 2015-01-30
2015-01-30 534
534Рассмотрим задачу синтеза адаптивного управления для случай каскадного соединения нелинейных подсистем, когда выход одной подсистемы можно рассматривать в качестве управляющего воздействия для другой подсистемы. К данному виду относятся многие технические и технологические системы управления и в ряде случаев могут быть к ним приведены с помощью эквивалентных преобразований.
Пусть  является регулируемой координатой для ОУ представленного каскадной системой дифференциальных уравнений:
является регулируемой координатой для ОУ представленного каскадной системой дифференциальных уравнений:
 (2.7)
(2.7)
где  – вектор неизвестных априори параметров системы,
– вектор неизвестных априори параметров системы,  – гладкие функции своих аргументов.
– гладкие функции своих аргументов.
Ставится задача построения закона управления
 , (2.8)
, (2.8)
при котором в замкнутой системе при произвольных ограниченных внешних воздействиях  обеспечивается заданная точность:
обеспечивается заданная точность:
 при
при  . (2.9)
. (2.9)
Известны различные подходы к решению данной задачи. Наиболее распространенной стратегией отыскания закона управления (2.8) является двухэтапный синтез. На первом этапе ставится задача отыскания обратной связи вида
|
|
|
 , (2.10)
, (2.10)
обеспечивающей достижение целей управления при условии, что значения  известны. На втором этапе вектор в выражении (2.10) формально заменяют оценкой
известны. На втором этапе вектор в выражении (2.10) формально заменяют оценкой  , которая строится с помощью уравнения
, которая строится с помощью уравнения
 , (2.11)
, (2.11)
и находят уравнение (2.11), гарантирующее достижение цели управления с учетом ограничений задачи (неполноту информации, ограничение на управление и др.).
В этом случае задача синтеза адаптивного регулятора при соблюдении условий устойчивости системы разбивается на две независимые задачи. Это позволяет использовать известные методы синтеза управления (2.10) для нелинейных систем, и с другой стороны применять различные алгоритмы построения оценки (2.11).
В такой постановке задачи не рассматриваются возможности повышения качества процессов управления за счет учета динамики процесса адаптации (2.11) и построения соответствующего закона управления (2.8). Учет процесса адаптации при выборе закона управления относится к задачам прямого адаптивного управления, рассмотренных в работе [3]. Однако в [3] не учитывается влияние возмущений, которые существенно влияют на процесс адаптации. Ниже рассматривается подход к синтезу управления (2.8), совмещенного с процессом адаптации (2.11), при наличии возмущений с использованием принципа локализации [20], рассмотренного ранее в работе [14].
С целью выполнения условия (2.9) для регулируемой координаты используем эталонную модель  и введем отклонение
и введем отклонение  , которое подчиним уравнению
, которое подчиним уравнению
 , (2.12)
, (2.12)
где  . Тогда из первого уравнения системы (2.7) с учетом
. Тогда из первого уравнения системы (2.7) с учетом  получим выражение
получим выражение
 . (2.13)
. (2.13)
Координату  с учетом (2.12) представим в виде:
с учетом (2.12) представим в виде:
|
|
|
 , (2.14)
, (2.14)
где  – неизвестная переменная,
– неизвестная переменная,  – вектор настраиваемых параметров, удовлетворяющий уравнению
– вектор настраиваемых параметров, удовлетворяющий уравнению
 . (2.15)
. (2.15)
Тогда придем к системе уравнений
 , (2.16)
, (2.16)
 , (2.17)
, (2.17)
где  , переменная выбирается из условия устойчивости
, переменная выбирается из условия устойчивости
 , (2.18)
, (2.18)
где  .
.
Если в дальнейшем удастся выполнить условие (2.18), то в уравнении (2.16) переменная  при
при  . Тогда выполняется условие
. Тогда выполняется условие  при , поскольку производная по времени функции Ляпунова
при , поскольку производная по времени функции Ляпунова
 . (2.19)
. (2.19)
Однако, относительно вектора  можно утверждать только, что
можно утверждать только, что  при .
при .
Выполняя последовательно указанные выше операции, получим выражение для  , от которого возьмем производную по времени. В результате получим выражение, в которое входят управление
, от которого возьмем производную по времени. В результате получим выражение, в которое входят управление  , известные
, известные  и неизвестные
и неизвестные  функции. При этом полагаем
функции. При этом полагаем  , где
, где  – является решением уравнения
– является решением уравнения
 , (2.20)
, (2.20)
 – компенсирует , а управление
– компенсирует , а управление  – компенсирует с помощью принципа локализации:
– компенсирует с помощью принципа локализации:
 .
