 2014-01-31
2014-01-31 1429
14291.3.1 Особенности классификации звеньев САУ Основная задача теории автоматического управления ТАУ -разработать методы, с помощью которых можно было бы находить или оценивать показатели качества динамических процессов в САУ. Другими словами, рассматриваются не все физические свойства элементов системы, а только те, которые влияют, связаны с видом динамического процесса. Не рассматриваются конструктивное исполнение элемента, его габаритные размеры, способ подведения
энергии, особенности дизайна, номенклатура используемых материалов и т.д. Однако, важными будут такие, например, параметры, как масса, момент инерции, теплоемкость, сочетания RC, LC и т.д., напрямую определяющие вид динамического процесса. Особенности физического исполнения элемента важны только в той степени, в которой они будут влиять на его динамические показатели. Рассматривается, таким образом, только одно выделенное свойство элемента - характер его динамического процесса. Это позволяет свести рассмотрение физического элемента к его динамической модели в виде математической модели. Решение модели, т.е. дифференциального уравнения, описывающего поведение элемента, дает динамический процесс, подлежащий качественной оценке.
В основу классификации элементов САУ положены не особенности конструктивного выполнения или особенности их функционального назначения (объект управления, элемент сравнения, регулирующий орган и т.д.), а тип математической модели, т.е. математические уравнения связи между выходной и входной переменными элемента. Причем эта связь может быть задана, как в виде дифференциального уравнения, так и в другой трансформированной форме, например с помощью передаточных функций (ПФ). Дифференциальное уравнение даёт исчерпывающую информацию о свойствах звена. Решив его, при том или ином заданном законе входной величины, получаем реакцию, по виду которой оцениваем свойства элемента.
Введение понятия передаточной функции позволяет получить связь между выходной и входной величинами в операторной форме и при этом воспользоваться некоторыми свойствами передаточной функции, позволяющими существенно упростить математическое представление системы и воспользоваться некоторыми их свойствами. Для объяснения понятия ПФ рассмотрим некоторые свойства преобразования Лапласа.
1.3.2 Некоторые свойства преобразования Лапласа Решение моделей динамических звеньев САУ дает изменение переменных во временной плоскости. Мы имеем дело с функциями X(t). Однако, с помощью преобразования Лапласа их можно трансформировать в функции [Х(р)] с другим аргументом р и новыми свойствами.
Преобразование Лапласа есть частный случай соответствия типа: одной функции ставится в соответствие другая функция. Обе функции связаны между собой определённой зависимостью. Соответствие напоминает зеркало, отображающее различным образом, в зависимости от формы, находящийся перед ней объект. Вид отображения (соответствия) может быть выбран произвольным образом, в зависимости от решаемой задачи. Можно, например, искать соответствие между совокупностью чисел, смысл которого сводится к тому, как по выбранному числу у из области Y найти число х из области X. Такая связь может быть задана аналитически, в виде таблицы, графика, правила и т.д.
Аналогично может быть установлено соответствие между группами функций (рис. 3.1 а), например, в виде:

В качестве соответствия между функциями x(t) и х(р) (рис.3.1 б) может быть использован интеграл Лапласа:
при соблюдении условий: x(t) = 0 при  и
и  при t
при t .
.
В САУ исследуются не абсолютные изменения переменных, а их отклонения от установившихся значений. Следовательно, x(t) - класс функций, описывающих отклонения переменных в САУ и для них выполняется оба условия преобразования Лапласа: первое - так как до приложения возмущения изменения переменных не происходит, второе - так как с течением времени любое отклонение в работоспособной системе стремится к нулю.
Это условия существования интеграла Лапласа. Получим, в качестве примера изображения простейших функций но Лапласу.

Рис. 3.1. Виды отображения функций
Так, если дана единичная функция x(t) = 1, то
Для экспоненциальной функции x(t) = e-αt изображение по
Лапласу будет иметь вид:
Окончательно:

