 2015-01-07
2015-01-07 798
798Используются сдвиговые регистры, которые преобразуют последовательное число.
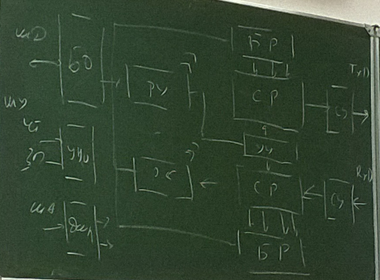
Рисунок 15:57 25.11.2014.
Буферный регистр и регистр обмена данных должны быть связаны.
USART – универсальный асинхронный трансмиттер-ресивер.
UART –
Шина i2c
Достоинства:
1) простота;
2) магистральность;
3) «горячее» подключение.
Недостатки:
1) ограниченность магистралей;
2) выход одной из схем выводит из строя всю систему.
Используется 2 линии:
1) SDA – данные;
2) SCL – синхронизация.
Линии должны быть подтянуты, с помощью сопротивлений, к линиям питания.

Обмен информации ведётся в режиме ведомый-ведущий. На шине может быть несколько ведущих устройств, но передачу может вести только один из них в конкретный момент времени. При обмене информации синхросигналы выдаются ведущим. Передача может вестись в обоих направлениях. Подключение осуществляется с открытым коллектором (такое соединение называется монтажное И).
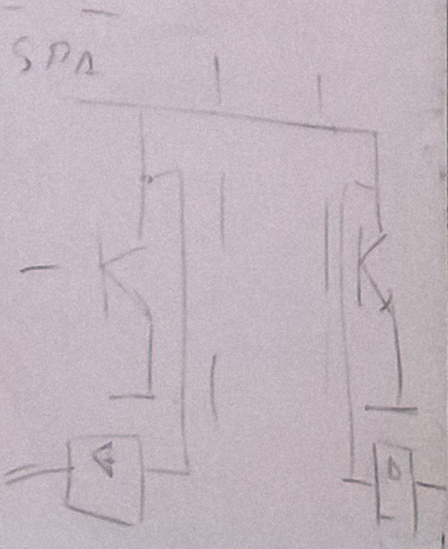
Рисунок 14:42 02.12.2014.
Стандартная скорость 100 кбит/с. Низкоскоростной режим 10 кбит/с. 2-ая версия протокола 400 кбит/с, а скоростной режим 3.4 Мбит/с. Передача информации ведётся байтами, которые имеют служебные биты. После адресного слова идут байты данных. Заканчивается всё стоповым состоянием. При передаче есть бит, указывающий, что передача ведётся правильно.
Исходно состояние – высокий уровень. Шина подтянута к напряжению питания. Величина напряжения зависит от микросхемы. Как правило, для TTL 5 В и может 3.3 В. В некоторых ситуациях может быть и 0.
Старт начинается переходом шины SDA с высокого уровня на низкий уровень при высоком уровне SCL. После подачи стартового состояния, ведущий должен выдавать сигналы синхронизации. Изменение линий SDA должно проходить при низком значении сигнала SCL. Считывание информации осуществляется при единичном значении сигнала SCL. Если произойдёт при 1, то он может быть расценено как старт, либо стоп передачи. Состояние стоп формируется переходом линии SDA. При этом передача информации прекращается и возврат в стартовое состояние.
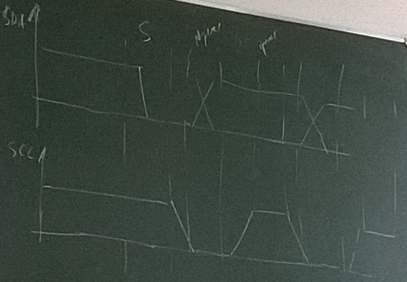
Рисунок 14:53 02.12.2014.
Байт данных начинает передаваться, начиная со старшего разряда. После этого передачи передаётся 9-ый сигнал. При этом передатчик должен освободить линию SDA, а приёмник должен показать, что информация принята.
