 2015-03-27
2015-03-27 1707
1707| Целью расчета является определение энергозатрат, силовых и скоростных режимов рабочих органов и движителей в конкретных условиях работы СМ |
Рассмотрим последовательно основы расчета механического и гидрообъемного привода.
Для механического привода, пренебрегая потерями в цепях управления произведём приближённую оценку энергетических, силовых и скоростных характеристик рабочего и ходового оборудования, которую может обеспечить привод СМ. Создание необходимой величины энергопотока на рабочем органе является необходимым условием реализации рабочего процесса, но недостаточным. Достаточность будет обеспечена, если структура энергопотока, подведенного к рабочему органу, будет соответствовать условиям его нагружения со стороны обрабатываемой среды. Оценка силовых и скоростных характеристик рабочего органа СМ производиться на основании внешней механической характеристики первичного двигателя, передаточных отношений I и КПД (η) всех структур СМ. Так при вращательном движении рабочего органа его угловая скорость (рад/с) и момент вращения (Нм) определяются формулами:
где i - безразмерная характеристика.
При линейном (поступательном) движении рабочего органа, силовая характеристика Р(Н) и скоростная V(м/с) получают по тем же формулам, с учётом того, что i в них размерная характеристика, м-1.
Степень реальной загрузки рабочего органа СМ и, в целом всех устройств ее привода, будет определяться величинами и формами внешних силовых воздействий, воспринимаемых им со стороны среды обработки. Эти воздействия могут быть выражены в функциях координат, скоростей перемещения рабочего органа или времени. В случае их выражения через скорость перемещения рабочего органа их называют нагрузочными характеристиками. В этом случае задача нахождения требуемых режимов статического нагружения состоит в решении системы уравнений Мдв(ω) и приведенной к валу двигателя нагрузочной характеристики
Определение требуемых режимов работы производят в общем случае путем решения дифференциальных уравнений, описывающих динамические явления в системе «привод СМ-среда обработки».
Рассмотрим пример вращательного привода рабочего органа, реализующего технологическую операцию шлифования.
Динамические модели приводов с достаточной точностью могут быть представлены схемами с жесткими кинематическими связями.
В этом случае эквивалентную механическую систему привода можно представить в виде одномассовой системы с массой, приведенной, например, к валу двигателя. В этом случае угол поворота двигателя α будет являться обобщенной координатой системы. Суммарный момент инерции двигателя и приведенной массы I = IДВ + Iпр. В переходном режиме работы привода уравнение его движения будет иметь вид:

где Мд(ω) - момент двигателя, определяемый его механической характеристикой;
Мс(ω) - момент сил сопротивления, определяемый видом выполняемой рабочей операции и характеристиками объекта обработки; ω = dα / dt = α - скорость вращения вала двигателя;
Мдин - динамический момент, обеспечивающий изменение скорости вращения двигателя.
В установившемся статическом режиме работы (dω/dt = 0) уравнение движения привода будет иметь вид
На основании приведенных зависимостей запишем уравнение движения привода мозаично-шлифовальной РМ с асинхронным электродвигателем в статическом режиме, считая усилие прижима инструмента к обрабатываемой поверхности постоянным, и решим его.
В этом случае уравнение статической механической характеристики двигателя имеет вид
где ω0 - угловая частота сети, рад/с;
S - скольжение ротора;S = 1 - /0;
ν - коэффициент крутизны линеаризованной статической характеристики, соответствующий значению dM/dS при S=0; ν=Sк/(2МК);
Sк - критическое скольжение;
Мк - критический момент, определяемый по каталожным данным.
Примем выражение для момента сил сопротивления при шлифовании в виде
Мс – const.
Тогда величина момента сил сопротивления, приведенная к валу двигателя:
где i - передаточное отношение привода;
η - КПД привода.
Решение в виде значений скорости ω1 и ω2 находятся как точки пересечений уравнений статической механической характеристики двигателя и момента сопротивления, приведенного к валу привода (точки 1 и 2). (Рис. 2.24).
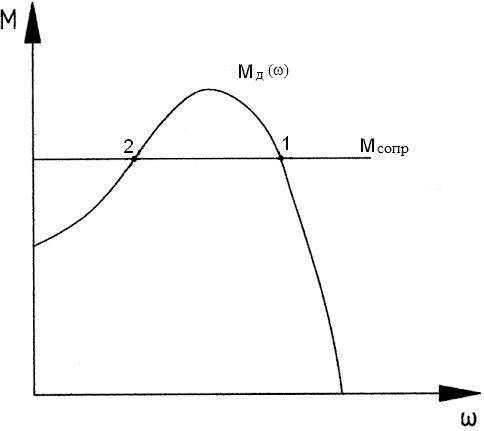
Рис. 2.24
| Установившийся режим привода должен обладать статической устойчивостью, что является определяющим показателем для выбора одного из двух указанных решений. |
Привод будет работать устойчиво, если при отклонении скорости от установившегося значения возникнет динамический момент, стремящийся возвратить его в начальное состояние, т.е. устойчивая работа привода характеризуется условием  Мдин/Δω<0;
Мдин/Δω<0;
где β - коэффициент жесткости механической характеристики.
Следовательно, решением рассматриваемой системы является точка 1, удовлетворяющая условию.
В гидравлическом приводе с позиции рассмотренной ранее структурно-функциональной схемы "СМ-среда обработки" насос является машиной, а создаваемый им поток рабочего тела (расходом Q и давлением р), перемещаемый по напорной части трубопровода, - средой обработки, оказывающей сопротивления его перемещению.
Характеристикой насоса является зависимость создаваемого им давления от величины расхода рабочего тела: р=φн (Q).
Ее вид определяется конструкцией насоса и характеристиками рабочего тела.
Характеристика напорной части трубопровода имеет вид р=А1+А2Q+A3Q2. Функциональная зависимость потерь давления в трубопроводе от расхода определяется составом устройств, входящих в трубопровод, их конструктивным исполнением, качеством самих труб, характеристикой трассы и рабочей среды, режимом течения (ламинарным, турбулентным).
Решение системы уравнений в виде характеристик насосной установки и трубопровода, получаемых на основании уравнения Бернулли, позволяет установить значения параметров р; Q, соответствующих установившемуся режиму работы. Графическая интерпретация решения отображена на рис.2.25, где точка пересечения характеристик - рабочая точка позволяет также оценивать значение мощности, потребляемой насосом.
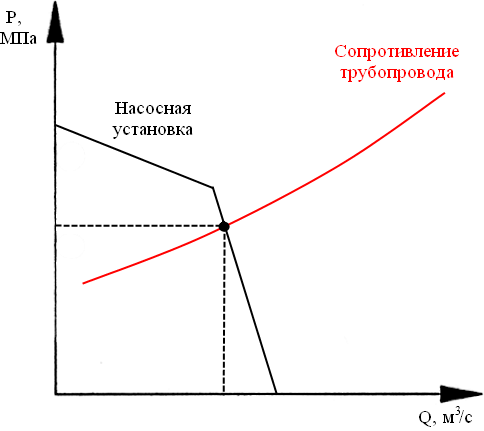
Рис. 2.25

