 2014-01-31
2014-01-31 734
734Из общего курса электрических машин известно, что вращающий момент синхронного двигателя с возбужденными явно выраженными полюсами приближенно (без учета активного сопротивления обмотки статора) рассчитывается по формуле

где т — число фаз обмотки статора; Е0 — ЭДС, наводимая магнитным полем ротора в фазе обмотки статора в генераторном режиме (п = пс) при холостом ходе; U — напряжение питания, приходящееся на фазу обмотки статора; ωс — угловая синхронная скорость; xd = 2π fw 2λd — синхронное индуктивное сопротивление фазы обмотки статора по продольной оси машины (оси, совпадающей с осью полюсов); xq = 2π fw 2λq — синхронное индуктивное сопротивление фазы обмотки статора по поперечной оси машины (оси, направленной перпендикулярно оси полюсов); λ d, λ q — магнитные проводимости машины соответственно по продольной и поперечной осям; w - число витков фазы обмотки статора; θ — угол между вектором ЭДС, наводимой потоком по продольной оси и вектором напряжения.
|
|
|
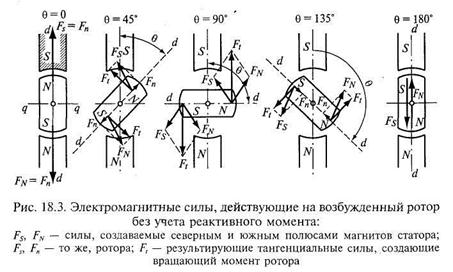
Вращающий момент М является суммой двух моментов: электромагнитного Ме, возникающего за счет взаимодействия вращающего поля статора с магнитным полем возбужденных полюсов ротора, и реактивного Mdq, обусловленного неравенством магнитных проводимостей машины по продольной d и поперечной q осям.
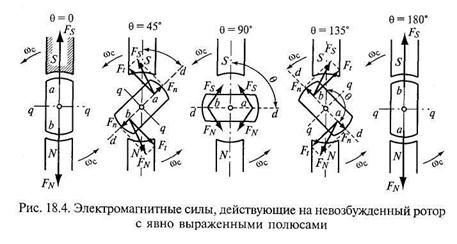
На рис. 18.3 и 18.4 схематично показана природа возникновения соответственно электромагнитного и реактивного вращающих моментов синхронного двигателя и их зависимость от угла 9. Вращающееся магнитное поле двигателя представлено в виде двух (наружных) полюсов магнита.








