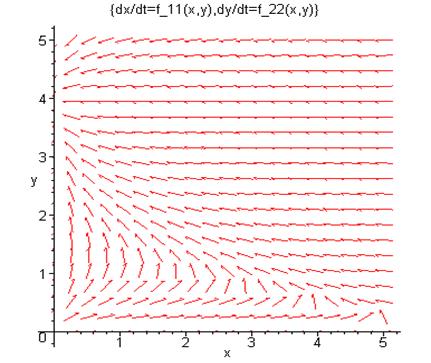
5 ШАГ. Графическое изображение поля направлений.
> dfieldplot([D(x)(t)=f_11(x,y,t),D(y)(t)=f_22(x,y,t)],[x(t),y(t)],t=-10..10,x=0..5,y=0..5,title=`{dx/dt=f_11(x,y),dy/dt=f_22(x,y)}`);
6 ШАГ. Задание задачи Коши и изображение фазового портрета. Если необходимо, данный шаг можно повторить несколько раз для разных начальных условий задачи Коши.
> phaseportrait([D(x)(t)=f_11(x,y,t),D(y)(t)=f_22(x,y,t)],[x(t),y(t)],0..10,[[x(0)=.3,y(0)=2]],stepsize=.05,scene=[x(t),y(t)],linecolour=sin(t*Pi/2),method=classical[foreuler],title=`{dx/dt=f_11(x,y),dy/dt=f_22(x,y)} {x(0)=0.3,y(0)=2}`);
7 ШАГ. График решения системы, описывающей модель, и некоторых характерных линий.
> F:=dsolve({D(x)(t)=f_11(x,y,t),D(y)(t)=f_22(x,y,t),x(0)=3,y(0)=3},{x(t),y(t)},type=numeric):
> g_1:=plots[odeplot](F,[t,x(t)],0..5,labels=[t,x],color=red):
> g_2:=plots[odeplot](F,[t,y(t)],0..5,labels=[t,y],color=blue):
> g_3:=plot(4,0..5,color=green):
> display({g_1,g_2,g_3},title=`First kind-red, second kind-blue`);
Аналогичный алгоритм применяется для остальных типов поведения прямых L_1 и L_2.
L_2(blue) целиком выше L_1(red)
(Второй вид всегда вытесняет первый)
> L_11:=plot(subs({K_1=6,a_12=4},L_1),x=0..10,y=0..10):
> L_22:=plot(subs({K_2=4,a_21=.1},L_2),x=0..50,y=0..10,color=blue):
> display({L_11,L_22},title=`Red-L_1, blue-L_2`);
> f_11:=unapply(subs({r_1=2,K_1=6,a_12=4},f_1),x,y);
> f_22:=unapply(subs({r_2=1,K_2=4,a_21=.1},f_2),x,y);
> fixed:=solve({f_11(x,y)=0,f_22(x,y)=0},{x,y});











