 2014-01-25
2014-01-25 721
721Рис.44
Рис.43
Рассмотрим теперь твердое тело, на которое действует какая угодно система сил  ,
,  ,…,
,…, (рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил
(рис. 44, а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет действовать система сил
 = ,
= ,  = , …,
= , …,  = .
= .
приложенных в центре О, и система пар, моменты которых будут равны
 =
=  (),
(),  = (), …,
= (), …,  = (
= ( ),
),
Силы, приложенные в точке О, заменяются одной силой  , приложенной в той же точке. При этом
, приложенной в той же точке. При этом  или,
или,
 .
.
Чтобы сложить все полученные пары, надо геометрически сложить векторы моментов этих пар. В результате система пар заменится одной парой, момент которой  или,
или,
 .
.
Как и в случае плоской системы, величина, равная геометрической сумме всех сил, называется главным вектором системы; величина  , равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
, равная геометрической сумме моментов всех сил относительно центра О, называется главным моментом системы относительно этого центра.
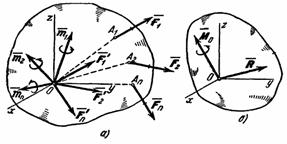
Таким образом мы доказали следующую теорему, любая система сил, действующих на абсолютно твердое тело, при приведении к произвольно взятому центру О заменяется одной силой, равной главному вектору системы и приложенной в центре приведения О, и одной парой с моментом , равным главному моменту системы относительно центра О (рис. 36, б).
|
|
|
Векторы и обычно определяют аналитически, т.е. по их проекциям на оси координат.
Выражения для R x, R y, R z нам известны. Проекции вектора на оси координат будем обозначать M x, M y, M z. По теореме о проекциях суммы векторов на ось будет  или,
или,  . Аналогично находятся величины M y и M z.
. Аналогично находятся величины M y и M z.
Окончательно для определения проекций главного вектора и главного момента получаем формулы:
Произвольную пространственную систему сил, как и плоскую, можно привести к какому-нибудь центру О и заменить одной результирующей силой и парой с моментом . Рассуждая так, что для равновесия этой системы сил необходимо и достаточно, чтобы одновременно было R = 0 и M о = 0. Но векторы и могут обратиться в нуль только тогда, когда равны нулю все их проекции на оси координат, т. е. когда R x = R y = R z = 0 и M x = M y = M z = 0 или, когда действующие силы удовлетворяют условиям


Таким образом, для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из трех координатных осей и суммы их моментов относительно этих осей были равны нулю.








