 2020-04-12
2020-04-12 454
454На рис. 1.2 представлена характеристика асинхронного электродвигателя, выражающая зависимость частоты вращения двигателя от величин вращающего момента.
Рис. 1.2
Здесь Т ном − номинальный вращающий момент;
Т нач (или Т пуск) − момент, развиваемый при пуске двигателя;
Т max − максимальный момент (кратковременный);
n ном − номинальная частота вращения двигателя;
n кр − критическая частота вращения двигателя;
n с − синхронная частота вращения двигателя (при отсутствии нагрузки), то есть частота вращения магнитного поля, она зависит от частоты тока f и числа пар полюсов р: n с = 60 f / p.
Асинхронная угловая скорость, рад/сек:  .
.
При стандартной частоте f = 50 1/c и числе пар полюсов р от 1 до 4 синхронная частота вращения двигателя n с = 3000, 1500, 1000, 750 об/мин.
Частота вращения n ном, указываемая в каталогах электродвигателей, относится к номинальному режиму, её и принимают во внимание при определении общего передаточного отношения привода.
Под действием нагрузки частота вращения вала электродвигателя n эд уменьшается по сравнению с n с, возникает скольжение s, определяемое по формуле s = (n с – n эд) / n с. Следовательно, n эд = n с ∙ (1 – s).
|
|
|
К основным типам асинхронных электродвигателей трёхфазного тока, предназначенных для приводов общего применения, относят двигатели единой серии марок:
4АН – электродвигатели, защищенные от попадания капель и твёрдых частиц и от прикосновения к вращающимся и токоведущим частям;
4А − электродвигатели закрытые обдуваемые по ГОСТ 19523-74 (рис. 1.3). Формы исполнения: М100 − электродвигатели горизонтальные, станина на лапах (см. рис.1.3, а); М200 − то же и дополнительно с фланцем на щите (см. рис 1.2, б);
АО2 − электродвигатели закрытые обдуваемые по ГОСТ 13859-68 и их модификации.
Технические данные электродвигателей содержатся в каталогах, в табл. 1.4, 1.5 приведены краткие выдержки из них.
а 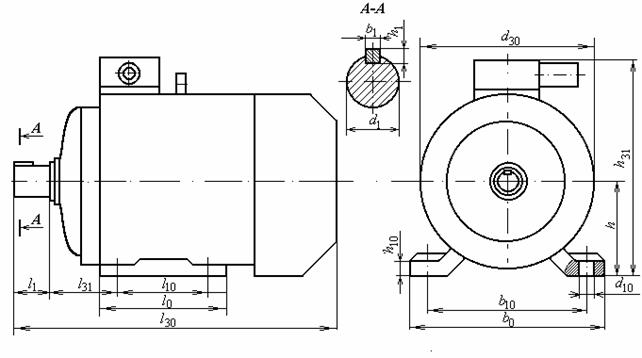
б 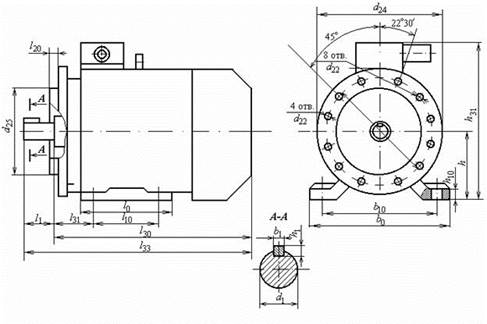 Рис. 1.3
Рис. 1.3
Таблица 1.4. Двигатели асинхронные короткозамкнутые трёхфазные серии 4А общепромышленного применения;
закрытые обдуваемые. Технические данные
| Номинальная | Синхронная частота, об/мин | |||
| 3000 | 1500 | 1000 | 750 | |
| 0,25 | – | – | – | 71В8/680 |
| 0,37 | – | – | 71А6/910 | 80А8/675 |
| 0,55 | – | 71А4/1390 | 71В6/900 | 80В8/700 |
| 0,75 | 71А2/2840 | 71В4/2810 | 80А6/915 | 90А8/700 |
| 1,1 | 71В2/2810 | 80А4/1420 | 80В6/920 | 90В8/700 |
| 1,5 | 80А2/2850 | 80В4/1415 | 90L6/935 | 100L8/700 |
| 2,2 | 80В2/2850 | 90L4/1425 | 100L6/950 | 112МА8/700 |
| 3,0 | 90L2/2840 | 100S4/1435 | 112МА6/955 | 112МВ8/700 |
| 4,0 | 100S2/2880 | 100L4/1430 | 112МВ6/950 | 132S8/720 |
| 5,5 | 100K2/2880 | 112М4/1445 | 132S6/965 | 132М8/720 |
| 7,5 | 112М2/2900 | 132S4/1455 | 132М6/970 | 160S8/730 |
| 11,0 | 132М2/2900 | 132М4/1460 | 160L6/975 | 160М8/730 |
| 15,0 | 160L2/2940 | 160L4/1465 | 160М6/975 | 180М8/730 |
| 18,5 | 160М2/2940 | 160М4/1465 | 180М6/975 | – |
| 22,0 | 180S2/2945 | 180S4/1470 | – | – |
| 30,0 | 180M2/2925 | 180M4/1470 | – | – |
Примечание: Структура обозначения типоразмера двигателя (расшифровывается слева направо):
|
|
|
4 − порядковый номер серии; А − вид двигателя − асинхронный; А − станина и щиты двигателя алюминиевые (отсутствие знака означает, что станина и щитычугунные или стальные); М − модернизированный; двух- или трёхзначное число − высота оси вращения ротора; А, В − длина сердечника статора; K, L, M, S − установочный размер по длине станины; 2, 4, 6, 8 − число полюсов; У3 − климатическое исполнение и категория размещения (для работы в зонах с умеренным климатом) по ГОСТ 15150-69.