Полученные функции не сложнее исходных. Функция x(t) называется оригиналом, а х(р) - ее изображением. Условно прямое и обратное преобразование Лапласа можно представить в виде:
L[x(t)]=x(p),L-1<[x(p)]=x(t).
При этом существует однозначная связь между оригиналом и изображением, и наоборот, оригиналу соответствует только единственное изображение функции. Рассмотрим некоторые свойства преобразования Лапласа.
Изображение дифференциала функции. Пусть функции x(t) соответствует изображение х(р): x(t)—> х(р)- Необходимо найти изображение ее производной x(t):
Таким образом 
При нулевых начальных условиях 
Для изображения производной n-го порядка: 
Таким образом, изображение производной функции есть изображение самой функции, умноженное на оператор p в степени n, где п - порядок дифференцирования.
Элементарным динамическим звеном (ЭДЗ) называется математическая модель элемента в виде дифференциального уравнения, не подлежащего дальнейшему упрощению.
1.3.3 Инерционное апериодическое звено первого порядка
Такое звено описывается дифференциальным уравнением первого порядка, связывающего входную и выходную величины:

Примером такого звена кроме термопары, электродвигателя постоянного тока, RL-цепочки, может служить пассивная RC - цепочка (рис. 3.2 г).
Используя основные законы описания электрических цепей получим математическая модель апериодического звена в дифференциальной форме:

Получим связь между входной и выходной величинами звена в форме преобразования Лапласа:
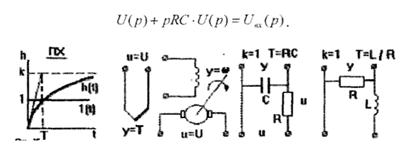
Рис. 3.2. Примеры апериодических звеньев
Отношение выходной величины к входной дает оператор вида:
 |
который называется передаточной функцией (ПФ). Таким образом ПФ апериодическогозвена будет:
Инерционный характер процесса, т.е. немгновенность воспроизведения входной величины, определяется в этих звеньях однонаправленностью преобразования входного потока энергии, т.е. растянутым во времени аккумулированием энергетического потока. Это вызвано таким основным физическим свойством данных элементов, как инерционность в виде массы, момента инерции, сочетания RC, LC. Инерционность - внутренняя физическая причина, связанная с экспоненциальным характером изменения выходной величины при скачкообразном изменении входной величины (рис, 3.2)
 |
Найдем полное решение X пол дифференциального уравнения первого порядка, складывающееся из общего хобщ и частного хчаст решений:
Общее решение хобщ определяет свободное движение системы при отсутсвии внешних воздействий только за счет внутреннего потенциала накопленной энергии.
Найдем хо6щ из  в виде: хобщ = Сер'.
в виде: хобщ = Сер'.
Получим после подстановки ТСрер' +Сер' =0 характеристическое уравнение Тр + 1 = 0. из которого получаем: р = -1/Т.
Частное - решение, соответствует определенному виду входной функции. Если это скачок  , то хчаст.=kx0 и xпол=Сept+Kx0
, то хчаст.=kx0 и xпол=Сept+Kx0
Найдем постоянную времени С для момента времени t = 0:
xпол= 0, с=-kx0
В окончательном виде полное решение запишется как:
а его изображение дано на рис 3.2 а.
Коэффициент Т - постоянная времени, представляет собой отрезок прямой kx, отсекаемый касательной к экспоненте и косвенно характеризующий время переходного процесса с точностью до 5% (tnn =3T); k - статический коэффициент усиления, показывает степень усиления сигнала в установившемся режиме, т.е. по окончании переходного процесса.
Переходным процессом называется реакция звена на скачкообразное воздействие (рис 3.3). В качестве входного воздействия могут быть приняты и другие типы возмущений (рис 3.4, 3.5).
Однако, нет необходимости исследовать реакцию элемента на всю гамму входных воздействий. В каждой из этих реакций проявятся, но по-разному одни и те же динамические свойства,
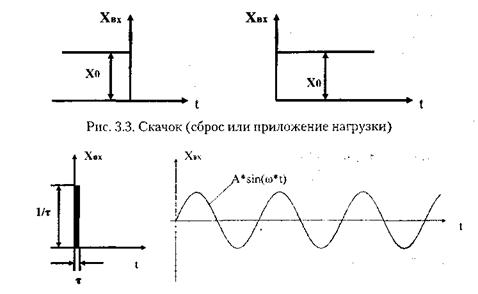
Рис. 3.4. Импульс Рис. 3.5. Периодическое
(мгновенное приложение синусоидальное воздействие
и сброс нагрузки)
т.е. в характере реакции будут проявляться одни и те же первооснов-ные свойства элемента, связанные с характером его движения.
Для данного элемента параметром интегрально оценивающим его свойства является инерционность, т.е. невозможность мгновенно воспроизведения входной величины.
1.3.4 Колебательное звено
Это звено описывается дифференциальным уравнением второго порядка:

