 2015-10-16
2015-10-16 1232
1232Дещо спрощену блок-схему мікропроцесора КР580ВМ80 (у міжнародному позначенні 8080) зображено на рис. 3.1. Це однокристальний 8-розрядний мікропроцесор, з якого розпочалася лінія Intel- мікропроцесорів.
Найважливішим елементом у схемі мікропроцесора є, мабуть,
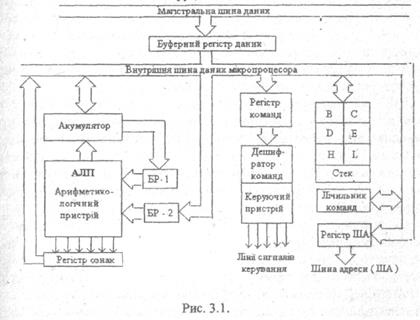
АЛЛ, який здійснює обробку інформації та є складною цифровою комбінаційною схемою, що може здійснювати багато арифметичних та логічних дій. Інформація, яка підлягає обробці (операнди), потрапляє до АЛЛ із внутрішньої ПІД, розрядність якої становить у даного мікропроцесора вісім розрядів. Однак ці операнди потрапляють до АЛЛ не безпосередньо. Перший надходить до АЛП через регістр А (акумулятор) та буферний регістр БР-1, а другий -через буферний регістр БР- 2.
Потреба в буферних регістрах обумовлена тим, що АЛЛ не містить у собі елементів пам'яті. Тому, потрапивши на його вхід вхідних даних, результат дії АЛЛ одразу з'являється на його виході. Отже, процедури введення до АЛЛ вхідних даних і виведення з нього результату повинні бути розділеними в часі: спершу до АЛЛ підводиться перший операнд, потім другий і лише після цього, коли вхідні операнди вже зняті з внутрішньої шини даних, на неї виводиться результат дії АЛЛ. Одержаний результат може бути тепер записаний до основної пам'яті ЕОМ, яка на даному рисунку не зображена.
Однак, якщо одержаний результат має бути використаний найближчим часом, його не варто засилати в основну пам'ять, а можна записати до одного з робочих регістрів (РР) мікропроцесора: В, С, D, Е, Н або L, які утворюють внутрішню швидкодіючу пам'ять мікропроцесора. Дані, записані до РР, знаходяться поруч з АЛЛ і можуть бути швидко викликані та задіяні без порівняно довгої процедури звернення до основної пам'яті.
Крім самого результату АЛЛ видає ще й відомості про його якісний характер: чи він є позитивним або негативним, чи трапилось переповнення найстаршого розряду при підсумовуванні або чи не відбулась позика з нього при відніманні тощо. Усі ці відомості передаються до регістра ознак, кожний розряд котрого (наявністю одиниці або нуля) характеризує одержаний результат за одною з перелічених ознак.
Ці відомості вельми важливі, бо, залежно від характеру результату, мікропроцесор може обрати передбачену в програмі альтернативу про шлях подальшої обробки інформації. Можливість розгалуження програми та спроможність мікропроцесора "самостійно" обирати шлях своєї подальшої роботи надає йому певну "інтелектуальність" та істотно розширює його можливості щодо обробки наданої йому інформації.
Уся робота мікропроцесора спрямовується програмою, яка записана та зберігається в основній пам'яті. За запитом мікропроцесора на його внутрішню ПІД видається з основної пам'яті чергова команда -командне слово, яке складається з чотирьох частин:
- коду операції;
- адреси першого операнда;
- адреси другого операнда;
- адреси для розташування результату.
Командне слово може бути й коротшим, коли та чи інша адреса мається на увазі за замовкання. Так, наприклад, якщо дія відбувається лише з одним операндом, командне слово може складатися лише з трьох частин. Якщо ж у операції основна пам'ять узагалі не використовується, а дія відбувається з операндами, що містяться в акумуляторі та одному з робочих регістрів, достатньо самого коду операції, в якому міститься вказівка про те, як;:й саме робочий регістр має бути задіяним.
Звернення до основної пам'яті для одержання чергової команди, даних або для запису одержаного результату здійснюється через регістр ІІІА та багаторозрядну (на 16 розрядів) ША. Сигнал, переданий по цій шині, активізує відповідну комірку пам'яті та підключає, її до ЩЦ, по якій і відбувається читання вмісту задіяної комірки або запис до неї.
Командне слово, що надходить по ЩД, сприймається регістром команд і зберігається в ньому доти, поки дешифратор команд не дешифрує його та не передасть до КП. Останній є дуже важливою частиною мікропроцесора, бо він координує та узгоджує роботу всіх його частин. КП пов'язаний з усіма функціональними блоками мікропроцесора спеціальними лініями зв'язку (на рис. 3.1 ці лінії не зображені, щоб не затемнювати його). Як апарат КП - це складний ПЗП, котрий у відповідь на дешифровану команду виробляє групу керуючих імпульсів, які він розсилає до всіх блоків мікропроцесора, активізуючи або блокуючи їх. Слід мати на увазі, що хоча кожний функціональний блок, зображений на рис. 3.1, начебто приєднаний до внутрішньої ШД, підключитися до неї він може лише при одержанні відповідного сигналу дозволу від керуючого пристрою.
