 2014-02-09
2014-02-09 1365
1365Тема 7. (4 ч., СРС 2 ч.)
Автоматическое управление траекторией может использоваться на всех этапах полета. Простейшими являются контуры раздельной стабилизации высоты и скорости полета самолета. В этих контурах текущие значения регулируемого параметра поддерживаются относительно уровня, задаваемого летчиком. В более сложных режимах управления требуемая траектория полета определяется в БЦВМ. В качестве измерителей координат и скорости полета применяются барометрические и радиотехнические высотомеры, инерциальные системы, доплеровские измерители скорости, а также наземные радиотехнические средства. В БЦВМ навигационного комплекса на основе информации навигационных систем вычисляются отклонения от заданной траектории. В зависимости от этих отклонений в ВУ системы траекторного управления (СТУ) формируются команды на изменение углового положения самолета (в частности, угла тангажа) и определяется режим работы двигателя.
Т.о. в СТУ можно выделить внутренний контур (ВК) управления, выполняющий исполнительные функции. Таким ВК при управлении продольным движением является система стабилизации угла тангажа или система стабилизации нормальной перегрузки, а при управлении боковым движением системы стабилизации углов рыскания или крена.
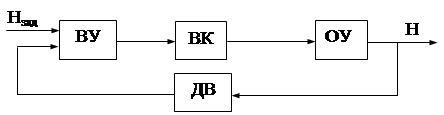
Режим стабилизации высоты является одним из основных рабочих режимов. Основной координатой управления в СУН (АПН) является отклонение центра тяжести самолета от заданной высоты полета, которое может быть измерено барометрическим корректором высоты, радиовысотомером или инерциальной системой. Типовая функциональная схема системы стабилизации высоты полета имеет вид:
 | |||
|
Где: ВК – контур стабилизации угловых движений (перегрузки или угла тангажа);
ОУ – кинематические соотношения, связывающие параметры движения центра масс (Н и V) с параметрами движения вокруг центра масс;
ВУ – вычислительное устройство;
ДВ – датчик высоты.
При расчете параметров СУН обычно принимают в качестве заданных следующие требования: перерегулирование не должно превышать 10-20 % от величины заданного значения изменения высоты полета, выход на которую должен осуществляться за минимальное время.

