 2014-02-03
2014-02-03 437
437Таблица 2.6
Раздел 2. Лекция 4. Идентификация объектов автоматического управления
Как параметры датчиков мощности влияют на динамические показатели управления электрической печью сопротивления.
Охарактеризуйте передаточную функцию датчика мощности электрической печи сопротивления.
Охарактеризуйте передаточную функцию датчика температуры электрической печи сопротивления.
Охарактеризуйте передаточную функцию футеровки электрической печи сопротивления.
Охарактеризуйте передаточную функцию нагреваемого изделия электрической печи сопротивления.
Охарактеризуйте передаточную функцию нагревателя электрической печи сопротивления.
9.Как динамические параметры термопар влияют на показатели измерений?
Литература по лекции 3.
1.Ульянов В,А., Леушин И.О., Гущин В,Н. Технологические измерения, автоматика и управление в технических системах. Ч.2. Н.Новгород: НГТУ, 2000. –С.306-316, 319-381.
2.Автоматизация металлургических печей/ Каганов В.Ю., Блинов О.М., Глинков Г.М., Морозов А.М. М.: Металлургия, 1975. С.119-151, 328-368.
5.Коганов В.Ю., Блинов О.М., Беленький А.М. Автоматизация управления металлургическими процессами. М.: Металлургия,!974. С.304-375.
Исследование системы автоматического регулирования основано на последовательном решении трёх задач: идентификации объекта управления, синтез системы и анализ работы системы.
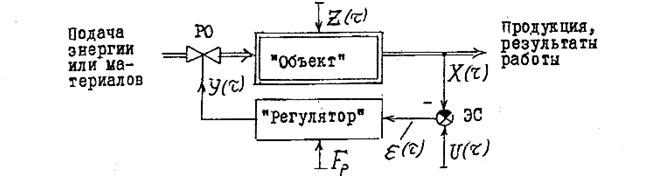
Под идентификацией объекта понимается методика подбора модели, которая адекватно отражает динамические свойства конкретного объекта управления. Обычно используется структурно – параметрическая идентификация, основанная на подборе типовой модели по экспериментальным данным, которые характеризуют реакцию объекта на ступенчатое или гармоническое воздействие. Выбирается структура модели, а затем определяются численные значения её параметров, как это показано на рис.2.23. Решение задачи завершается проверкой адекватности модели.
Под синтезом и анализом системы понимается комплекс логико – математических операций, которые позволяют определить нужный закон регулирования, найти оптимальные параметры настройки регулятора и по рассчитанной кривой переходного процесса в системе оценить качество регулирования.
Информационные технологии решения сложных задач основаны на применении определённых алгоритмов логико – математического анализа исходных данных, необходимых вычислительных программ и персональных компьютеров.
Задача идентификации объекта решается с использованием экспериментальных данных о реакции объекта управления на единичное ступенчатое воздействие или на длительное влияние гармонических воздействий. Это определяет варианты решения задачи.
Одна из существующих технологий решений рассматриваемой задачи базируется на описании динамических свойств статического объекта с помощью передаточной функции:
 .
.
 Численное значение параметров этой функции определяются с помощью компьютерной программы «Идентификация статического объекта», которая основана на использовании экспериментальных данных и метода итераций.
Численное значение параметров этой функции определяются с помощью компьютерной программы «Идентификация статического объекта», которая основана на использовании экспериментальных данных и метода итераций.
Рис.2.23.Блок схема САР:  - регулируемый (выходной параметр;
- регулируемый (выходной параметр;  - управляющее задающее воздействие;
- управляющее задающее воздействие;  - сигнал рассогласования системы;
- сигнал рассогласования системы;  - регулирующее воздействие;
- регулирующее воздействие;  - неконтролируемые возмущения;
- неконтролируемые возмущения;  - закон регулирования
- закон регулирования
Адекватность решения задачи оценивается путём сопоставления рассчитываемой кривой переходного процесса с исходными экспериментальными данными.
