 2018-01-21
2018-01-21 2255
2255
 Рис. 5.1. Конструкция РИД. Рис. 5.1. Конструкция РИД. |
 Рис. 5.2. Поперечный разрез РИД. А, В, С - зубцы соответствующих фаз статора. Рис. 5.2. Поперечный разрез РИД. А, В, С - зубцы соответствующих фаз статора. |
Реактивные индукторные двигатели (РИД, в международной классификации SRM - switched reluctant motors, принудительно переключаемые моторы) появились сравнительно недавно и сегодня получают все большее распространение. Такие двигатели имеют очень простую конструкцию (рис. 5.1, 5.2), вследствие чего они получаются дешевыми в производстве, а также надежными и требующими минимального обслуживания в эксплуатации. РИД можно назвать наиболее
универсальными, современными и перспективными электродвигателями.
РИД питаются от источника постоянного напряжения, чаще всего от выпрямителя, подключенного к промышленной сети или бортовой сети мощного транспортного средства (корабля, тепловоза, карьерного самосвала). Для управления током обмоток двигателя используют инверторы - схемы на основе транзисторов IGBT (реже - на основе выключаемых тиристоров).
То, что для работы РИД необходим довольно сложный и дорогой инвертор (как правило, с микропроцессорным управлением), является недостатком двигателя. Однако, это определяет и его преимущества - возможность очень гибкого управления, обеспечивающего регулировку момента и скорости в любых режимах работы, а также очень высокий к.п.д. (больше 90%). РИД не имеют подвижных контактов и свободны от связанных с ними проблем (искрения, износа и необходимости частого обслуживания). РИД могут работать и в генераторном режиме.
К недостаткам РИД можно отнести еще то, что его обмотки потребляют ток в импульсном режиме, и приходится принимать специальные меры, чтобы мощные импульсы тока не проникали в питающую сеть.
Устройство
РИД устроен в принципе так же, как шаговый двигатель (рис. 5.1, 5.2). Он имеет статор, набранный из отдельных фигурных колец электротехнической стали. Внутри сердечник статора имеет зубцы, на которые надеты обмотки из изолированного медного провода. Соответствующие обмотки статора соединяются между собой, образуя фазы двигателя. РИД обычно имеют не меньше 3 фаз, однако они бывают и с меньшим числом фаз.
Ротор представляет собой зубчатый цилиндр, набранный из пластин электротехнической стали. Сердечники статора и ротора набираются из отдельных пластин с целью подавления вихревых токов.
Подключение обмоток РИД и устройство инвертора показано на рис. 5.3. Катушка L 1, и конденсатор С 1 образуют фильтр, который обменивается энергией с фазами двигателя и препятствует проникновению импульсов тока РИД в сеть. Этот фильтр также подавляет пульсации напряжения выпрямителя. Катушки L a, L b, L c - это фазы РИД.
 Рис. 5.3. Подключение обмоток РИД. Устройство инвертора. Цепи управления транзисторов не показаны. Рис. 5.3. Подключение обмоток РИД. Устройство инвертора. Цепи управления транзисторов не показаны. |
Принцип действия
Вначале рассмотрим инвертор. Попарное открытие транзисторов VT1 и VT2, VT3 и VT4, VT5 и VT6 подключает питание к фазам двигателя (восходящие части кривых на рис. 5.4, 5.5). Если закрывается один транзистор фазы двигателя, то эта фаза закорачивается и пропускает свой остаточный ток через соответствующий диод (спадающие части кривых в верхней части рис. 5.5). Например, если закрывается VT1, то ток катушки L a течет через VT2 и VD1. Если оба транзистора фазы закрываются, то катушки фазы отдают энергию конденсатору, питая его через оба диода своей фазы (спадающие до нуля части кривых на рис. 5.4, 5.5).
Принцип действия РИД похож на принцип действия шагового двигателя. Когда в обмотке какой-либо фазы течет ток, зубцы ротора притягиваются к зубцам этой фазы. После того как зубцы ротора окажутся напротив зубцов этой фазы, ток в ней отключается, и в это же время включается ток в обмотке другой фазы, зубцы которой в свою очередь начинают притягивать к себе зубцы ротора. Реально токи фаз включаются с перекрытием, так что в то время как одна фаза еще не полностью отработала, уже включается фаза, следующая ей на смену (рис. 5.4, 5.5). Благодаря этому пульсации момента двигателя получаются небольшими.
На рис. 5.2 изображен момент, когда фаза А полностью отработала, и на смену ей включается фаза В. Это примерно соответствует t = 0,069 с на рис. 5.3 и t = 0,074 с на рис. 5.4.
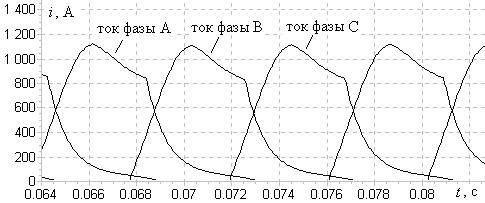 Рис. 5.4. Токи фаз РИД в однопульсном режиме (400 об/мин). Рис. 5.4. Токи фаз РИД в однопульсном режиме (400 об/мин). |
На больших скоростях ток фазы не успевает нарасти до недопустимо больших значений за одно включение, поэтому в течение рабочего цикла фаза двигателя включается и отключается один раз. Такой режим называется однопульсным (рис. 5.4). На малых скоростях рост тока фазы приходится ограничивать периодическим отключением, поэтому он изменяется в пределах так называемого токового коридора. Такой режим называется режимом ограничения тока (рис. 5.5).
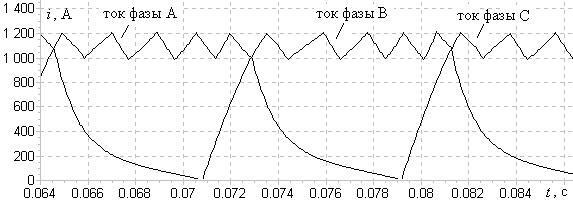 Рис. 5.5. Токи фаз РИД в режиме токового коридора (200 об/мин). Рис. 5.5. Токи фаз РИД в режиме токового коридора (200 об/мин). |
Замечание. Отличие РИД от шагового двигателя состоит в том, что шаговый двигатель, как правило, останавливается после каждого переключения токов в обмотках, поворачиваясь на угол, определенный конструкцией двигателя, а РИД вращается непрерывно и плавно. Шаговые двигатели обычно сделаны так, чтобы обеспечивать малые углы поворота, а также быстрый старт, а затем резкую остановку после поворота на заданный угол. Шаговые двигатели обычно бывают небольшими, в то время как РИД могут быть и очень маленькими, и очень большими.
Литература
1. Касаткин А.С., Немцов М.В. Электротехника: Учебное пособие для вузов. - 4-е издание, переработанное. - М.: Энергоатомиздат, 1983. - 440 с.
2. Борисов Ю.М. и др. Электротехника / Ю.М. Борисов, Д.Н. Липатов, Ю.Н. Зорин. Учебник для вузов. - 2-е издание, переработанное и дополненное. - М.: Энергоатомиздат, 1985. - 552 с.
3. Костенко М.П., Пиотровский Л.М. Электрические машины: учебник для вузов. - М.: Госэнергоиздат, 1956. - 459 с.

