2014-02-24
2014-02-24 1482
1482Раздел 3 Электрические машины
Лектор Юсупов Р.З.
1.1. Устройство
Асинхронные машины (АМ), как и другие электрические машины, обратимы и могут работать в качестве как двигателя, так и генератора. Как правило, асинхронные машины используются в качестве двигателей (асинхронные двигатели - АД).
Конструктивное устройство асинхронной машины показано на рисунке 1.
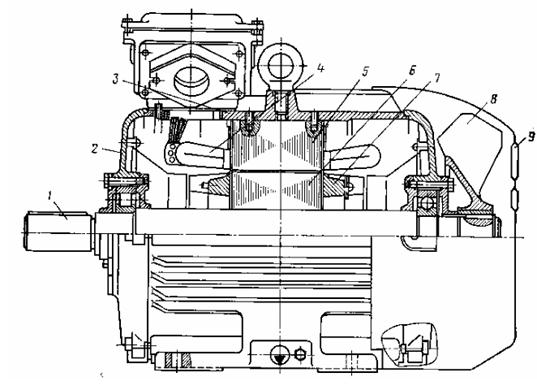
1-вал; 2-подшипниковый щит; 3-корпус статора; 4-обмотка статора; 5-сердечник статора; 6-сердечник ротора; 7-обмотка ротора (короткозамкнутая);8-вентилятор; 9-кожух вентилятора
Рисунок 1 - Асинхронный двигатель с короткозамкнутым ротором
Неподвижная часть машины называется статором, подвижная часть - ротором. Сердечники статора и ротора асинхронных машин собираются (шихтуются) из отдельных листов электротехнической стали (рисунок 2).
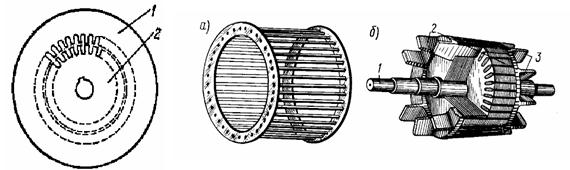
1 – статор, 2 - ротор
Рисунок 2 Рисунок 3
На внутренней поверхности статора и на внешней поверхности ротора имеются пазы, в которых размещаются проводники обмоток.
Обмотка статора выполняется трехфазной, подсоединяется к сети трехфазного тока и называется первичной обмоткой.
К конструктивным частям статора относятся: станина, в которую устанавливается магнитопровод, и подшипниковые щиты, служащие для поддерживания вала.
Воздушный зазор между статором и ротором в асинхронных машинах выполняется минимально возможным по условиям производства и надежности работы. В машинах мощностью в несколько киловатт величина зазора составляет около 0,5 мм, с ростом мощности и габаритов машины величина зазора увеличивается. Обмотка ротора может быть выполнена трехфазной аналогично обмотке статора. Концы фаз такой обмотки ротора соединяются обычно в «звезду», а начала с помощью контактных колец и металлографитных щеток выводятся наружу. Такая асинхронная машина называется машиной с фазным ротором. К контактным кольцам обычно присоединя- ется трехфазный пусковой или регулировочный реостат. Фазная обмотка ротора выполняется с тем же числом полюсов, как и статорная обмотка.
Другая разновидность обмотки ротора - обмотка в виде беличьей клетки (рис.3). Концы стержней такой обмотки с обоих торцов соединены накоротко кольцами, поэтому обмотка выводов не имеет. Такая асинхронная машина называется машиной с короткозамкнутым (к.з.) ротором. В машинах мощностью до 100 кВт обмотка ротора выполняется путем заливки алюминием. В более крупных машинах применяется медная сварная обмотка. Отсутствие скользящего контакта на роторе обеспечивает высокую надежность работы такого двигателя, а простота технологии изготовления - дешевизну. По этим причинам асинхронные двигатели с к.з. ротором находят широкое применение и составляют основной парк электрических машин.
Следует отметить, что обе эти конструкции трехфазного асинхронного двигателя были изобретены М.О. Доливо-Добровольским в 1891 г. и сохранили по существу предложенный им вид.