Если анализируются данные о реакции объекта на гармоническое воздействие, то адекватность решения задачи оценивается путём сопоставления найденных и исходных частотных характеристик  и
и  .
.
Для совместного решения задач синтеза и анализа разработана другая информационная технология, основанная на применении новых характеристик «Параметрические области устойчивости конкретных систем» и пакета вычислительных программ.
Параметрические области устойчивости конкретных систем рассчитываются путём решения системы уравнений:
 ,
,
которая характеризует критическое состояние САР на грани устойчивости при использовании частотного критерий Найквиста.
Значения  и
и  определяются свойствами объекта или регулятора. Например, для системы с типовым статическим объектом и ПИД- регулятором рассматриваемая система уравнений может быть представлена в следующем виде:
определяются свойствами объекта или регулятора. Например, для системы с типовым статическим объектом и ПИД- регулятором рассматриваемая система уравнений может быть представлена в следующем виде:
 .
.
Решение задачи реализовано с помощью программы «Расчёт параметрической области устойчивости». В компьютер вводятся данные о свойствах объекта  и указывается анализируемый вариант комплектования системы с применением П-, ПИ- или ПИД - регулятора. Результаты расчёта выдаются в виде таблицы и графика, который отражает функциональную зависимость положения границы устойчивости конкретной системы от параметров настройки регулятора (рис.2.24).
и указывается анализируемый вариант комплектования системы с применением П-, ПИ- или ПИД - регулятора. Результаты расчёта выдаются в виде таблицы и графика, который отражает функциональную зависимость положения границы устойчивости конкретной системы от параметров настройки регулятора (рис.2.24).
Рассчитываемые характеристики являются основным ориентиром при подборе нужных настроек регулятора, значение которых фиксируется положением «рабочей точки» (РТ) в пределах области устойчивости. Положение этой точки относительно границы устойчивости. Положение этой точки относительно границы устойчивости определяет характер переходного процесса в системе (рис.2.24).
Работа анализируемой системы при выбранных настройках регулятора проверяется с помощью программы «Расчёт переходного процесса». По найденной кривой , как это показано на рис.2.25, оценивается качество регулирования. При этом следует иметь в виду, что указанные на этом рисунке символы Т1, Х1, Т2 и Х2 отражают выявляемые компьютером координаты двух первых экстремальных точек. Степень перерегулирования  определяется лишь в том случае, если
определяется лишь в том случае, если  кривая 2, рис.2.25).
кривая 2, рис.2.25).

Рис.2.24. Рассчитанные АФХ запроектированной системы с ПИ-регулятором:  объекта;
объекта;  - выбранного ПИ- регулятора с найденными параметрами его настройки;
- выбранного ПИ- регулятора с найденными параметрами его настройки;  - условно разомкнутой системы;
- условно разомкнутой системы;  - запас устойчивости по модулю;
- запас устойчивости по модулю;  запас устойчивости системы по фазе
запас устойчивости системы по фазе
Если выявленное качество регулирования не отвечает заданным требованиям, то с использованием области устойчивости анализируемой системы значения настроек регулятора корректируются и расчёт кривой переходного процесса повторяется.
Затем с помощью программы «Расчёт частотных характеристик» определяются амплитудно – частотные и фазочастотные характеристики объекта, регулятора и условно разомкнутой системы. По результатам расчёта на плоскости комплексного переменного, как показано на рис.2.24, строятся годографы АФХ объекта , регулятора и условно разомкнутой системы .