Таблица 1.5. Двигатели. Основные размеры, мм
| Тип двигателя | Число полюсов | Исполнение | ||||||||||||||||||
| IM 1081 | IM 1081, | IM 1081, | IM 2081, | |||||||||||||||||
| d 30 | l 1 | l 30 | d 1 | b 1 | h 1 | l 30 | l 31 | d 10 | b 10 | h | h 10 | h 31 | l 20 | l 21 | d 20 | d 22 | d 24 | d 25 | ||
| 71А, В | 2, 4, | 170 | 40 | 285 | 19 | 6 | 6 | 90 | 45 | 7 | 112 | 71 | 9 | 201 | 3,5 | 10 | 165 | 12 | 200 | 130 |
| 80А | 186 |
| 300 | 22 | 100 | 50 | 10 | 125 | 80 | 10 | 218 |
|
| |||||||
| 80В | 320 | |||||||||||||||||||
| 90L | 208 | 350 | 24 | 8 | 7 | 125 | 56 | 140 | 90 | 11 | 243 | 4 | 12 | 215 | 15 | 250 | 180 | |||
| 100S | 235 | 60 | 362 | 28 | 112 | 63 | 12 | 160 | 100 | 12 | 263 | 14 | ||||||||
| 100L | 392 | 140 | ||||||||||||||||||
| 112М | 260 | 80 | 452 | 32 | 10 | 8 | 70 | 190 | 112 | 310 | 18 | 265 | 300 | 230 | ||||||
| 132S | 302 | 480 | 38 | 89 | 216 | 132 | 13 | 350 | 5 | 18 | 300 | 19 | 350 | 250 | ||||||
| 132М | 530 | 178 | ||||||||||||||||||
| 160S | 2 | 358 | 110 | 624 | 42 | 12 | 108 | 15 | 254 | 160 | 18 | 430 | 15 | |||||||
| 4, 6, 8 | 48 | 14 | 9 | |||||||||||||||||
| 160М | 2 | 667 | 42 | 12 | 8 | 210 | ||||||||||||||
| 4, 6, 8 | 48 | 14 | 9 | |||||||||||||||||
| 180S | 2 | 410 | 662 | 48 | 14 | 9 | 203 | 121 | 279 | 180 | 20 | 470 | 18 | 350 | 400 | 300 | ||||
| 4, 6, 8 | 55 | 16 | 10 | |||||||||||||||||
| 180М | 2 | 702 | 48 | 14 | 9 | 241 | ||||||||||||||
| 4, 6, 8 | 55 | 16 | 10 | |||||||||||||||||
Таблица 1.6. Мощности и скорости вращения двигателей А2, АО2, и АОЛ2
| Тип электродвигателя | Номинальная мощность, кВт | Частота вращения, мин-1 | Тип электродвигателя | Номинальная мощность, кВт | Частота вращения, мин-1 | Тип электродвигателя | Номинальная мощность, кВт | Частота вращения, мин-1 |
| АОЛ2-11-12 | 0,8 | 2830 | АО2-51-2 | 10 | 2920 | АО2-72-4 | 30 | 1460 |
| АОЛ1-12-2 | 1,3 | 2830 | АО2-52-2 | 13 | 2920 | АО2-71-6 | 17 | 970 |
| АОЛ2-11-4 | 1,6 | 1350 | АО2-51-4 | 7,5 | 1460 | АО2-72-6 | 22 | 970 |
| АОЛ2-12-4 | 0,8 | 1350 | АО2-52-4 | 10 | 1460 | АО2-71-8 | 13 | 730 |
| АОЛ2-11-6 | 0,4 | 910 | АО2-51-6 | 5,5 | 970 | АО2-72-8 | 17 | 730 |
| АОЛ2-12-6 | 0,6 | 910 | АО2-52-6 | 7,5 | 970 | АО2-81-2 | 40 | 2940 |
| АОЛ2-21-2 | 1,5 | 2860 | АО2-51-8 | 4,0 | 730 | АО2-82-2 | 55 | 2940 |
| АОЛ2-22-2 | 2,2 | 2860 | АО2-52-8 | 5,5 | 730 | АО2-81-4 | 40 | 1460 |
| АОЛ2-21-4 | 1,1 | 1400 | АО2-62-2 | 17 | 2890 | АО2-82-4 | 55 | 1460 |
| АОЛ2-22-4 | 1,5 | 1420 | АО2-61-4 | 13 | 1460 | АО2-84-6 | 30 | 980 |
| АОЛ2-21-6 | 0,8 | 930 | АО2-62-4 | 17 | 1450 | АО2-82-6 | 40 | 980 |
| АОЛ2-22-6 | 1,1 | 930 | АО2-61-6 | 10 | 970 | АО2-81-8 | 22 | 735 |