1.2 Работа асинхронной машины
Работа асинхронной машины (АМ) основана на взаимодействии вращающегося магнитного поля статора с индуктированными в к.з. обмотке ротора токами.
Наибольшее распространение получили асинхронные двигатели (АД).
При питании обмотки статора асинхронного двигателя трехфазным током создается вращающееся магнитное поле. Поэтому в АД отсутствует обмотка возбуждения, а на роторе расположена m-фазная к.з. обмотка.
Частота n1 вращения магнитного поля статора АД определяется тем, что вращающееся магнитное поле создается при питании обмотки статора, имеющей p пар полюсов, трехфазным током частотой f1. Следовательно, синхронная частота no=n1=60f1/p.
Симметричная система токов обмотки статора (рисунок 4) определяет возникновение кругового поля, обеспечивающего наибольший вращающий момент.
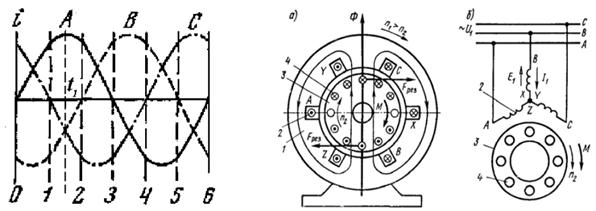
Рисунок 4
Вращающийся магнитный поток Ф1 индуктирует ЭДС в обмотке ротора. Поскольку обмотка ротора замкнута, то возникает система токов ротора I2 и создается вращающийся поток ротора Ф2. Поток ротора вращается относительно статора в ту же сторону и с той частотой n1 , что и поток статора Ф1 и имеет то же количество полюсов, но ориентирован, согласно правилу Ленца, практически ему навстречу. В результате взаимодействия неподвижных друг относительно друга потоков статора и ротора образуется результирующий поток Ф. Взаимодействие потока Ф и тока ротора приводит к возникновению электромагнитных сил и электромагнитного момента.
В режиме двигателя под действием этого момента ротор вращается в сторону вращения магнитного поля. В режиме генератора ротор вращается с помощью приводного двигателя со скоростью n > n1 , при этом ЭДС обмотки статора превышает напряжение сети, и машина отдает энергию в сеть.
Частота вращения n ротора асинхронной машины всегда отлична от частоты вращения магнитного поля n1, которую называют синхронной. Отсюда происходит название машины - асинхронная, т.е. несинхронная, в которой n ≠ n1. В противном случае проводники ротора не будут пересекаться магнитными линиями вращающегося поля, в них не будет индуктироваться ЭДС, не будет возникать тока ротора и момента.
Отличие частоты вращения ротора n и магнитного поля n1 характеризуется скольжением s=(n1-n)/n1. Скольжение может выражаться в относительных единицах или процентах.
Электромагнитный момент АД (упрощенная формула):
| M = C м | U2 1 R 2 S | . |
| R 22+(SX 2)2 |
где U 1 – напряжение статора; R 2 – активное сопротивление обмотки ротора; S – скольжение; X 2 – индуктивное сопротивление ротора, С - конструктивный коэффициент.
Из полученного выражения для электромагнитного момента следует, что он сильно зависит от подведенного напряжения (M ∼ U 12). При снижении, например, напряжения на 10%, электромагнитный момент снизится на 19% (M ∼(0,9 U 1)2=0.81 U 12). Это является одним из недостатков асинхронных двигателей, так как приводит на производстве к снижению производительности.
ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ
Механическая характеристика. Механической характеристикой называется зависимость частоты вращения двигателя от вращающего момента n2 = f(M) при U1 = const.
w2 = f (M) n 2 = f (M)
w2 = (1 – s) w1 n 2 = (1 – s) n 1
Рабочие характеристики. Изменение различных электрических и механических параметров двигателя в нормальном режиме описывается рабочими характеристиками, под которыми понимают зависимости n2, s,M2, I1 , cos ,
,  от мощности P2 валу двигателя при U1 = const и f = const.
от мощности P2 валу двигателя при U1 = const и f = const.