 2014-02-02
2014-02-02 772
772Для того, чтобы человек сознательно воспринял информацию (для примера возьмем чертеж), она должна пройти довольно длительный цикл предварительной обработки. Вначале свет попадает в глаз. Пройдя через всю оптическую систему фотоны в конце концов попадают на сетчатку — слой светочувствительных клеток — палочек и колбочек.
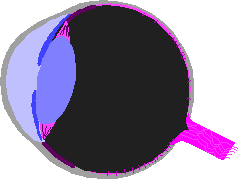
Уже здесь — еще очень далеко от головного мозга, происходит первый этап обработки информации, поскольку, например, у млекопитающих, сразу за светочувствительными клетками находится обычно два слоя нервных клеток, которые выполняют сравнительно несложную обработку.
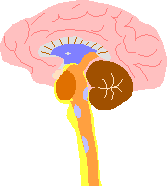
Теперь информация поступает по зрительному нерву в головной мозг человека, в так называемые "зрительные бугры". То, что именно сюда приходит видеоинформация для дальнейшей обработки, показывают многочисленные опыты над людьми во время различных операций, в ходе которых производилась трепанация черепа. При этом пациентам раздражали область зрительных бугров слабым электрическим полем, что вызывало у них различные световые галлюцинации. Причем, что интересно, при изменении места раздражения, пропорционально смещению, смещались и места галлюцинаций, т. е. на зрительные бугры как бы проецируется то, что мы видим.
|
|
|
Некоторые исследователи пошли дальше, и вживляли слепым людям целую матрицу электродов, напряжения на которых соответствовали освещенности соответствующих участков видеокамеры, размещенной на голове пациента. После операции, слепые начинали различать крупные фигуры (квадрат, треугольник, круг) и даже читать текст (при вживлении матрицы 10*10). Широкому распространению данного метода лечения слепоты препятствуют как недостаточно высокий наш технический уровень, так и чрезвычайно высокая опасность операций на открытом мозге. Такого рода опыты проводятся только попутно с операцией, вызванной другими причинами.
Далее зрительная информация поступает в отделы мозга, которые уже выделяют из нее отдельные составляющие — горизонтальные, вертикальные, диагональные линии, контуры, области светлого, темного, цветного. До этих пор мы можем без труда смоделировать работу мозга применяя различные графические фильтры. Постепенно образы становятся все более сложными и размытыми, но графический образ картины пройдет еще долгий путь, прежде чем достигнет уровня сознания. Причем на уровне сознания у нас будет не только зрительный образ, к нему примешаются еще и звуки, запахи (если картина представляет собой натюрморт) и вкусовые ощущения. Дальнейшие ассоциации каждый может додумать сам.
Смысл всего сказанного заключается в том, чтобы показать, что в системах ИИ имеются подсистемы, которые мы уже сейчас можем реализовать даже не зная о том, как они реализованы у человека. Причем можем это сделать не хуже, чем у прототипа, а зачастую и лучше. Например, искусственный глаз (а равно и блок первичной обработки видеоинформации, основанные на простейших фильтрах или др. сравнительно несложных устройствах) не устает, может видеть в любом диапазоне волн, легко заменяется на новый, видит при свете звезд.
|
|
|
Устройства обработки звука позволяют улавливать девиацию голоса человека в 1-2 Герца. Данное изменение частоты происходит при повышенном возбуждении вегетативной нервной системы, которое в свою очередь часто обусловлено волнением человека. На данном принципе основаны современные детекторы лжи, которые позволяют обнаружить с высокой вероятностью даже записанные на пленку много лет назад ложные высказывания.
Современные системы управления электродвигателем позволяют с высокой точностью держать заданные координаты даже при ударном изменении нагрузки. А ведь это примерно тоже, что держать на длинной палке баскетбольный мяч, по которому то слева, то справа кидают теннисные мячи.
За одно и тоже время, компьютер произведет гораздо больше арифметических операций и с большей точностью, чем человек.
Антиблокировочная система на автомобилях позволяет держать тормоза на грани заклинивания колеса, что дает наибольшее трение с дорогой, а это без АБС по силам только очень опытным водителям.
В принципе такие примеры, где техника оказывается ничуть не хуже человека, можно продолжать до бесконечности. Общий же смысл сказанного в том, что при конструировании ИИ, мы не связаны одним набором элементарных составляющих, как природа. В каждом конкретном случае желательно применять то, что даст самый большой эффект. В той области, где у человека господствуют рефлексы (чихание, быстрое напряжение быстро растягиваемой мышцы, переваривание пищи, регулировка температуры), мы вообще можем применить жесткие системы управления, с раз и навсегда заданным алгоритмом функционирования. При этом вполне можно ожидать увеличения точности и уменьшение времени обучения их до нуля. При этом ядро нашей системы ИИ будет решать уже не настолько глобальные задачи.
Данный принцип разбиения задачи на подзадачи уже давно используется природой. К примеру, мы далеко не полностью используем все возможности наших мышц в области разнообразия движений. Мы не можем заставить наши глаза смотреть в разные стороны, не говоря уже о том, чтобы делать это на разном уровне (левый глаз — влево-вверх, правый — вправо-вниз). При ходьбе мы часто используем далеко не оптимальный набор движений и далеко не все сочетания вариантов напряжения мышц мы опробуем. Попробуйте к примеру сделать волну животом. В принципе здесь нет ничего сложного, поскольку каждый пучок мышц пресса иннервируется отдельно, но если Вы этого не делали ранее, то получить необходимый результат будет не просто — в повседневной жизни это действие ненужно, а значит его нет и в "словаре движений", а на обучение необходимо определенное время. А по поводу оптимальности походки существуют расчеты, что если бы человек всегда рассчитывал оптимально траекторию движения в которой существует более 200 степеней свобод, то он бы не ходил, а в основном бы только думал о том, как надо ходить.
На самом деле наша система управления построена по иерархическому принципу, когда задача распределяется между несколькими уровнями. Высший уровень нервной системы (связанный с большими полушариями мозга) ставит лишь общую задачу, скажем, переложить книгу на стол. Этот уровень вообще не контролирует действие отдельных двигательных единиц, направленных на решение поставленной задачи. Здесь уместна аналогия: командующий армией, ставя перед своими войсками некую общую задачу, отнюдь не предписывает каждому солдату и офицеру, что именно он должен делать в каждый момент операции.
|
|
|
Детализация построения движений у человека происходит на уровнях более низких, чем командный уровень коры больших полушарий. Более того, в некоторых случаях (когда мы отдергиваем руку, прикоснувшись к горячему предмету, даже не успев осознать ситуацию) все управление формируется на нижележащих уровнях, связанных с различными отделами спинного мозга.
В общем ситуация схожа с той, когда программист использует библиотеку подпрограмм. При этом ему не важно, какой алгоритм они используют, если программа работает нормально. А на написание своей библиотеки тратится драгоценное время. Кроме того, еще не известно, будет ли она работать так же хорошо.
Общий вывод данной лекции состоит в том, что в настоящее время существуют методы, алгоритмы и устройства, которые позволяют нам довольно неплохо смоделировать нижние уровни человеческого интеллекта, причем совсем не обязательно на таком же физическом принципе. И если бы это была не лекция, а тост, то я бы закончил его: " …так выпьем же за протестированные, правильно работающие и бесплатные библиотеки подпрограмм".








