 2014-02-02
2014-02-02 1408
1408Разумеется, что полученные на основе векторной диаграммы схемы замещения генераторов совпадают с теми схемами, которые известны из дисциплин «Электрические машины» и «Электромагнитные переходные процессы». Напомним схемы замещения основных элементов электрической системы (табл. 6.3).

Линии электропередачи.При исследовании переходных процессов линии электропередачи могут замещаться Т- или П-образными схемами замещения:
Zл= rл + jxл; rл=r0l; xл=x0l; yл=b0l
где l — длина линии, км; r0 и х0 — удельные активное и индуктивное сопротивления линии, Ом/км; b0 — удельная емкостная проводимость линии, См/км [1/(Ом- км)].
При длинах линии более 300 км в указанные соотношения должны вводиться поправочные коэффициенты, принимаемые комплексными при длинах линии более 1000 км.
При упрощенном рассмотрении электромеханических переходных процессов воздушные линии могут заменяться полными Zл или чисто реактивными хл сопротивлениями. Основанием к этому могут быть или небольшая длина линии, или наличие компенсирующих устройств (шунтирующих реакторов), уничтожающих в схеме замещения составляющую емкостной проводимости.
Активное сопротивление в упрощенных расчетах часто может не учитываться, так как в мощных электропередачах, имеющих провода большого сечения, оново много раз меньше реактивного. При изучении переходных процессов в системах, имеющих малую мощность или содержащих кабельные линии, активное сопротивление следует учитывать.
Асинхронные двигатели.Асинхронные • двигатели при исследовании переходных процессов представляются (см. табл. 6.3) известной схемой 2, а, отображающей основные контуры машины с учетом потерь.
Для расчетов, выявляющих количественные соотношения, рекомендуется пользоваться более точными схемами замещения.
В практических расчетах часто применяют упрощенные в той или иной степени схемы замещения двигателя. Степень упрощения зависит от поставленных в каждом конкретном случае задач и точности расчета. Во многих случаях приемлемую точность обеспечивает Г-образная схема замещения 2, б. Для анализа общих соотношений и оценки влияния процессов, происходящих в двигателе, на систему можно воспользоваться грубо приближенной схемой 2, в, дающей завышение вращающего момента двигателя на 10—15%, или даже схемой 2, г.
Трансформаторы.При составлении схемы замещения для исследования переходных электромеханических процессов в системах трансформаторы можно представить Г-образными схемами 3, в, объединяя сопротивления Х\ и Хц обмоток, а также относя сопротивление ветви намагничивания к стороне высшего или низшего напряжения в зависимости от удобства преобразования схемы системы в дальнейших расчетах. В ряде случаев ветвь намагничивания опускается (схема 3, г).
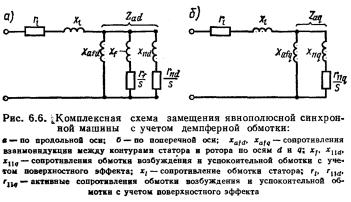
Синхронные машины (генераторы). Комплексная схема замещения машины показана на рис. 6.6. Соответствующие частные схемы для определения реактивных сопротивлений, представляющих генератор в некоторых характерных режимах, приведены в графах 4.1—4.4 табл. 6.3. Эти схемы предполагают, что синхронно работающий генератор находится или в начальной стадии переходного процесса (x d’, xd’, xq’), или в установившемся режиме (xd, xq). При асинхронном режиме (работа при скольжении s Ф 0) приближенные Г-образные частные схемы для определения сопротивлений Zd’ Zd’’ Zq’’ получаются на основе схем, изображенных на рис. 6.6. Они принимают вид схем, показанных в графе 4.3 табл. 6.3. Эти схемы аналогичны упрощенной Г-образной схеме замещения 2, в асинхронного двигателя.
Дальнейшее упрощение заключается в отбрасывании ветви намагничивания аналогично тому, как это было сделано для асинхронного двигателя. После этого схемы приобретают вид схем 4.4, а, б, в табл. 6.3. Входящие в них сопротивления xi, xa, х3 легко представить через основные каталожные параметры
синхронного генератора. Так, рассматривая cхему 4.3, а в предположении, что rf = 0, а также учитывая, что xl + xa/d = хd и xl + xf = xt, получим
xd’ = хd хl /(хd + х1),
откуда
x1 = xd xd’ /(xd — x'd).
Аналогично из схем рис. 4.3, б, в будем иметь соответственно
x2=xd’xd’’/(xd’-xd”) x3=xq xq’’/(xq – xq”)
Заметим, что схемы замещения 4.4, а, б в основном только качественно отражают происходящие явления. В самом деле, схема 4.4, а предполагает, что на роторе машины действует только одна короткозамкнутая обмотка возбуждения. Схема 4.4, б соответствует такому же предположению относительно продольной демпферной обмотки, а схема 4.4, в — относительно поперечной. Однако, несмотря на грубость этих предположений, получаемые на их основе приближенные Г-образные схемы замещения часто могут быть полезны не только для оценки характера процесса, но и для выявления важных количественных соотношений.