характеристическим уравнением и ПФ в виде:

Корни характеристического уравнения комплексно-сопряжённые при  <1, а переходный процесс носит колебательный характер.
<1, а переходный процесс носит колебательный характер.
Корни действительные при >1, а переходный процесс носит апериодический характер.
Рассмотрим в качестве примера RLC-цепочку (рис.3.6). Используя уравнения Кирхгоффа получим:

Решение уравнения второго порядка носит характер затухающей синусоиды (рис.3.7).
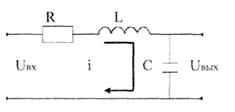 Колебательный характер процесса связан с возможностью обмена энергией между элементами звена. Для RLC - цепочки это обмен энергией между емкостью и индуктивностью.
Колебательный характер процесса связан с возможностью обмена энергией между элементами звена. Для RLC - цепочки это обмен энергией между емкостью и индуктивностью.
 Коэффициент демпфирования - определяет степень рассеивания энергии во внешнюю среду и степень колебательности
Коэффициент демпфирования - определяет степень рассеивания энергии во внешнюю среду и степень колебательности
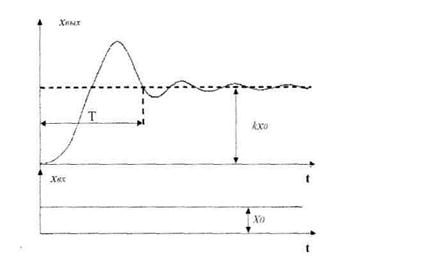 |
Рис. 3.7. Переходная характеристика колебательного звена
переходного процесса. Чем меньше тем колебатсльней переходный процесс.
Математически колебательный характер кривой (рис.3.6) определяется комплексными значениями корней характеристического уравнения:
Т2р2+2Тр + 1 = 0.
Коэффициент Т влияет на длительность затухания функции, а коэффициент k - на ее установившееся амплитудное значение. С точки зрения физической оценки этих параметров можно сказать, что величина Т связана с временем затухания процесса, - со степенью колебательности, k- со статическим коэффициентом усиления.
При = 0 рассеивания энергии нет, происходит только обмен энергией между элементами (незатухающий процесс).
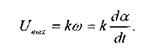
1.3.5 Идеальное интегрирующее звено
Это звено описывается уравнением вида:
 с ПФ
с ПФ 
Физическим аналогом звена может служить безынерционный двигатель (рис. 3.8), для которого

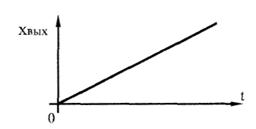
а переходная характеристика звена представляет собой прямую линию с наклоном tg = k (рис. 3.9).
= k (рис. 3.9).
1.3.6 Идеальное дифференцирующее звено
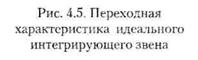
На выходе звена воспроизводится не входная величина, а скорость её изменения:

