 2018-02-13
2018-02-13 561
561Это основной элемент локальной системы (САР). САР работает в локальной системе.
Задача: стабилизация технологического параметра, т.е. поддержание технологического параметра на заданном значении.
Как контроллер, так и АР на выходе могут формировать законы регулирования.
Законы регулирования – зависимости выхода от входа.
| АР |
| у |
| у0 |
| Хр |
 ,
, 
Хр направлено на устранение рассогласования между У и Уо
Существует три аналоговых закона регулирования:
1. Пропорциональный [-П-]
2. Пропорционально-интегральный [-ПИ-]
3. Пропорционально-интегрально-дифференциальный [-ПИД-]
Пропорциональный закон регулирования [-П-]

Хр-регулирующее воздействие
У-рассогласование
К-коэффициент усиления (0,05-50)
Недостаток: при его использовании в САР всегда будет статическая ошибка, т.е. небольшое отклонение текущего значения от заданного.
Используется там, где допустима статическая ошибка
Пропорционально-интегральный закон регулирования [-ПИ-]
 , Ти - время интегрирования
, Ти - время интегрирования
Преимущество: позволяет получать точное регулирование, т.е. отсутствует статическая ошибка.
Пропорционально-интегрально-дифференциальный закон регулирования [-ПИД-]
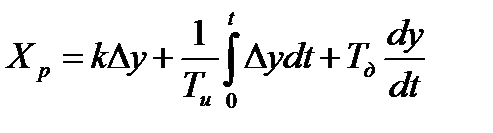
К, Ти, Тд - параметры настройки регулятора
Тд - время дифференцирования
Позволяет проводить точное регулирование, статическая ошибка отсутствует. Используют для очень инерционных объектов, в частности, для автоматизации печей. Данный закон, за счет третьей составляющей, позволяет проводить регулирование с опережающим воздействием








