 2014-02-09
2014-02-09 4149
4149Проблема помехоустойчивости передачи информации.
Элементы теории обнаружения, различения, оценки и фильтрации сигналов.
Любая радиотехническая система передачи информации всегда подвержена воздействию помех.
Они могут быть:
- внутренними;
- вешними.
- естественного происхождения;
- искусственного происхождения.
- стационарными;
- нестационарными.
- гауссовскими;
- негауссовскими.
- узкополосными;
- широкополосными.
- аддитивными;
- мультипликативными.
- большой мощности;
- малой мощности.
Полностью избавиться от их влияния нельзя.
Поэтому борьба с помехами с целью, обеспечения нормального функционирования системы передачи информации, была и остается приоритетной задачей радиотехники.
Сущность проблемы помехоустойчивости заключается в создании(синтезе) системе передачи информации, наилучшим образом противостоит воздействию помех. При этом речь идет о выработке целого комплекса рекомендаций, включая:
1) выбор вида сигнала (модуляции).
2) способа передачи.
3) выбора канала связи.
4) способа приема и обработки информации.
Общие рекомендации по этой проблеме дает наука, которая называется теория информации, однако они либо в принципе не реализуемы, либо очень трудно реализуемы.
В радиотехнике и связи часто применяют более узкий подход к решению проблемы помехоустойчивости, а именно ставят задачу оптимизации приема сигнала при заданном способе передачи. Этому посвящен раздел статистической радиотехники – теория оптимизации приема. Заметим, что в зависимости от задачи, решаемой при приеме (обнаружения сигнала, различения сигнала, оценка параметров сигнала, распознавание сигнала и т.д), а также в зависимости от вида сигнала и помех применяются различные критерии оптимальности, и соответственно даются различные рекомендации.
В настоящее время теория оптимального приема достаточно хорошо разработана и имеет в своем активе ряд оптимальных методов для различной сигнально – помеховой обстановке.
Далее рассмотрим некоторые типовые задачи оптимального радиоприема.
Рассмотрим простейшую задачу обнаружения, а именно обнаружения полностью известного сигнала на фоне аддитивной стационарной гауссовской помехи в виде белого шума. При этом воздействие на обнаружитель (приемник обнаружения) можно представить в виде:
 ,
,
где X(t) - помеха;
s(t) – сигнал;
A – условие;
рассматриваемый обнаружитель должен выдавать решение, либо в виде “нет” , либо в виде “да”
, либо в виде “да”  .
.
Решение:

Ввиду случайного характера помехи X(t) эта задача является статистической и при её решении возможны 4 ситуации (при двух условиях два решения).
Ситуации:
1)  – правильное не обнаружение.
– правильное не обнаружение.
2)  – ложная тревога(ошибочное обнаружение).
– ложная тревога(ошибочное обнаружение).
3)  – пропуск сигнала (ошибочное не обнаружение).
– пропуск сигнала (ошибочное не обнаружение).
4)  – правильное не обнаружение.
– правильное не обнаружение.
Каждую из этих ситуаций можно охарактеризовать с соответствующей вероятностью ситуации  и соответствующим риском( или стоимостью ошибки, штрафом)
и соответствующим риском( или стоимостью ошибки, штрафом)  .
.
 ;
;  - нет ошибки.
- нет ошибки.
Введем понятие средний риск (математическое ожидание риска).
 (2)
(2)
Выразим вероятности:
 (3)
(3)
где  – вероятность отсутствия сигнала в воздействии(априорная вероятность).
– вероятность отсутствия сигнала в воздействии(априорная вероятность).
 – условная вероятность принятия решения “да” при отсутствии сигнала.
– условная вероятность принятия решения “да” при отсутствии сигнала.
 – вероятность присутствия сигнала в воздействии.
– вероятность присутствия сигнала в воздействии.
 – условная вероятность принятия решения “нет” при наличии сигнала.
– условная вероятность принятия решения “нет” при наличии сигнала.
Обозначим:
 - вероятность поисковой тревоги.
- вероятность поисковой тревоги.
 - вероятность пропуска сигнала.
- вероятность пропуска сигнала.
D=1-H - вероятность правильного обнаружения.
С учетом выражения (3):

 - весовой множитель.
- весовой множитель.
Как видим, средний риск определяется вероятностями ложной тревоги F, вероятностью пропуска сигнала, стоимостью ошибок  ,
,  и вероятностью отсутствия и присутствия сигнала в воздействия.
и вероятностью отсутствия и присутствия сигнала в воздействия.
Существуют различные критерии оптимальности обнаружения, учитывающие априорную информацию о наличии и отсутствии сигнала, а также допустимые значения F и H и стоимости ошибок для конкретных применений.
Наиболее общим критерием оптимальности является критерий минимума среднего риска (оптимальным считается такой обнаружитель, у которого  (4)).
(4)).
Перепишем выражение для среднего риска в виде

где  – весовая разность.
– весовая разность.
Критерий оптимальности (4) можем заменить критерием максимума весовой разности:
 (5)
(5)
Т.к. в соответствии с постав ленной задачей оптимальный обнаружитель записан по результатам анализа воздействия u(t) выработать либо решение “да” либо решение “нет”, то его можно охарактеризовать решающей функцией:
Определим алгоритм работы оптимального обнаружителя.
Для этого обозначим плотность вероятности напряжения u(t) при отсутствии сигнала как  , если А=0, плотность вероятности u(t) при наличии сигнала
, если А=0, плотность вероятности u(t) при наличии сигнала  , если А=1.
, если А=1.
Используя обозначения:
 (7)
(7)
 (6)
(6)

 - отношение правдоподобия.
- отношение правдоподобия.
 - показывает насколько правдоподобнее предположение о наличии сигнала в воздействии u(t), чем предположение об отсутствии сигнала в воздействии u(t).
- показывает насколько правдоподобнее предположение о наличии сигнала в воздействии u(t), чем предположение об отсутствии сигнала в воздействии u(t).
Напомним, что критерий оптимальности обнаружения:
Из выражения (8) следует, что эта разность будет максимальна, когда  будет неотрицательной.
будет неотрицательной.
Это дает возможность записать выражение для решающей функции:
 (9)
(9)
Фактически уравнение (9) описывает алгоритм работы оптимального обнаружителя полностью известного сигнала. В соответствии с этим выражением (9) можно изобразить структурную схему оптимального обнаружителя:
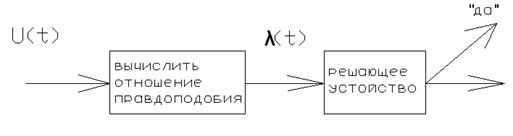
Порог обнаружения определяется:


