 2014-02-02
2014-02-02 394
394Обеспечение требуемой точности
Ошибка воспроизведения полезного сигнала равна разности D (t) = g(t) — y(t). В цифровой форме аналогичная зависимость может быть записана для решетчатых функций D[n] = g[n] -у[п].
При использовании логарифмических характеристик для обеспечения ошибки не более заданного значения dmax можно построить запретную зону по выражению (11.14), если заданы максимальные значения скорости и ускорения задающего воздействия. Если же задан гармонический сигнал, то координаты контрольной точки определяются по выражению (11.15).
Если ЛАХ не будет заходить в запретную зону или же будет выше контрольной точки, то заданные требования по точности будут удовлетворяться.
Для того чтобы в реальной системе управления действительная точность воспроизведения задающего воздействия соответствовала принятой для построения запретной области, важным условием оказывается наличие в замкнутой системе достаточного запаса устойчивости. Выполнение обычных критериев запаса устойчивости оказывается достаточным для того, чтобы построенная запретная область для л.а.х. гарантировала получение желаемой точности.
В статических системах наклон первой асимптоты л.а.х. нулевой. Поэтому для обеспечения требуемой точности ЛАХ должна находиться выше контрольной точки.
Для синтеза корректирующих программ используем логарифмические амплитудные характеристики.
В этом случае вначале необходимо построить ЛАХ исходной системы. При допущениях, изложенных в п.п. 11.4.1 и 11.4.2, и учете того, что АИМ представляет собой формирователь нулевого порядка, рассмотрим построение высокочастотной части ЛАХ.
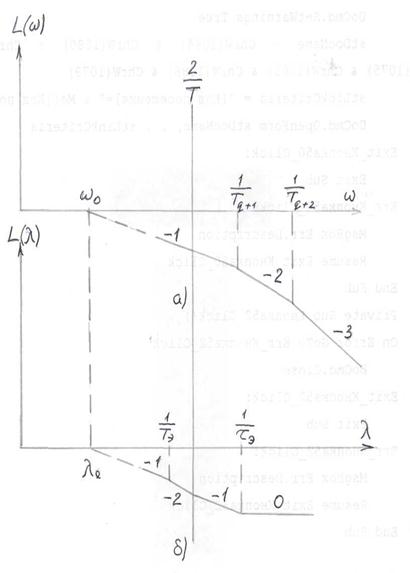
Рассмотрим построение высокочастотной части ЛАХ, когда вертикаль, проведенная через точку 2/Т, пересекается ЛАХ с наклоном – 20 дБ/дек.
В общем случае ЛАХ «хвоста» приведена на рис.14.9,а.
Для элементарного случая, когда
Wв(р) =  .
.
Применим к Wв(р) операцию Z – преобразования, тогда
Wв(z) =  , (14.8)
, (14.8)
Где d =  .
.
Перейдем в (14.8) к псевдочастоте, используя подставку (11.4).
Тогда из (14.8) получим частотную передаточную функцию
Wв(jl) = w0(1- jlT/2) ,
,  (14.9)
(14.9)
где Тэ =  , а tэ = Т э – Т q+1 .
, а tэ = Т э – Т q+1 .
Здесь Tэ > T/2, а tэ < Tэ .Вариант высочастотного «хвоста» ЛАХ приведен на рис.14.9,б.
Формулы для определения ЛАХ и ЛФХ по выражению (11.9) имеют вид:
Lв(l) = 20lgw0  (14.10)
(14.10)
j(w) = -900 + arctgltэ - arctglT/2 - arctglTэ (14.11)
|
Рис.14.9. Высокочастотная часть ЛАХ импульсной системы
Начало ЛАХ в высокочастотной области должно сливаться с концом ЛАХ в низкочастотной области.
Более сложный случай передаточной функции можно представить в приближенном виде:
Wв(p) =  . (14.12)
. (14.12)
Здесь обозначено: Tq+1 - наибольшая постоянная времени, большая Т/2, а t = Tq+2 +.. +Тn- эквивалентное запаздывание. Формула (14.12) обычно дает хорошее приближение, т.к. в выражении постоянные времени являются малыми в том смысле, что они соответствуют высокочастотному "хвосту" ЛАХ.
Для нахождения Z-передаточной функции по Wв(p) необходимо применить Z – преобразование к смещенным решетчатым функциям, что выходит за рамки нашего рассмотрения. (Эти вопросы изложены в [12])
Мы же для решения вопроса разложим e-tp в ряд e-tp = 1 - tp/1! + t2p2/2! - t3 p3/3! +….и возьмем первые два члена разложения. Тогда
Wв(p) =  и
и
Wв(z) @  .
