 2020-01-14
2020-01-14 127
127Таким образом, задачей робота является исследование среды с целью составления ее карты и нахождение цели. Как отмечалось выше, сначала робот осуществляет построение карты внешней среды, двигаясь из начальной точки (рисунок 3.5) в соответствии с предложенной методикой.

Рисунок 3.5 – Нахождение оптимального пути
В результате этого формируется карта (рисунок 3.5), где белым цветом отмечены участки свободные для перемещения робота, черным – участки, занятые препятствием, а серым – целевой участок. Затем робот помещается в начальную точку движения. При этом его задачей является нахождение оптимального (в смысле длины траектории) пути движения к цели. Действуя в соответствии с описанным алгоритмом навигации по карте, робот достигает цели по траектории (рисунок 3.6), которая, очевидно, является наиболее оптимальной из всех траекторий, ведущих к цели.
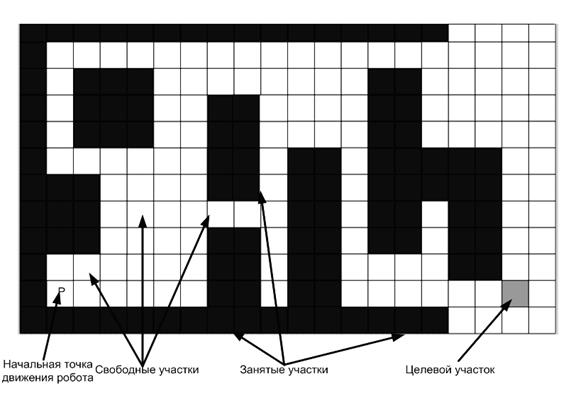
Рисунок 3.6 – Отображение карты среды
Исходя из этого, применение описанного метода позволяет роботу строить карту внешней среды и эффективно планировать траекторию движения к цели [11].