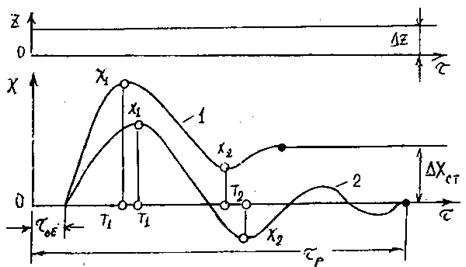 Рис.2.25.Кривые переходных процессов при работе системы в режиме стабилизации: 1 – при использовании П- регулятора; 2- ПИД- регулятора; o- первые две экстремальные точки, координаты которых
Рис.2.25.Кривые переходных процессов при работе системы в режиме стабилизации: 1 – при использовании П- регулятора; 2- ПИД- регулятора; o- первые две экстремальные точки, координаты которых  и
и  указываются при изображении рассчитываемой кривой; ·- точки, принимаемые за конец переходного процесса в системе
указываются при изображении рассчитываемой кривой; ·- точки, принимаемые за конец переходного процесса в системе
Основой построения таких характеристик является выбор нужного масштаба реальной оси координат, отмеченной символом  . Ориентиром могут служить значения
. Ориентиром могут служить значения  или при
или при  , значение
, значение  и удобная для изображения графика величина безразмерного отрезка, равного -1 (рис.2.24). Принятые масштабы реальных шкал используются для определения длина векторов ,
и удобная для изображения графика величина безразмерного отрезка, равного -1 (рис.2.24). Принятые масштабы реальных шкал используются для определения длина векторов ,  и
и  . Их положение на графиках с полярной системой координат определяется величинами ,
. Их положение на графиках с полярной системой координат определяется величинами ,  и
и  , которые характеризуют значения углов в градусах, откладываемых от положительного направления реальной оси. При значениях
, которые характеризуют значения углов в градусах, откладываемых от положительного направления реальной оси. При значениях  углы откладываются по часовой стрелке, а если
углы откладываются по часовой стрелке, а если  , то – против часовой стрелки.
, то – против часовой стрелки.
Годограф АФХ условно разомкнутой системы используется для оценки устойчивости с помощью критерий Найквиста. Если система устойчива, то годограф функции не должен охватывать критическую точку с координатами -1; 0. При правильно выбранных настройках регулятора при значениях модуля  и фазы
и фазы  .
.
Процесс управления заданной точностью исполнения технологического процесса и его производительностью состоит из этапов подготовки, статической и динамической настроек системы.
На стадии подготовки к выполнению технологического процесса оператором в купе с ЭВМ учитываются все наиболее важные нюансы предыдущего исполнения технологических операций и состояния объекта. На САУ в эксплуатационных условиях помимо управляющих сигналов всегда действуют возмущения. Поведение системы определяется совместным действием всех сигналов.
Не всегда управляющее воздействие можно считать известной функцией времени. Ещё в большей степени это относится к возмущению, или помехе, которая, как правило, является неизвестной функцией времени. Вместе с полезным сигналом на вход следящей системы сопровождения приходит и помеха. Возникающие при этом внешние помехи вызывают эффект замирания в системе управления. В системе сопровождения могут существовать и внутренние помехи, возникновение которых может быть связано, например, с флуктуациями напряжений и тока, подачи топлива и воздуха и т.д.
Случайные возмущения возникают и со стороны нагрузки вследствие её изменения. Например, в случаях, когда системы предназначены для регулирования подачи энергии или топлива в печи, случайные изменения нагрузки возникают при увеличении или уменьшении числа потребителей энергии или топлива.
В реальных условиях управляющий сигнал и возмущения являются случайными и могут быть описаны с помощью статистических методов. Так как реакция системы на случайные воздействия имеет случайный характер, то оценка динамических свойств системы требует применения статистических методов.
Статическая настройка – это процесс первоначального установления точности относительного и движения исполнительных механизмов. В нагревательных печах статическая настройка реализуется следующими методами: установление координат размещения заготовок относительно генераторов тепла, внутренней поверхности ограждения печи и относительно механизмов подачи заготовки в печь и выгрузки из неё и т.д.
В плавильных, как и в прочим в нагревательных, печах реализация статической настройки реализуется в установлении на предварительном этапе расхода электроэнергии, газообразного топлива и т.д.