.
Здесь d = e-aT , а = 1/Тq+1.
Переходя аналогично предыдущему к псевдочастоте, получим
W в (jl) = w0 (1 - jlT/2) , (14.13)
, (14.13)
где Тэ соответствует ранее полученному выражению, а tэ = Тэ – Тq+1 – t.
ЛАХ и ЛФХ определяются ранее полученными соотношениями (14.10) и (14.11). В зависимости от величин Т, Тq+1 и t ЛАХ может иметь вид, изображенный на рис 14.9,б.
Перейдем теперь к случаю, когда пересечение вертикальной линии на частоте = Т/2 асимптотической ЛАХ непрерывной части происходит с наклоном -40 дБ/дек (рис.14.10).
Тогда передаточная функция в высокочастотной области должна быть записана в виде
Wв(р) =  .
.
Базовая частота в этом случае равна
wо =  .
.
Причем должно выполняться условие m £ q. В частном случае базовая частота wо может совпадать с w c. В простейшем случае (рис.14.10,а) Wв(р) =  . (14.14)
. (14.14)
Тогда аналогично предыдущему можно найти
Wв(jl) = w02(1 -jlT/2)/(jl)2 (14.15)
ЛАХ, соответствующая (14.15), также построена на рис.14.10,а. В более общем случае заменим передаточную функцию (14.14) приближенным выражением:
Wв(p) =  ,
,
где t = Тq+1 + …..+Тn
Разложив е-tp в ряд и взяв первые два члена разложения, получим
Wв(jl) =  .
.
ЛАХ и ЛФХ определяются выражениями
Lв(l) = 20lgwо2 .
.
j(l) = -1800 -arctglT/2- arctglt
ЛАХ для этого случая построена на рис.14.10,б.
Рис.14.10. ЛАХ импульсной системы в области высоких частот (2 случай)
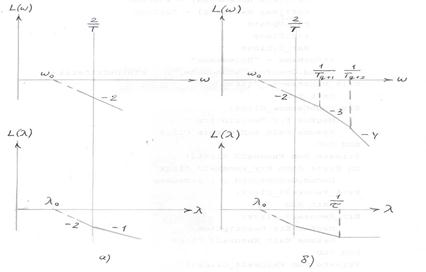
Сопряжение ЛАХ, построенных для низкочастотной области и для высокочастотной области, происходит на частоте l = 2/T, на которой наблюдается излом асимптотической ЛАХ (рис.14.10).
Следующим шагом синтеза является построение ЖЛАХ ЦАС. Для этого необходимо воспользоваться рекомендациями раздела 11.5 и использовать приложение 4 вместо указанного там приложения 3.
После построения ЖЛАХ в низкочастотной области (l < 2/T) ее необходимо дополнить высокочастотным «хвостом», полученным в этом разделе.
ЛАХ Lку(l) корректирующего устройства последовательного типа определяется вычитанием Lисх(l) из Lж(l). По виду Lку(l) определяется его передаточная функция Wку(l), а затем путем подстановки jl =  определяется Wку(z).
определяется Wку(z).
После получения Wку(z) проверяется устойчивость корректирующего устройства.
Для программной реализации коррекции используется следующий подход.
Пусть полученная передаточная функция
Wку(z) =  .
.
Здесь Uвх и Uвых входные и выходные напряжения КУ.
Положим, что r = m и разделим числитель и знаменатель на zm.
В этом случае Wку =  .
.
Тогда можно записать Uвых(z)(ao + a1z-1 + ….+ am-1z -m+1 + amz -m) = Uвх(z)(bo + b1z-1 +…..+ bm-1z -m+1 + bmz -m).
Перейдя к решетчатым функциям можно записать
Uвых[n] = b01Uвх[n] + b11Uвх[n -1] +…..+ bm1Uвх[n -m] – а11Uвых[n-1] – a21U вых[n- 2] - ….- am1 U вых[n- m]. (14.16)
Здесь аi1 = ai/a0, где i = 1,2,…m; bi1 = bi/a0, где i = 0,1,….m.
Выражение (14.16) определяет алгоритм программной реализации корректирующего устройства.
В соответствии с рис.14.6 Wку(z) = D(z) = xo(z)/Do(z) (14.17)