Математическая модель тахогенератора (рис. 3.10) представляет собой идеальное дифференцирующее звено:
Звено реагирует на изменение входа (скачок) в виде импульса (рис. 3.11).
1.3.7 Звено с постоянным запаздыванием Моделью звена служит выражение хеых (t) = ха (t - т) и ПФ W(p) = е~т. где выходная величина воспроизводится на х секунд позже входной. Такой моделью описывается весовой транспортер (рис. 3.12), для которого QBWS:(t) = QHr(t' х)> а переходная характеристика (рис. 3.13) повторяет входной скачок, сдвинутый относительно начала координат на время т.
1.3.8 Идеальное или пропорциональное звено Звено описывается уравнениями х (t) = кх с ПФ W(j>) =» k и воспроизводит входную величину в определенном масштабе за счет статического коэффициента усиления k. Примером таких звеньев могут служить электронный усилитель (рис. 3.14) и редукторная передача (рис. 3.15).
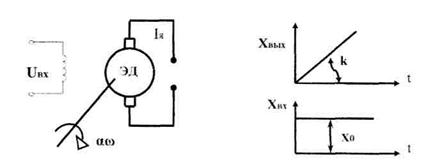
Рис. 3.8. Безынерционный Рис- 39- Переходная
электродвигатель характеристика электродвигателя
Рис. 3.10. Тахогенератор Рис. 3.11. Переходная характеристика дифференцирующего звена
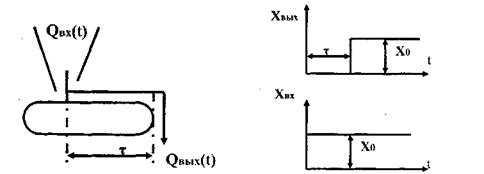
Рис. 3.12. Звено с постоянным Рис. 3.13. Переходная характеристика
запаздыванием звена с постоянным запаздыванием
Рис. 3.14. Электронный усилитель Рис. 3.15. Редукторная передача
В моделях элементарных динамических звеньев и в более сложных моделях элементов СЛУ правая часть уравнений характеризует способ приложения входного воздействий, а левая часть - указывает на то, как будет воспроизводиться входная величина. Например, в инерционном и колебательном звеньях входная величина как бы непосредственно приложена к элементу через статический коэффициент усиления k. Напротив, в дифференцирующем звене приложена как бы не сама входная величина, а ее производная, а в интегрирующем - ее интеграл. Могут быть и комбинированные способы приложения входных воздействий:
 |
1.4 ЧАСТОТНЫЙ МЕТОД ИССЛЕДОВАНИЯ САУ
1.4.1 Особенности частотного метода исследования Метод используется для анализа динамических свойств элементов САУ, но при подаче на вход периодического синусоидального сигнала. Суждения о свойствах элемента производится по изменению амплитуды выходного сигнала и сдвигу фазы при изменении .от
.от  до +
до + Линейные модели обладают следующим свойством: при подаче на вход элемента синусоидального сигнала A sin cot выходная функция Авх sin (
Линейные модели обладают следующим свойством: при подаче на вход элемента синусоидального сигнала A sin cot выходная функция Авх sin ( t +
t + ) меняется в установившемся режиме с той же частотой, но с другой амплитудой и сдвигом фазы.
) меняется в установившемся режиме с той же частотой, но с другой амплитудой и сдвигом фазы.
Рассмотрим апериодическое звено первого порядка. Подадим на вход звена синусоиду, на выходе получим синусоиду той же частоты, но другой амплитуды и сдвинутую по фазе  относительно входного сигнала:
относительно входного сигнала:
 |
Та же картина будет наблюдаться при косинусоидальном входном сигнале:
 |
Умножая первое уравнение на j и складывая его со вторым, с учетом
 |
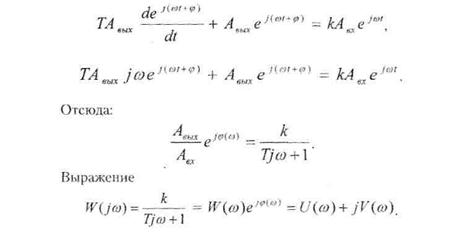 |
получим:
называется комплексной передаточной функцией, полученной заменой; p =j в ПФ звена.
в ПФ звена.
В левой части этого равенства находятся параметры, связанные с результатом физического проведения частотного эксперимента {Авых, ). В правой части этим параметрам поставлена в соответствие комплексная передаточная функция, что позволяет найти связь между физическими параметрами эксперимента, меняющимися с изменением со и типом и значениями коэффициентов исходной математической модели:
). В правой части этим параметрам поставлена в соответствие комплексная передаточная функция, что позволяет найти связь между физическими параметрами эксперимента, меняющимися с изменением со и типом и значениями коэффициентов исходной математической модели:

где  - модуль комплексной ПФ.
- модуль комплексной ПФ.
Тогда:

