 2015-10-14
2015-10-14 2176
2176В теоретической механике рассматриваются такие векторные величины как сила, моменты силы относительно точки и оси, момент пары сил, скорость, ускорение и другие.
1. Понятие вектора.
Для определенности рассматриваем прямоугольную декартову систему координат.
Вектор - это направленный отрезок, который характеризуется длиной и направлением.
Операции над векторами. Вектора можно складывать и умножать на число.
 - сумма двух векторов есть вектор
- сумма двух векторов есть вектор
α∙  - произведение вектора на действительное число есть вектор
- произведение вектора на действительное число есть вектор
 - существует нулевой вектор
- существует нулевой вектор
Рис.1
В математике все вектора являются свободными, их можно переносить параллельно самим себе.
В сумме двух векторов (рис.1, а) начало второго вектора можно поместить в конец первого вектора, тогда сумму двух векторов можно представить как вектор, имеющий начало в начале первого вектора, а конец в конце второго вектора. Применяя это правило для суммы нескольких векторов (рис.1, б) получаем, что суммой нескольких векторов является вектор замыкающий ломаную линию, состоящую из слагаемых векторов.
Операции над векторами подчиняются следующим законам (см. рис.2):



Рис.2
2. Правые и левые системы координат.
Декартовы системы координат делятся на два вида: правую и левую.
Рассмотрим декартовы системы координат на плоскости (см. рис. 3).
При повороте оси Ox правой системы координат на 90о против часовой стрелки она совпадает с осью Oy.
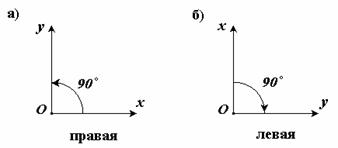
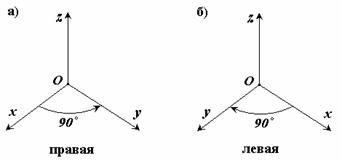
Рис.3 Рис.4
Рассмотрим декартовы системы координат в пространстве (см. рис.4).
При повороте оси Ox правой системы координат вокруг оси Oz на 900 против часовой стрелки она совпадает с осью Oy.
3. Длина, проекции и направляющие косинусы вектора.
В дальнейшем будем рассматривать правую декартову систему координат. Единичные вектора вдоль осей Ox, Oy и Oz образуют систему единичных (или базисных) векторов. Любой вектор, имеющий начало в точке O, можно представить как сумму  , числа (a x, a y, a z) - это проекции вектора
, числа (a x, a y, a z) - это проекции вектора  на оси координат (см. рис.5).
на оси координат (см. рис.5).
Рис.5
Длина (или модуль) вектора определяется формулой  и обозначается a или | |.
и обозначается a или | |.
Проекцией вектора на ось называется скалярная величина, которая определяется отрезком, отсекаемым перпендикулярами, опущенными из начала и конца вектора на эту ось. Проекция вектора считается положительной (+), если направление ее совпадает с положительным направлением оси, и отрицательной (-), если проекция направлена в противоположную сторону (см. рис.6).
Рис.6
Направляющими косинусами  вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.
вектора называются косинусы углов между вектором и положительными направлениями осей Ox, Oy и Oz соответственно.

Любая точка пространства с координатами (x, y, z) может быть задана своим радиус-вектором

Координаты (x, y, z) это проекции вектора  на оси координат.
на оси координат.
4. Скалярное произведение двух векторов
Имеется два вектора и  .
.
 ,
,
 .
.
Рис.7
Результатом скалярного произведения двух векторов и является скалярная величина (число).
Записывается как  или (, ). Скалярное произведение двух векторов равно
или (, ). Скалярное произведение двух векторов равно 
Свойства скалярного произведения:





5. Векторное произведение двух векторов
Имеется два вектора  .
.
 .
.
Рис.8
Результатом векторного произведения двух векторов является вектор  . Записывается как
. Записывается как  или [
или [  .].
.].
Векторное произведение двух векторов это вектор , перпендикулярный к обоим этим векторам, и направленный так, чтобы с его конца поворот вектора к вектору  был виден против часовой стрелки.
был виден против часовой стрелки.
Длина (или модуль) векторного произведения равна |  .
.
Свойства векторного произведения:



