 2014-02-02
2014-02-02 2610
2610Классификация автоматических регуляторов
Законы регулирования и автоматические регуляторы
Многочисленные типы автоматических регуляторов для одноконтурных систем автоматического регулирования классифицируют по ряду признаков.
По виду регулируемой величины регуляторы делятся нарегуляторы температуры, давления, расхода, уровня и т.п. Некоторые регуляторы специально предназначены для регулирования определённых величин (температуры, давления). Большинство выпускаемых современными производителями средств автоматизации регуляторов предназначены для регулирования любых технологических величин.
По виду регулирующего воздействия регуляторы делятся на регуляторы непрерывного действия и дискретного (прерывистого) действия. Регуляторы непрерывного действия в процессе регулирования непрерывно изменяют воздействие на объект. Регуляторы дискретного действия изменяют воздействие либо в определённые моменты времени, либо при достижении регулируемой величиной определённого значения. Простейшим типом регуляторов дискретного действия являются двухпозиционные регуляторы, регулирующий орган которых может занимать только два положения («закрыто» или «открыто»).
В зависимости от источника энергии, используемой для перемещения регулирующего органа, различают регуляторы прямого и непрямого действия. В регуляторах прямого действия для перемещения регулирующего органа используется энергия самого объекта. В регуляторах непрямого действия энергия для перемещения регулирующего органа подводится от внешнего источника.
По виду используемой энергии регуляторы непрямого действия делятся на электрические, пневматические и гидравлические.
Самым существенным признаком для классификации регуляторов является такая их характеристика, как функциональная зависимость между перемещением регулирующего органа и отклонением регулируемой величины. Как и любой другой элемент системы автоматического регулирования (САР), регулятор может иметь линейную или нелинейную характеристику. По виду указанной характеристики линейные регуляторы делятся на И-регуляторы (интегральные, астатические); П-регуляторы (пропорциональные, статические); ПИ–регуляторы (пропорционально-интегральные, изодромные); а также регуляторы с предварением (дифференцированием): ПД– регуляторы и ПИД– регуляторы. В промышленной практике получили распространение, в основном, П, ПИ и ПИД– регуляторы.
В системах автоматического регулирования дискретного (прерывистого) действия применяются регуляторы дискретного релейного типа. Позиционные регуляторы широко используются при автоматизации технологических процессов. Наиболее простым из них является двухпозиционный регулятор (ДПР), у которого рабочий орган может занимать только два положения — полностью открыт или полностью закрыт, что соответствует максимальному и минимальному регулирующему воздействию. Характеристика ДПР приведена графически на рис. 1а, где видно, что отклонение регулируемой величины ∆х от заданного значения xо на величину большую ε (диапазон наибольших отклонений регулируемой величины от заданного значения, не вызывающих срабатывания регулятора), вызывает срабатывание регулятора и управляющее его воздействие равно Qmах или Qmin в зависимости от знака отклонения.
Переходный процесс в статической САР с двухпозиционным регулятором (рис.1.8 б) носит характер незатухающих колебаний; на рис.1.8 в приведен график соответствующего положения регулирующего органа.
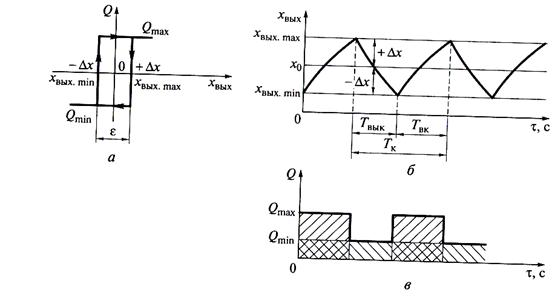
Рис. 1.8. Система автоматического регулирования с двухпозиционным регулятором:
a — график регулирующего воздействия; б — переходной процесс регулирования; в — положение регулирующего органа
Основными показателями качества колебательного процесса в системе с ДПР являются период колебаний Тк и амплитуда колебаний Тк. Период колебаний равен суммарной продолжительности двух состояний регулирующего органа — во включенном ТВК и выключенном Т вык положениях.
В объектах без запаздывания амплитуда колебаний практически равна половине зоны нечувствительности регулятора. При наличии запаздывания амплитуда колебаний будет тем больше, чем больше зона нечувствительности регулятора и чем больше отношение τ3/ Тоб для регулируемого объекта. Поэтому ДПР целесообразно применять на объектах с малым запаздыванием τ 3 и большой постоянной времени Тоб ( τ3/ Тоб < 0,2 ).