.
Особенностью управления по сравнению с ранее рассмотренным способом синтеза в работе [14] является возможность оценивать вектор неизвестных параметров системы и проводить компенсацию известных функций, что позволяет снизить коэффициент усиления в выражении (2.20).
Для сравнения данного способа синтеза адаптивного управления рассмотрим тестовую задачу из работы [3].
Пример 2.1. Пусть задана система второго порядка
 (2.21)
(2.21)
где  ,
,  – неизвестные априори постоянные параметры,
– неизвестные априори постоянные параметры,  – ограниченное неизвестное возмущение, задается значение
– ограниченное неизвестное возмущение, задается значение  .
.
Уравнения (2.16), (2.17) будут иметь вид
 , (2.22)
, (2.22)
 , (2.23)
, (2.23)
где  , оценка
, оценка  является решением уравнения
является решением уравнения
 . (2.24)
. (2.24)
Производная переменной  с учетом (2.24) имеет вид
с учетом (2.24) имеет вид
 (2.25)
(2.25)
Оценка параметров  ,
,  осуществляется с помощью алгоритма
осуществляется с помощью алгоритма
 , (2.26)
, (2.26)
 . (2.27)
. (2.27)
Уравнение (2.25) перепишем в виде
 ,
,
где и – известное и неизвестное приведенные возмущения:
 ,
,
 .
.
Тогда получим адаптивный закон управления
 , (2.28)
, (2.28)
 . (2.29)
. (2.29)
Для вычисления можно воспользоваться приближенным выражением
 .
.
Проведем моделирование замкнутой системы (2.21), (2.26)-(2.29) при исходных данных принятых в работе [3]:  ,
,  ; возмущение отсутствует, т.е.
; возмущение отсутствует, т.е.  ; начальные условия
; начальные условия  ,
,  .
.
На рисунках 2.1-.2.4 приведены переходные процессы координат  , , управления и оценки точности идентификации параметров
, , управления и оценки точности идентификации параметров  , равной
, равной
 .
.
В работе [3] проведено сравнение различных алгоритмов управления и наилучшим признан алгоритм авторов, при котором время регулирования составляет  , спустя время
, спустя время  значение
значение  , значение критерия качества, характеризующего затраты энергии на управление
, значение критерия качества, характеризующего затраты энергии на управление  , при
, при  равно
равно  .
.
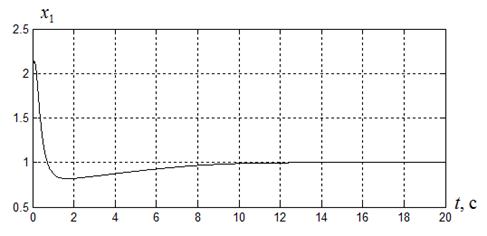
Рисунок 2.1
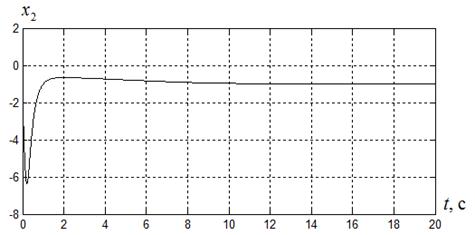
Рисунок 2.2
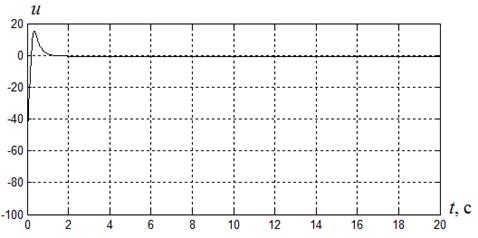
Рисунок 2.3
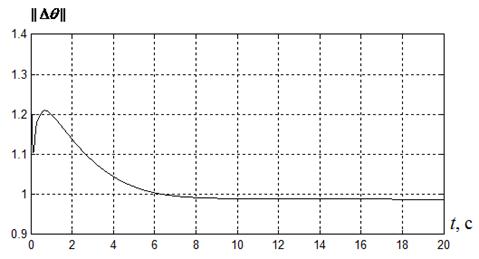
Рисунок 2.4
Как следует из рисунков 2.1-2.2 здесь при заданных параметрах  , введении ограничения на управление
, введении ограничения на управление  , получено время регулирования
, получено время регулирования  ,
,  ,
,  .
.
Также проводилось моделирование динамики системы при наличии возмущающего воздействия  . При этом переходные процессы рисунков 2.1-2.4 практически не изменились.
. При этом переходные процессы рисунков 2.1-2.4 практически не изменились.