Векторное произведение двух векторов вычисляется через их проекции следующим образом:





Основные понятия статики
Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил.
Твердое тело. В статике и вообще в теоретической механике все тела считаются абсолютно твердыми. То есть предполагается, что эти тела не деформируются, не изменяют свою форму и объем, какое бы действие на них не было оказано. Материальной точкой будет называться абсолютно твердое тело, размерами которого можно пренебречь.
Исследованием движения нетвердых тел – упругих, пластичных, жидких, газообразных, занимаются другие науки (сопротивление материалов, теория упругости, гидродинамика и т.д.).
Под равновесием будем понимать состояния покоя тела по отношению к другим материальным телам.
Основные понятия:
1. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой.
В Международной системе единиц (СИ) силу измеряют в ньютонах (Н), килоньютонах (кН).
Сила является величиной векторной.
Ее действие на тело определяется: 1) численной величиной или модулем силы, 2) направлением силы, 3) точкой приложения силы (рис.9).
Например, будем прикладывать к стулу одну и ту же по модулю силу F. При приложении силы сверху вниз стул остается в состоянии покоя; при положении силы снизу вверх - стул поднимается; изменим направление нагружения, приложим силу горизонтально к спинке стула - стул опрокинется. Так как во всех случаях направление и место приложения силы различны, то и результат действия силы на стул разный, несмотря на то, что модуль силы F во всех случаях одинаков.
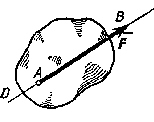
Рис.9
Силу, как и другие векторные величины, изображают в виде направленного отрезка со стрелкой на конце, указывающей его направление.
Прямая DE, вдоль которой направлена сила, называется линией действия силы.
Понятия «линия действия» и «направление» близки, но не тождественны. Очевидно, что по линии действия можно определить направление с точностью до противоположного. Аналогично связаны понятия «модуль» и «величина» для вектора.
В тексте вектор силы обозначается латинскими буквами  и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина - модуль.
| Рис. 1.2. |
2. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил.
3. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.
4. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Например, если системы сил, изображенных на рис. 9.1, а и рис. 9.1, б, уравновешены, то эти две системы сил будут эквивалентны друг другу.
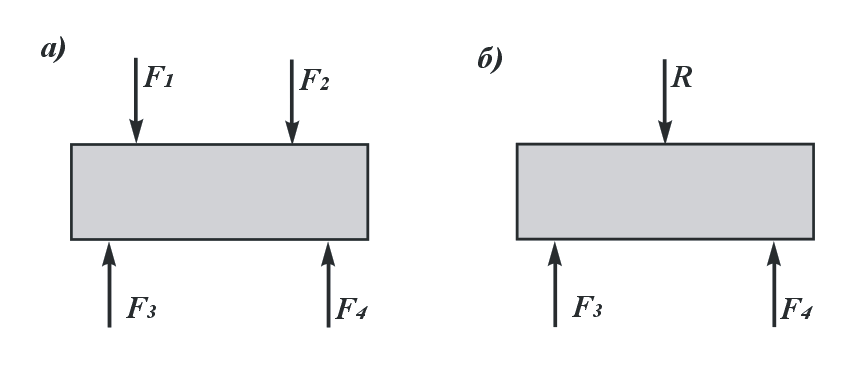
Рис.9.1. Система сил:
а – заданная система сил; б – эквивалентная система сил
5. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешеннойили эквивалентной нулю.
6. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая - это сила, которая одна заменяет действие данной системы сил на твердое тело. Так как система сил F1 и F2 эквивалентна одной силе R (рис. 9.1, б), то сила R называется равнодействующей данной системы сил. Силы F 1 и F2 в свою очередь могут называться составляющими силы R.
7. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой.
8. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга.
9. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными.
Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил.
В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела.