Після того, як виконання чергової команди закінчено, лічильник команд (знову ж-таки за сигналом від керуючого пристрою) реєструє номер і адресу виконаної команди та формує запит до основної пам'яті на наступну команду. Звичайно адреса наступної команди одержується шляхом додавання одиниці до адреси попередк„ої. Але інколи така сувора черговість порушується та відбувається стрибок до інших адрес у полі програми. Подібний стрибок може бути заздалег'дь закладений у програму (безумовний перехід) або ж відбувається як умовний перехід, залежно від характеру одержаного результату. При цьому відповідним чином змінюється вміст лічильника команд.
Окрім керування роботою блоків самого мікропроцесора КП організовує ще й взаємодію мікропроцесора із зовнішніми пристроями. Дтя цього від КП відходять лінії сигналів керування, по яких керуючі
сигнали виходять із мікропроцесора або надходять до нього під кжнішніх пристроїв. По двох таких лінях надходять сигнали від 1 ТІ, не «ображеного на рис. 3.1. З цих тактових імпульсів КП виробляє свої керуючі імпульси, які розсилаються до всіх блоків мікропроцесора. Отже, частта тактових імпульсів задає темп роботи мікропроцесора й усіх пов'язаних із ним пристроїв. Для МП-80 мінімальний період тактових імпульсів складає 400-500 не, що відповідає тактовій частоті 2-2,5 МГц.
Інші лінії сигналів керування служать для спілкування мікропроцесора із зовнішніми пристроями. Цими пристроями можуть бути АЦП, які постачають мікропроцесорові інформацію від аналогових датчиків, пристрої магнітної пам'яті, дисплеї, принтери тощо.
По лініях керування циркулюють сигнали, за допомогою яких мікропроцесор "домовляється" із зовнішніми пристроями про обмін інформацією. Цими сигналами мікропроцесор і зовнішні пристрої повідомляють один одного про свою готовність (або неготовність) сприймати або видавати інформацію, бажання зовнішнього пристрою вступити у контакт з мікропроцесором, згоду останнього на це, підтвердження того, що мікропроцесор сприйняв або видав інформацію та багато іншого.
Для обміну інформацією мікропроцесор і зовнішні пристрої поєднані між собою магістральною ШД, до якої внутрішня шина даних підключена через буферний регістр. Цей регістр не є обов'язковим: внутрішня ПІД могла б бути безпосередньо приєднана до магістральної. Але тоді, виставивши дані на магістральну шину доводилося б щоразу чекати, поки мікропроцесор цю інформацію сприйме. Буферний регістр даних швидко знімає інформацію з магістральної шини й утримує її на внутрішній ПІД доти, поки мікропроцесор не подасть сигнал підтвердження, що цю інформацію ним сприйнято й засвоєно. Після запису в буферний регістр інформація може бути знята з магістральної ПІД Це розвантажує магістральну шину та дає змогу використовувати її для подальших актів обміну інформацією.
Для цієї ж мети передбачено й інші внутрішні буферні регістри мікропроцесора, а саме: команд, адреси пам'яті (регістр ША), буферні БР-1 і БР-2. Сприйнявши й утримуючи інформацію, вони розвантажують внутрішню ПІД і дають змогу використовувати її для передачі інших інформаційних сигналів. Це істотно збільшує швидкодію мікропроцесора й усієї мікропроцесорної системи в цілому.
Деякі особливі режими роботи мікропроцесора
Крім звичайного режиму роботи мікропроцесора, описаного вище, існують деякі особливі, за допомогою яких цей апарат спілкується із внішніми пристроями. Це режими переривання та захоплення шин. Переривання
Нехай мікропроцесор виконує задану йому (так звану фонову) програму, обробляючи дані, закладені в його основну пам'ять. Але в будь-який момент часу деякий зовнішній пристрій може зажадати уваги до себе, бажаючи, щоб мікропроцесор обробляв дані саме від нього, (таким може бути, наприклад, клавіатура, коли користувач натискає на одну з її клавіш).
Тоді зовнішній пристрій виставляє на ШК процесора сигнал запиту на переривання, тобто вимагає, щоб процесор припинив роботу з фоновою програмою та обробив би інформацію від цього зовнішнього пристою. У відповідь мікропроцесор, скінчивши виконання чергової команди фонової програми, припиняє роботу з нею та сприймає інформацію від зовнішнього пристою. У ній повинна бути вказівка на адресу підпрограми (заздалегідь закладеної в основну пам'ять машини), за якою мають оброблятися дані від зовнішнього пристрою. Мікропроцесор виконує цю підпрограму й повертається до фонової програми. На цьому процедура переривання закінчується.
Захоплення шин
Обмін інформацією зовнішнього пристрою з основною пам'яттю здійснюється, звичайно, через мікропроцесор. Але це досить повільна процедура й тому за необхідності швидкого обміну зовнішнього пристрою з основною пам'яттю великим об'ємом інформації (а це буває необхідним, наприклад, при завантаженні основної пам'яті з жорсткого диску або при запису на цей диск) бажано такий обмін здійснювати безпосередньо, обминаючи мікропроцесор. У режимі такого обміну мікропроцесор відключається, віддаючи ША та ШД зовнішньому пристрою, котрий, як то кажуть, "захоплює шини". Захоплення триває стільки часу, скільки потрібно для обміну інформацією між зовнішнім пристроєм і основною пам'яттю.
Після цього магістральна шина знову повертається в розпорядження мікропроцесора.








