 2015-10-22
2015-10-22 887
887(тарельчатым) толкателем ( рисунок 4.1, в )
Исходные данные. Линейно - убывающий закон движения толкателя (диаграмма аналога ускорения, рисунок 4.15); фазовые углы φу, φдс, φп, причем φу=φп; угол давления J = 0; ход толкателя ℓhmax; угловая скорость кулачка ω1.
Определить: ℓRоmin и построить профиль кулачка.
Решение. Особенностью данного кулачкового механизма является тот факт, что угол давления равен нулю (J = 0). Поэтому заданный закон движения ведомого звена кулачкового механизма с плоским толкателем может быть воспроизведен на практике только в том случае, если профиль кулачковой шайбы будет обязательно выпуклым и не иметь точек заострения. Условие, при котором профиль кулачка во всех точках будет выпуклым, удовлетворяется, если радиус минимальный кривизны ρmin при любом положении ведомого звена больше нуля: ρmin > 0.
Построение диаграмм, расчет масштабных коэффициентов графиков проводится аналогично п. 4.1.5. Чтобы определить минимальный радиус кулачка с плоским толкателем, необходимо построить диаграмму аналога ускорения в функции перемещения, т.е. S=f(d2S/dφ2) в масштабе µℓ (см. формулу 4.10). Откладываем по вертикали от точки О расстояние, соответствующее максимальному ходу толкателя hmax (рисунок 4.19, а). От точки 0 вверх отмечаем отрезки [0-1], [0-2] и т.д., которые соответствуют высотам h1, h2, h3 и т.д. диаграммы перемещения. Через полученные точки 1, 2, 3 и т.д. проводим горизонтальные линии, на которых откладываем значения ускорений влево при подъеме, вправо при опускании толкателя. Полученные точки соединяем плавной линией.
К отрицательной части диаграммы S=f(d2S/dφ2) (левый квадрант) проводим касательную под углом 45о до пересечения ее с осью ординат – получаем точку А'. Задаемся минимальным радиусом кривизны кулачка в пределах ρmin = 10…15 мм. Откладываем ρmin в масштабе µℓ вниз от точки А' – получаем т.А. Расстояние ОА будет являться минимальным радиусом кулачка r0. Действительное значение радиуса определится по формуле:
ℓRо = [ОА]μℓ = (м).
|
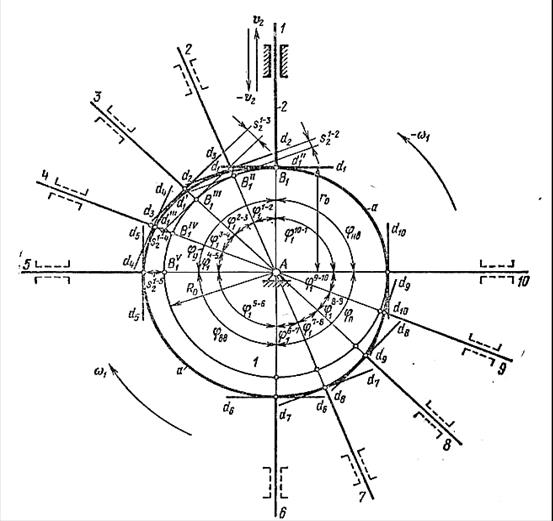
Рисунок 4.19, б - Построение профиля кулачка с плоским толкателем
Строим профиль кулачка с плоским толкателем (рисунок 4.19, б). Из произвольно выбранной точки А проводим окружности радиусом Rо. Отмечаем точку В1. От вертикальной оси в противоположную сторону вращения кулачка откладываем углы φу, φдс и φп. Делим углы φу и φп на равные части согласно диаграмме. Отмечаем точки ВII1, ВIII1, ВIV1 и т.д. и соединяем их с центром A. От полученных точек на соответствующих лучах откладываем высоты  = h1,
= h1,  = h2,
= h2,  = h3, взятые с диаграммы перемещения. Отмечаем точки d1, d2, d3 и т.д., через которые проводим перпендикуляры, означающие положение плоскости толкателя при движении кулачка относительно него. Проводим огибающую перпендикуляров, которая является профилем кулачка.
= h3, взятые с диаграммы перемещения. Отмечаем точки d1, d2, d3 и т.д., через которые проводим перпендикуляры, означающие положение плоскости толкателя при движении кулачка относительно него. Проводим огибающую перпендикуляров, которая является профилем кулачка.
Мы коротко рассмотрели синтез плоских кулачковых механизмов нескольких типов. Теперь приступим к проектированию зубчатых механизмов.
1. Назовите преимущества и недостатки кулачковых механизмов по сравнению с рычажными механизмами.
2. Дайте определение угла давления и поясните, как его изменение влияет на работу кулачкового механизма.
3. Поясните, при каких законах движения толкателя возможны удары в кулачковых механизмах?
4. Расскажите, почему в кулачковых механизмах с плоским толкателем профиль кулачка всегда должен быть выпуклым?








