 2014-02-03
2014-02-03 1281
1281При реализации синхронного обмена вместе с данными посылается синхросигнал, который используется приемником для стробирования данных (рис. 2.30).

Рис. 2.30 - Форма сигналов при синхронной передаче данных.
Типичная схема для преобразования последовательных данных в параллельные показана на рис. 2.31. В этой схеме используются две микросхемы 8-разрядных регистров типа 74LS374. Для большинства приложений не требуется включение второго регистра. Это преобразование может также быть выполнено с помощью специальной микросхемы, но некоторые предпочитают использовать 8-разрядные регистры, так как их обычно легче найти, чем другие типы микросхем ТТЛ.
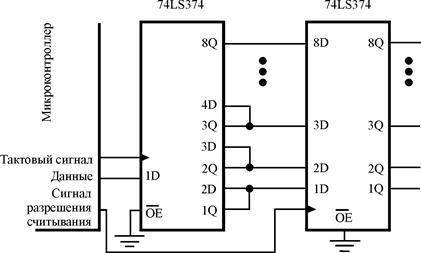
Рис. 2.31 - Схема преобразования последовательных данных в параллельные.
Существует два основных протокола для синхронной связи: Microwire и SPI. Эти методы применяются для взаимодействия с различными микросхемами, (таких как последовательный EEPROM в BASIC Stamps). Хотя стандарты Microwire и SPI очень похожи, существуют некоторые различия, о которых необходимо упомянуть.
Данные протоколы чаще используются для синхронной последовательной передачи данных, чем для объединения микроконтроллеров в единую сеть. В этих протоколах каждое устройство адресуется индивидуально, хотя линии передачи данных и синхронизации могут быть общими для многих устройств. Если сигнал разрешения выборки (chip select) устройства не активен, то это устройство игнорирует линии данных и синхронизации. В каждый момент времени только одно из подключенных к тине устройств может быть ведущим (master), то есть иметь возможность задавать режим работы шины (рис 2.33).
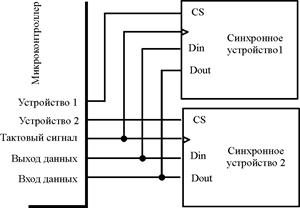
Рис. 2.32 - Синхронная последовательная шина.
Если синхронный последовательный порт встроен в микроконтроллер, то передающая схема имеет вид. показанный на рис 2.34.
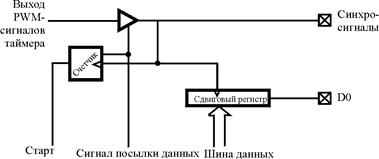
Рис. 2.33 - Схема синхронного вывода данных.
Эта схема выводит 8-разрядные данные. При реализации протоколов, аналогичных стандарту Microwire, где сначала выдается старт-бит, этот бит посылается с помощью команд чтения и записи в порт ввода-вывода. Похожая схема используется для приема данных, где поступающие данные сначала последовательно вводятся в сдвиговый регистр и затем считываются микроконтроллером.