Адресация устройств
Используется 7-битная адресация, что позволяет подключать 128 устройств, но подключить можно 108. В версии 2 может быть использована 10-битная адресация – позволяет 1008 устройств. В каждой микросхеме присевается свой уникальный адрес, который закладывается в процессе изготовления. В конкретном устройстве могут быть несколько адресов. Если 10-битный адрес, то он выдаётся 2-мя словами. Первый байт имеет формат 11110ххх (последний х направление), второй байт хххххххх.
Запись данных осуществляется после адресного слова. Ведущий последовательно выставляет байты данных и получает сигнал подтверждения, при этом он должен сформировать 8 сигналов синхронизации. Если ведомый не успевает принять данные, он может приостановить передачу путём задержки в нулевом состоянии сигнала синхронизации. Если ведомый не успевает, то он может выставить сигнал не подтверждения. Ведущий прерывает передачу и начинает заново.
При чтении данных происходит смена направления передача – ведущий и ведомый меняются местами. В этом случае сигналы подтверждения формирует мастер. Чтобы прекратит передачу не выставляется сигнал подтверждения после последнего принятого байта. Возможен обмен с индексацией адреса, если используется память.
Арбитраж
При одновременной выдаче сигнала старт формируется общий сигнал синхронизации SCL, так как 2 отдельных устройства формируют отдельные сигнал, каждый свой. При нулевом начальном значении SCL два устройства начинают выдавать адрес, начиная со старшего бита. Если оба бита единичные, то суммарный бит будет единичный. Каждое устройство проверят бит. Если произойдёт несовпадение, то на общей шине сформируется нулевой бит. Получив несоответствие выданного бита устройство отключается, позволяя работать второму активному устройству. Приоритетное устройство, у которого адрес меньше. Такой арбитраж не нарушает логику обмена и позволяет одновременно нескольким устройствам запрашивать обмен.
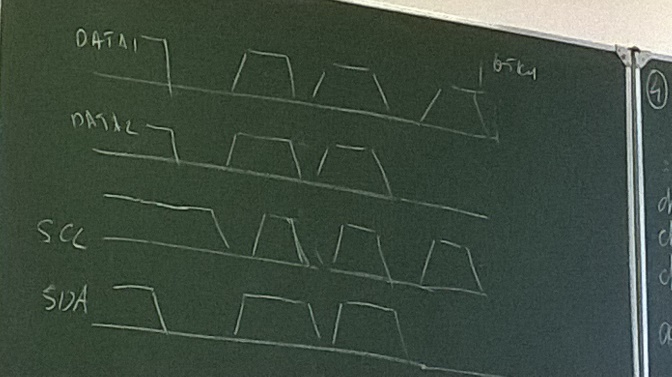
Рисунок 15:39 02.12.2014.
Используются высокоскоростные протоколы. Например, Flex Ray. Он строится на основе оптических линий, обеспечивает скорости до 10 Мб/с. Ещё есть CAN, стандартный такой. А есть низкоскоростной LIN.
Особенности синхронизации сетевых интерфейсов.
1. Топология соединения устройств сети.
1) шинная;
2) кольцевая;
3) древовидная;
2. Передающая среда, используемая для передачи данных.
3. Методы организации доступа к физической среде.
4. Скорость передачи данных.
5. Расстояние передачи данных.
Организация LIN-интерфейса
Разработала Volvo в начале 90-ых годах. Принцип – 1 пассивный и много пассивных, и наоборот. Протокол UART. Полудуплексный режим. Скорость до 20 кб/с. Расстояние до 40 метров. 2 вида сигналов используется для передачи: сигнал пассивного уровня сети от 9 до 12 вольт, сигнал активного уровня близкий к нулю. Информация передаётся побайтно, за каждый сеанс от 2 до 8 байт.
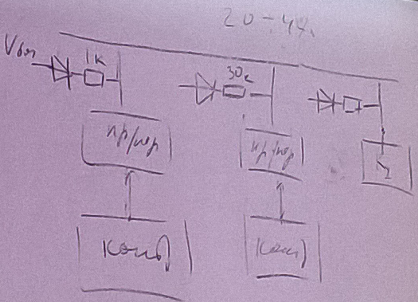
Рисунок 15:43 09.12.2014.