В процессе осуществления технологического процесса первоначально установленная точность статической настройки теряется, что обусловлено действием различных погрешностей систематического и случайного характера. Исправлению этих неточностей способствует статические поднастройка и перенастройка.
Динамическая настройка является этапом формирования модели точности воспроизведения данного технологического процесса. Этапу сопутствуют многообразные тепловые, химические и разного рода динамические процессы. Влияние любых факторов на точность обработки проявляется через размерные связи технологической системы. Действие этих факторов приводит к изменению текущей физико – химической обстановки в нагревательном или плавильном агрегате, состояния самих агрегатов. Результатом является отклонение от заданной при статической настройке точности проведения технологического процесса. Это отклонение является переменным и изменяется случайно или по определённому закону в функции времени и координат.
Пример статической настройки рассмотрим на примере автоматической системы поддержания уровня воды в паровом котле, который работает под давлением 1,5 МПа при использовании аппаратуры комплекса «Контур -2» с передачей собираемых данных на ПМК.
Исходные данные для выполнения этой задачи приведены в табл.2.6.
Методика исследований основана на применении компьютера, новой характеристики «Параметрическая область устойчивости» и пакета вычислительных программ. На основании их применения находим критические значения коэффициента передачи и статической ошибки  , которые характеризуют состояние системы на границе устойчивости.
, которые характеризуют состояние системы на границе устойчивости.
| Регулируемая величина Х, единица измерения и предельные значение | Параметры модели объекта | Предельные значения показателей регулирования | Возмущение | |||||

|
| 
| 
| 
| 
| 
| 
| |
Уровень воды в котле, 
| 0,2 | 0,25 | 0,10 |
 По данным о найденном значении коэффициента
По данным о найденном значении коэффициента  построен график (рис.2.27), с помощью которого были подобраны анализируемые настройки П - регулятора
построен график (рис.2.27), с помощью которого были подобраны анализируемые настройки П - регулятора  и
и  , указанные на рис.2.26 положением рабочих точек
, указанные на рис.2.26 положением рабочих точек  и
и  . Первая анализируемая настройка была выбрана при
. Первая анализируемая настройка была выбрана при  , а вторая – при
, а вторая – при  .
.
Рис.2.26.Параметрическая область устойчивости анализируемой системы с П – регулятором (законом): - и - рабочие точки, отражающие выбранные варианты настройки регулятора
С помощью программы «Расчёт переходного процесса» были получены данные, необходимые для оценки качества регулирования при разных настройках регулятора. Результаты выполнения расчётов указаны в табл.2.6 и 2.7, а построенные по цифровым данным графики изображены на рис.2.26. Штриховкой показана ширина зоны нечувствительности регулятора  , а значком * - моменты времени, принятые за окончание процесса регулирования.
, а значком * - моменты времени, принятые за окончание процесса регулирования.
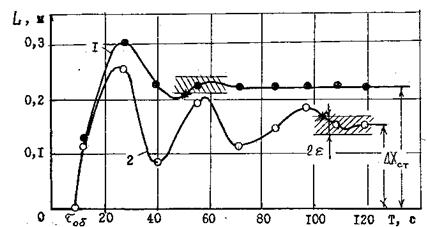
Рис.2.27. Кривые переходного процесса в системе с П- регулятором при двух вариантах его настройки: 1 - (  ); 2 - ()
); 2 - ()
Вычисленные показатели качества регулирования указаны в табл.2.8. Их анализ говорит о том, что П – регулятор непригоден для настраевой системы управления, т.к. величины и  превышают допустимые значения и .
превышают допустимые значения и .
Результаты расчёта параметрической области устойчивости рассматриваемой системы с ПИ-регулятором представлены в табл.2.9 и на рис.2.28. С использованием найденных зависимостей были подобраны следующие варианты настроек ПИ-регулятора: вариант ( );вариант (
);вариант ( ).
).








