 2014-02-09
2014-02-09 12387
12387Система координатных перемещений (система координат) манипулятора определяет кинематику основных движений и форму рабочей зоны. К основным движениям относят все движения манипуляционной системы без учета движения захвата детали, ориентирующих движений и дополнительных перемещений основания промышленного робота.
Системы координат бывают двух видов: прямоугольные и криволинейные.
В прямоугольной системе координат (плоская и пространственная) объект манипулирования помещается в определенную точку пространства робота путем прямолинейных перемещений звеньев механической системы промышленного манипулятора по трем (или двум) взаимно перпендикулярным осям.
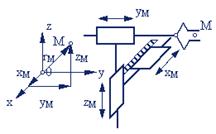
В криволинейной системе координат наиболее распространенные координаты: плоские полярные (перемещение объекта происходит в одной координатной плоскости в направлении радиус-вектора r и угла φ); цилиндрические, характеризующиеся перемещением объекта в основной координатной плоскости в направлениях r и φ, а также по нормали к ней z; сферические (полярные), где перемещения объекта манипулирования в пространстве осуществляется за счет линейного движения руки промышленного робота на величину r и ее угловых перемещений φ и θ в двух взаимно перпендикулярных плоскостях.
|
|
|
Разновидностью криволинейной системы координат является ангулярная (угловая) плоская или пространственная (цилиндрическая и сферическая) система координат, характерная для движений многозвенных шарнирных рук промышленных роботов и манипуляторов.
В ангулярной плоской системе координат объект манипулирования перемещается в координатной плоскости благодаря относительным поворотам звеньев руки, имеющих постоянную длину. Ангулярная цилиндрическая система характеризуется дополнительным смещением относительно основной координатной плоскости в направлении перпендикулярной к ней координаты z. В ангулярной сферической системе координат перемещение объекта в пространстве происходит только за счет относительных угловых поворотов руки, при этом хотя бы одно звено имеет возможность поворота на углы φ и θ в двух взаимно перпендикулярных плоскостях.
Примеры соответствующих структурных кинематических схем промышленных роботов показаны в таблице.
| Тип | Изображение | Кинематическая схема |
| Декартовый |  |
 |
| Цилиндрический |  |
 |
| Сферический |  |
 |
| Ангулярный |  |
 |
| Скара |  |
Основные технические показатели промышленных роботов
Основные технические показатели промышленных роботов (ГОСТ 25378-82) определяются предполагаемой областью применения и условиями производства, для которых предназначается робот.
|
|
|
Большинство технических показателей манипулятора описывают, в первую очередь, его собственные свойства. Собственные свойства робототехнической системы бывают двух видов: механические и алгоритмические. Механические свойства связаны с конструктивным исполнением манипулятора, в то время как алгоритмические свойства связаны с реализацией его системы управления.
Число степеней подвижности манипулятора – сума возможных координатных движений объекта манипулирования относительно опорной системы (стойки, основания) робота.
Рабочее пространство манипулятора – пространство, в котором может находиться исполнительный орган робота в момент работы.
Зона обслуживания манипулятора – часть рабочего пространства, где полностью сохраняются заданные (паспортные) значения технических характеристик манипулятора.
Достижимость – является одним из важных геометрических свойств манипуляционной системы, представляющим количественную оценку величины объема рабочего пространства.
Границы достижимости манипуляционной системы – границы рабочего пространства, т.е. границы до которых робот может дотянуться своей характерной точкой (исполнительным органом).
Манипулятивность – свойство манипулятора правильно ориентировать захватное устройство. По мере приближения захвата к границам рабочего пространства, свойство манипулятивности уменьшается, а на границе достижимости полностью утрачивается.
Мобильность - свойство манипулятора, оценивающее достижимую скорость перемещения характерной точки захвата в рабочем пространстве. В каждой конфигурации манипуляционной системы достижимые скорости захвата составляют определенный интервал, ограничиваемый возможностями приводов отдельных звеньев. От конфигурации к конфигурации этот интервал меняется. Свойство мобильности позволяет оценить – удовлетворяют ли требованиям двигательной задачи, предъявляемой роботу, кинематические характеристики его манипулятора.
Приемистость – свойство, оценивающее ускорение характерной точки захвата манипулятора в момент его трогания из положения покоя. Достижимые ускорения, как и достижимые скорости, в каждой конфигурации манипуляционной системы составляют определенный интервал. Однако величины интервалов достижимых ускорений зависят не только от возможностей приводов, но еще и от инерционных параметров звеньев манипулятора.
Точность (Погрешность позиционирования) – отклонение заданной позиции исполнительного механизма от фактической при многократном позиционировании (повторении движения). Погрешность позиционирования может оцениваться в линейных или угловых единицах. Применительно к промышленному роботу важным показателем является суммарная погрешность позиционирования всех исполнительных механизмов, приведенная к фактическому положению объекта манипулирования, отличающемуся от заданного по программе работы. Такой показатель называют погрешностью позиционирования рабочего органа манипулятора.
Погрешность отработки траектории рабочего органа манипулятора – отклонение фактической траектории от заданной по программе.
Податливость – свойство исполнительной системы реагировать на управляющие воздействия. Это свойство сильно влияет на точность манипулятора.
Грузоподъемность манипулятора – наибольшая масса объектов манипулирования (включая массу захватного устройства), которые могут перемещаться манипулятором при заданных условиях (при максимальной или минимальной скорости, при максимальном разворачивании звеньев и т.д.).
Экономность
Быстродействие
Основные собственные свойства манипуляционных систем представлены в таблице.
|
|
|
| Собственные свойства системы | Элементарная операция | ||
| Механические | Достижимость | Геометрические | Позиционирование |
| Манипулятивность | Ориентирование | ||
| Точность | Точностное | Позиционирование, ориентирование | |
| Мобильность | Кинематические | Смещение | |
| Приемистость | Трогание | ||
| Податливость | Статические | Нагружение | |
| Грузоподъемность | Удержание | ||
| Мнемоничность | Управленческие | Перемещение | |
| Алгоритмические | Экономность | ||
| Быстродействие |
Перечисленные свойства не являются исчерпывающим набором собственных свойств манипуляционной системы. В частности, не рассматриваются частотные и диссипативные свойства. Из числа свойств, которые могут характеризовать динамические качества манипуляционной системы, рассматривается только приемистость. Вообще, динамические свойства манипуляционных систем почти не затрагиваются, что связано с тем, что круг их настолько обширен и трудоемок, что требует отдельного рассмотрения. Т.е. ограничимся кинематическим анализом и синтезом.