Полученные соотношения позволяют построить частотные характеристики: W() - амплитудно-частотную (АЧХ).  - фа-зочастотную (ФЧХ) и амплитудно-фазо-частотную W(j) (АФЧХ) (рис. 4.1).
- фа-зочастотную (ФЧХ) и амплитудно-фазо-частотную W(j) (АФЧХ) (рис. 4.1).
Частотные характеристики могут быть перестроены в логарифмическом масштабе с тем, чтобы добиться их более простого изображения на плоскости.
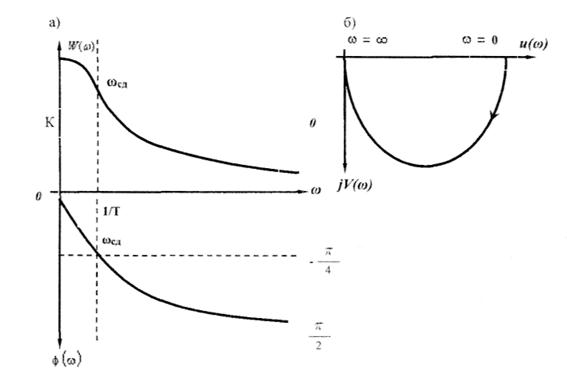
Рис. 4.1. Частотные характеристики апериодического звена а-АЧХ; б-АФЧХ
Для этого по оси абсцисс откладывается со в логарифмическом масштабе lg, а по оси ординат - величина, L()= 20 lg W(). Фазовая частотная характеристика меняет свой масштаб только по оси абсцисс. Перестроенные таким образом частотные характеристики (АЧХ) будут называться соответственно: L() - логарифмической амплитудно-частотной характеристикой (ЛАЧХ), - логарифмической фазо-частотной характеристикой (ЛФЧХ).
Определим вид ЛАЧХ. Так как
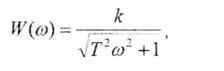
то L() = 20lg W() = 20lg k - 20lg .
.
В диапазоне малых частот, когда то
то  , а в
, а в
диапазоне больших частот, когда  то
то 
Исходная функция 20 lg  аппроксимируется отрезками двух прямых (рис. 4.2).
аппроксимируется отрезками двух прямых (рис. 4.2).
Определим наклон второго отрезка, для чего изменим со в 10 раз. Тогда .
.
Изменение амплитуды этой прямой произошло на величину -201g 10, т.е. на -20Д6 при изменении на декаду, т.е. в 10 раз.
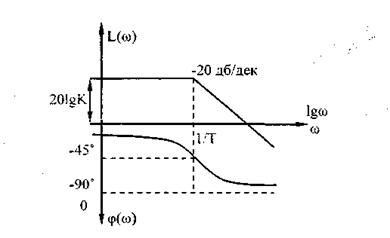
Рис. 4.2. ЛЧХ апериодического звена
ЛФЧХ имеет стандартный вид (рис. 4.2) и меняет только своё положение вдоль оси абсцисс в зависимости от значения Т.
1.4.2 Частотные характеристики колебательного звена Частотные характеристики колебательного звена строятся из следующих выражений.
Комплексный коэффициент усиления:
имеет модуль
и фазу

АФЧХ звена изображена на рис. 4.3 б.
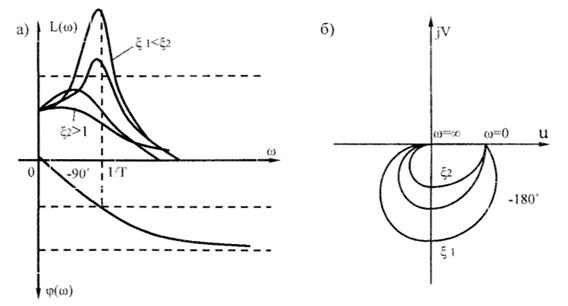
Рис. 4.3. Частотные характеристики АЧХ и ФЧХ колебательного звена: а - АЧХ и ФЧХ; б – АФЧХ
Для построения ЛАЧХ найдем:

Определим ЛАЧХ в областях низких и высоких частот.
Если  , то
, то 
Если , то
, то  .
.
Изменим со на декаду. Тогда . Наклон ЛАХЧ в области высоких частот составляет -40 дБ/дек.
. Наклон ЛАХЧ в области высоких частот составляет -40 дБ/дек.
Логарифмические частотные характеристики звена изображены на рис. 4.4.
1.4.3 Идеальное интегрирующее звено Математическая модель и соответствующая ПФ звена имеют вид:
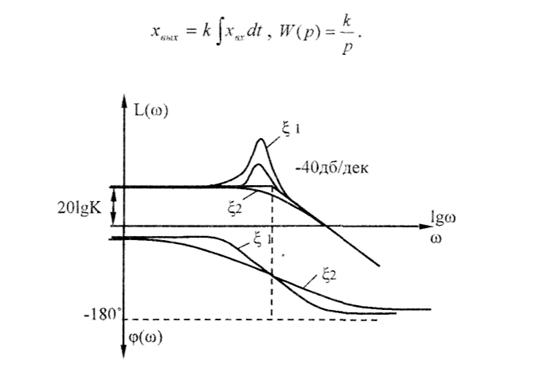
Рис. 4.4. ЛЧХ колебательного звена
 |
 Физическим аналогом звена может служить безынерционный двигатель, для которого
Физическим аналогом звена может служить безынерционный двигатель, для которого
Переходная характеристика звена представляет собой прямую с наклоном tg a = k (рис. 4.5).
 |
1.4.4 Идеальное дифференцирующее звено
На выходе звена воспроизводится не входная величина, а скорость её изменения