Таким образом, предложенный закон управления (2.26)-(2.29) существенно превосходит указанные в работе [3] алгоритмы адаптивного управления объектом (2.21).
Продолжим рассмотрение данного примера, используя другой подход к синтезу управления на основе идентификации неопределенных возмущений в системе.
Исходную систему (2.21) перепишем в виде
 (2.30)
(2.30)
где  ,
,  – неизвестные воздействия.
– неизвестные воздействия.
Для решения задачи будем оценивать  для использования в законе управления, а воздействие
для использования в законе управления, а воздействие  подавлять с помощью управляющего сигнала .
подавлять с помощью управляющего сигнала .
Используем предложенный в работе [14] способ оценивания нерегулярных внешних воздействий. Здесь нетрудно показать, что наблюдающее устройство имеет вид
 , (2.31)
, (2.31)
 , (2.32)
, (2.32)
где  ,
,  ,
,  – выбираемые параметры.
– выбираемые параметры.
Введем отклонение  , которое подчиним уравнению
, которое подчиним уравнению
,
из которого найдем выражение  . Найдем производную по времени для отклонения
. Найдем производную по времени для отклонения  , которую представим в виде:
, которую представим в виде:
 ,
,
где  ,
,  .
.
Тогда закон управления будет иметь вид
|
|
|
 , (2.33)
, (2.33)
. (2.34)
Проведем моделирование замкнутой системы (2.30)-(2.34) при тех же исходных данных, для принятых параметров:  ,
,  ,
,  .
.
На рисунках 2.5-.2.8 приведены переходные процессы координат , , управления , ,  .
.
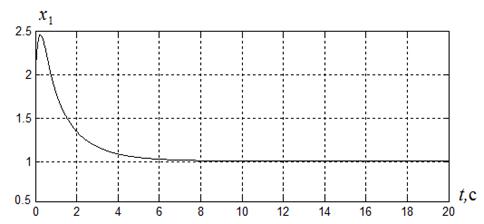
Рисунок 2.5
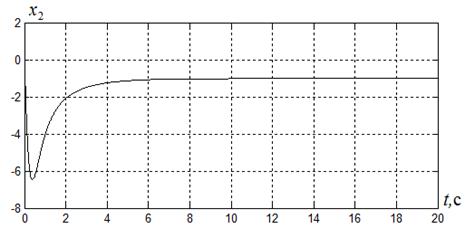
Рисунок 2.6
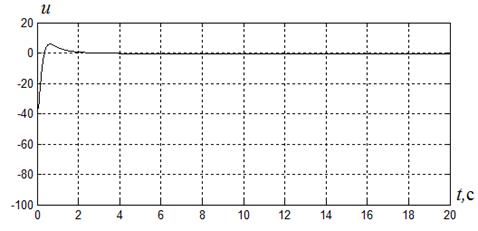
Рисунок 2.7
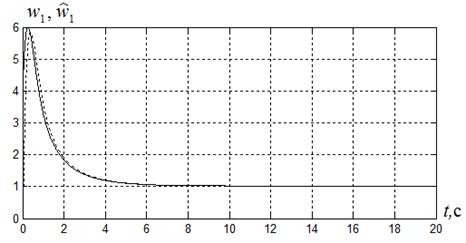
Рисунок 2.8
Как следует из рисунков 2.5-2.7 здесь при заданных параметрах  ,
,  и отсутствии в законе управления (2.33) компенсирующей составляющей
и отсутствии в законе управления (2.33) компенсирующей составляющей  , управление ограничено, т.е.
, управление ограничено, т.е.  . При этом время регулирования , а значение критерия
. При этом время регулирования , а значение критерия  . При учете в управлении (2.33) компенсирующей составляющей переходные процессы не изменяются, кроме управляющего сигнала , который ограничен неравенством , при этом значение критерия
. При учете в управлении (2.33) компенсирующей составляющей переходные процессы не изменяются, кроме управляющего сигнала , который ограничен неравенством , при этом значение критерия  .
.
На рисунке 2.8 приведены для сравнения графики и (пунктирная линия), иллюстрирующие работоспособность алгоритма оценивания возмущения.
Также проводилось моделирование динамики системы при наличии возмущающего воздействия . При этом переходные процессы рисунков 2.5-2.7 практически не изменились.
Таким образом, предложенный закон управления (2.31)-(2.34) проще закона управления (2.26)-(2.29) и требует в 3 раза меньше энергетических затрат. Кроме того данный способ синтеза управления применим к более широкому классу нелинейных систем, чем рассмотренная система (2.7).








