 2015-03-20
2015-03-20 4138
4138Параметрами машины называют активные и индуктивные сопротивления обмоток. В п. 9 определены некоторые параметры обмотки статора. Ниже приведены формулы для определения параметров роторных и статорных обмоток, необходимых для расчетов переходных и несимметричных режимов работы машины. Рассчитанные значения параметров получаются в относительных единицах, причем параметры цепей ротора приведены к числу витков обмотки статора.
Индуктивное сопротивление обмотки возбуждения
 ,
,
где l'm – расчетная длина сердечника полюса, м; F δо и Фδ – магнитное напряжение воздушного зазора и поток при E=U нф;  , причем λ m l, λ p l и λ m в определяют по приведенным в п. 7 формулам.
, причем λ m l, λ p l и λ m в определяют по приведенным в п. 7 формулам.
Индуктивное сопротивление рассеяния обмотки возбуждения
Индуктивное сопротивление рассеяния демпферной (успокоительной) обмотки по продольной оси

по поперечной оси

Здесь lр – длина полюсного наконечника, м; Fa н – МДС статора при номинальном токе; N c – число стержней на полюс; λв– коэффициент проводимости пазового рассеяния, при круглых полуоткрытых пазах демпферной обмотки (рис. 12.1)
 – коэффициент приводимости дифференциального рассеяния;
– коэффициент приводимости дифференциального рассеяния;
 – коэффициенты проводимости короткозамыкающих колец соответственно по продольной и поперечной осям; cd, cq – коэффициенты приведения, которые находят по рис. 12.2;
– коэффициенты проводимости короткозамыкающих колец соответственно по продольной и поперечной осям; cd, cq – коэффициенты приведения, которые находят по рис. 12.2;
 – коэффициент распределения демпферной обмотки.
– коэффициент распределения демпферной обмотки.
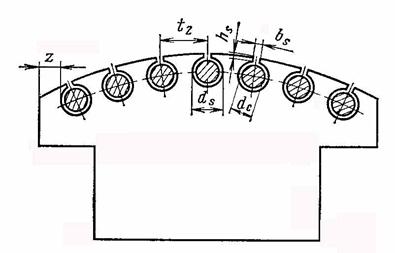
Рис. 12.1
Приведенные выше формулы для расчёта  получены для равномерного распределения стержней на полюсном наконечнике и полной (продольно-поперечной) демпферной обмотки. При неполной (продольной) демпферной обмотке xkd * определяют по приведенной выше формуле, а
получены для равномерного распределения стержней на полюсном наконечнике и полной (продольно-поперечной) демпферной обмотки. При неполной (продольной) демпферной обмотке xkd * определяют по приведенной выше формуле, а

Индуктивное сопротивление нулевой последовательности для двухслойных обмоток
где β= y 1/3 q 1 – укорочение шага обмотка статора; k y – коэффициент укорочения шага обмотки статора для первой гармоники; h п1, b п1 – высота и ширина паза статора; h 1 – высота верхней части паза, не занятой медью (см. рис. 9.2); q 1 – число пазов на полюс и фазу.
Переходные индуктивные сопротивления обмотки статора:
– по продольной оси
– по поперечной оси

Сверхпереходные индуктивные сопротивления обмотки статора:
– по продольной оси
– по поперечной оси
Индуктивные сопротивления обмотки статора обратной последовательности:
– при работе машины на большое внешнее индуктивное сопротивление

– при работе машины на малое внешнее сопротивление (при коротком замыкании)
Активное сопротивление обмотки возбуждения при θ = 75 °С
Активное сопротивление демпферной обмотки при θ = 75 °С:
– по продольной оси

– по поперечной оси

где c с и c кз – отношения удельных сопротивлений материала стержня и кольца к удельному сопротивлению меди (для меди эти коэффициенты равны 1, для латуни – 4, для фосфористой бронзы – 6,5).
Постоянной времени называют отношение индуктивности обмотки к ее активному сопротивлению. От постоянной времени зависит продолжительность протекания соответствующих переходных процессов в синхронной машине.
Постоянная времени обмотки возбуждения при разомкнутых обмотках статора и демпферной, с,
где  – индуктивность обмотки возбуждения.
– индуктивность обмотки возбуждения.
Постоянная времени обмотки возбуждения при замкнутой обмотке статора, с,

Постоянные времени демпферной обмотки при разомкнутых обмотках статора и возбуждения:
– по продольной оси
– по поперечной оси
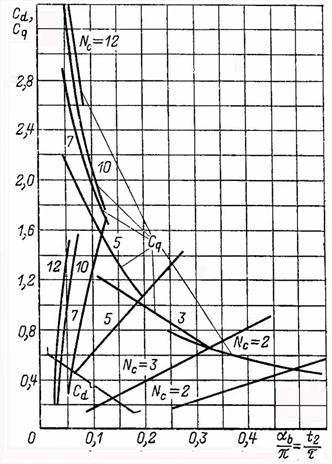
Рис. 12.2
Постоянные времени демпферной обмотки:
– по продольной оси при замкнутой накоротко обмотке возбуждения и разомкнутой обмотке статора

– по продольной оси при замкнутых накоротко обмотке возбуждения и обмотке статора

– по поперечной оси при замкнутой накоротко обмотке статора
Постоянная времени обмотки статора при (закороченных) короткозамкнутых обмотках ротора
Пределы изменения параметров и постоянных времени для реальных современных синхронных машин общего назначения приведены соответственно в табл. 12.1 и 12.2.
Таблица 12.1
| x σ* | r 1* | xd * | xq * | x'd * | x״d * | x״q * | x 2* | x 0* |
| 0,1–0,2 | 0,008–0,02 | 1–2,4 | 0,6–1,6 | 0,2–0,6 | 0,15–0,3 | 0,15–0,4 | 0,15–0,35 | 0,02–0,2 |
Таблица 12.2
| Т d o, c | Т' d, с | Т″ kd в, с | Т а, с |
| 2–10 | 0,8–205 | 0,01–0,08 | 0,03–0,35 |