Математическая модель тахогенератора (рис. 4.6) представляет собой идеальное дифференцирующее звено
а переходная характеристика звена - импульс (рис. 4.7).
Найдем частотные характеристики идеального дифференцирующего звена используя соотношения:
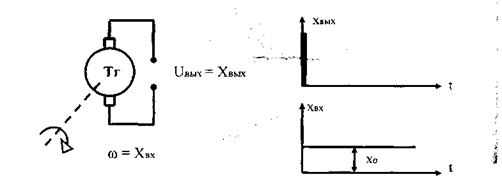
Рис. 4.6. Тахогенератор Рис. 4.7. Переходная характеристика
дифференцирующего звена
 |
Перестроим АЧХ звена в логарифмическом масштабе:
 |
Изменение на декаду дает:
 |
Это прямая с наклоном 20дБ/дек (рис. 4.9), принимающая значения:
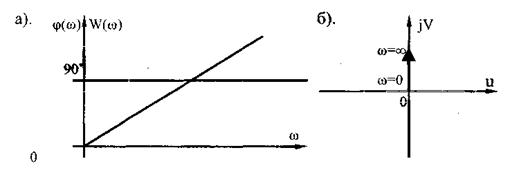
Рис. 4.8. Частотные характеристики дифференцирующего звена: а - АЧХ и ФЧХ; б -АФЧХ
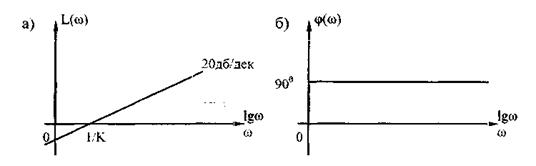
Рис. 4.9. ЛЧХ идеального дифференцирующего звена: а - ЛАЧХ; б - Л ФЧХ
1.4.5 Идеальное интегрирующее звено Для идеального интегрирующего звена замена в ПФ р на jco дает:

Соответствующие этим выражениям частотные характеристики изображены на рис. 4.10.
ЛАЧХ звена строится из выражения

представляя собой прямую с наклоном -20 дБ/дек (рис. 4.11).
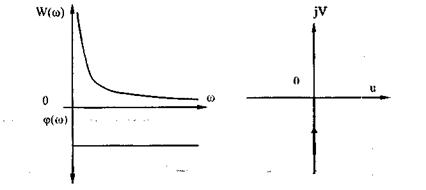
Рис. 4.10. Частотные характеристики интегрирующего звена:
а - АЧХ и ФЧХ; б - АФЧХ
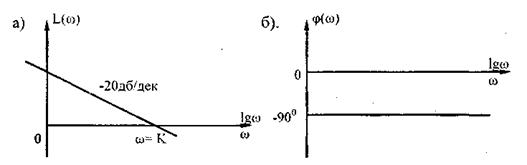
Рис. 4.11. ЛЧХ идеального интегрирующего звена: а - ЛАЧХ; б - ЛФЧХ
1.4.6 Звено с постоянным запаздыванием Для звена с постоянным запаздыванием частотные характеристики (рис. 4.13) получаются из выражений:

Логарифмические частотные характеристики звена изображены на рис. 4.14.
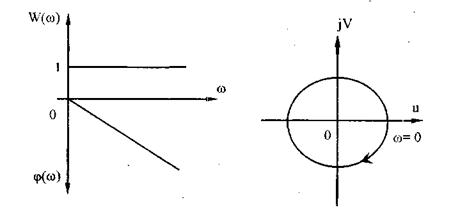
Рис. 4.13. Частотные характеристики звена с постоянным запаздыванием: а - АЧХ и ФЧХ; б - АФЧХ
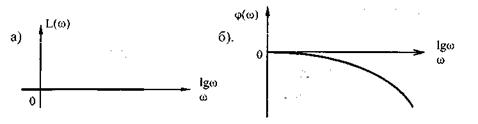
Рис. 4.14. ЛЧХ звена с постоянным запаздыванием: а-ЛАЧХ;б-ЛФЧХ