| АОЛ2-31-2 | 3,0 | 2880 | АО2-62-6 | 13 | 960 | АО2-82-8 | 30 | 735 |
| АОЛ2-32-2 | 4,0 | 2880 | АО2-61-8 | 7,5 | 725 | АО2-81-10 | 17 | 585 |
| АОЛ2-31-4 | 2,2 | 1430 | АО2-62-8 | 10 | 725 | АО2-82-10 | 22 | 585 |
| АОЛ2-32-4 | 3,0 | 1430 | А2-71-2 | 30 | 2900 | АО2-91-2 | 75 | 2960 |
| АОЛ2-31-6 | 1,5 | 950 | А2-72-2 | 40 | 2900 | АО2-92-2 | 100 | 2960 |
| АОЛ2-32-6 | 2,2 | 950 | А2-71-4 | 22 | 1460 | АО2-91-4 | 75 | 1470 |
| АО2-41-2 | 5,5 | 2910 | А2-72-4 | 30 | 1460 | АО2-92-4 | 100 | 1470 |
| АО2-42-2 | 7,5 | 2910 | А2-71-6 | 17 | 970 | АО2-91-6 | 55 | 980 |
| АО2-41-4 | 4,0 | 1440 | А2-72-6 | 22 | 970 | АО2-92-6 | 75 | 980 |
| АО2-42-4 | 5,5 | 1450 | А2-71-8 | 13 | 730 | АО2-91-8 | 50 | 740 |
| АО2-41-6 | 3,0 | 960 | А2-72-8 | 17 | 730 | АО2-92-8 | 55 | 740 |
| АО2-42-6 | 4,0 | 955 | АО2-71-2 | 22 | 2900 | АО2-91-10 | 30 | 585 |
| АО2-41-8 | 2,2 | 720 | АО2-72-2 | 30 | 2900 | АО2-92-10 | 40 | 585 |
| АО2-42-8 | 3,0 | 720 | АО2-71-4 | 22 | 1460 | |||
| Примечание. Число после первого тире обозначает типоразмер, в котором первая цифра – порядковый номер наружного диаметра сердечника статора, вторая цифра – порядковый номер длины двигателя; цифра после второго тире – число полюсов. | ||||||||
Пример.
Произвести кинематический расчет привода, показанного на рис.1.4, при следующих данных: диаметр барабана D = 500 мм, тяговое усилие на ленте Р = 4000 Н, скорость ленты v = 0,8 м/с.
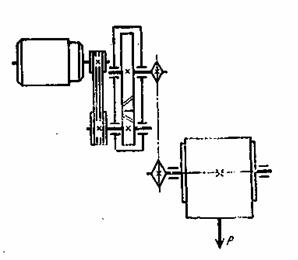
Рис. 1.4. Кинематическая схема привода ленточного транспортера
Решение.
Принимаем КПД передач, показанных на рис. 1.4:
ременной передачи  = 0,98;
= 0,98;
зубчатой пары  = 0,98;
= 0,98;
цепной передачи  = 0,96;
= 0,96;
потери в опорах трех валов  = 0,993.
= 0,993.
КПД всего привода

Требуемая мощность электродвигателя
|
|
|
 Вт.
Вт.
Частота вращения вала барабана
 об/мин.
об/мин.
Из таблицы 1.6 выбираем ближайшие по мощности электродвигатели с повышенным пусковым моментом:
АО2-42-6, имеющий N = 4 кВт и n = 955 об/мин, и
АО2-41-4, у которого N = 4 Квт и n = 1440 об/мин.
Определяем передаточные отношения привода:
в первом случае 
во втором  .
.
Приемлемы оба типа двигателя; в первом варианте передаточное отношение может быть реализовано, например, так: по таблице 1.3 выбираем для ременной передачи i1 = 2; для редуктора i2 = 4 и для цепной передачи i3 = 4. Общее  . Отклонение от заданного составит
. Отклонение от заданного составит  (допускается отклонение до
(допускается отклонение до  ).
).
После выбора электродвигателя и определения передаточного отношения редуктора выполняют расчеты зубчатых передач.