Посылка состоит из 2-х частей: заголовок и ответ. Заголовок формируется мастером. Заголовок состоит из 2-х частей: часть для синхронизации и часть для идентификации. Вначале выдаётся пауза синхронизации. Дальше идёт байт синхронизации. Начинает он с того, что опять подаётся стартовый бит, дальше биты данных и стоповый бит. Идентификатор – это тоже 1 байт: 6 бит для идентификации, 2 бита контрольных. Количество передаваемых байт может быть 2, 4, 8.
CAN-шина
CAN-2A (11 разрядов) и CAN-2B (29 разрядов).
Основное отличие в разрядности. Для автомобильной техники используется ISO 11898. Сесть строится на основе 128-омной витой паре. Волновое сопротивление – 128 Ом.
Максимальная скорость передачи в сети 1 Мбит/с, до 40 метров, когда устройств не более 64. Падение скорости 10 кбит/с на расстоянии до 5 км.
Подключение осуществляется через специальные контроллеры. Обычно на конце линии устанавливают терминаторы, сопротивлением 120 Ом.
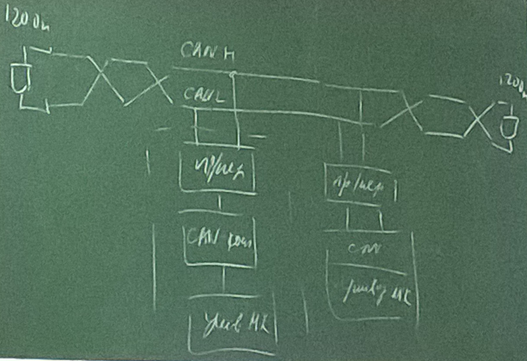
Рисунок 14:44 16.12.2014.
Разъёмы для подключения могут быть разные.
Уровни сигналов.
«0» - CAN H > CAN L.
«1» - CAN H ~= CAN L.
Есть понятия рецессивного и доминантного уровня.
Приёмопередатчики обеспечивают защиту от высоких напряжений, отключение от сети. Передача по сети осуществляется кадрами. Есть несколько типов кадров:
1) кадр данных (фрейм данных);
2) кадр запроса;
3) кадр ошибки;
4) кадр перегрузки.
Передача ведётся в широковещательном режиме.
Кадр данных.
Состоит из нескольких частей: идентификаторов, поля данных, поля контрольной суммы, бит или сигнал подтверждения и сигнал поля конца кадра. Идентификатор определяет назначение информации. Поле данных содержит до 8 байт информации, количество определяется специальным служебным словом из 4-ёх байт. После 8 байт идёт контрольная сумма – CRC-код (специальный код, который формируется из бит банных). Бит подтверждения формируется всеми устройствами, которые находятся в сети.
Кадр запроса.
Содержит идентификатор информации и устанавливается специальный служебный бит. Он есть в формате кадра данных. RTR – запрос на передачу. ПО этому запросу, то устройство, которое должно передать, создаёт идентификатор.
Кадр ошибки.
Если замечена ошибка, то устройство выдаёт 6 доминантных сигналов и 8 рецессивных.
Арбитраж на шине.
Есть 5 процедур проверки правильности на шине:
1. После передачи каждого бита, устройство этот бит само и считывает.
2. «Битстаддинг». Вставка бита противоположной полярности в биты, больше 5.
3. Контрольная сумма.
4. Подтверждение.
5. Кадр-структура.
Подключённое устройство может отключаться от шины, если считает, что оно не исправно. В каждое устройство встроен счётчик ошибок, отдельно ошибки при приёме и при передаче. Если количество ошибок превышает заданную величину, то устройство отключается.
Диагностический интерфейс
K-Line и L-Line. ISO 9141.
KWP ISO 14230.
CAN ISO15765-4.








