2015-04-08
2015-04-08 1213
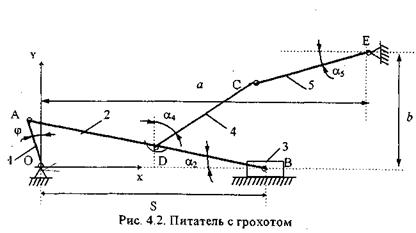
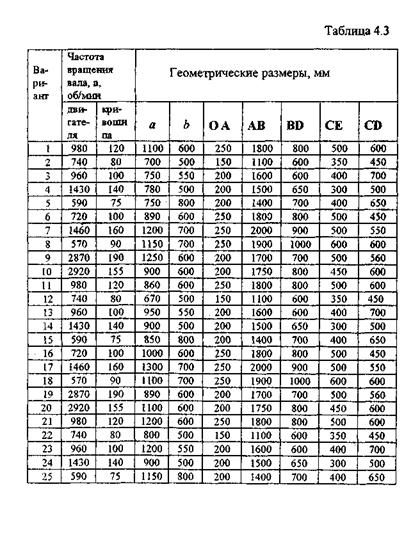
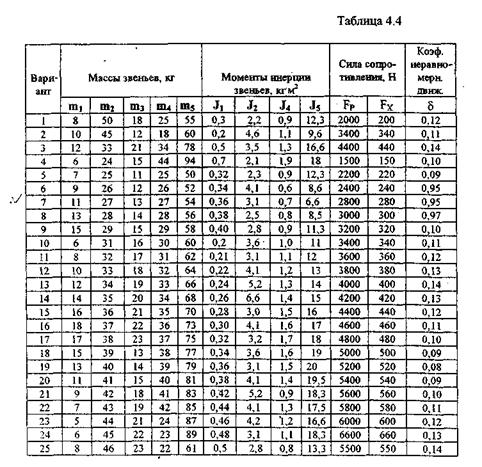
1213Кинематическая схема механизма приведена на рис. 4.2. Плунжерный питатель с грохотом состоит из кривошипа 1, шатунов 2 и 4, сита грохота 5, плунжера (ползуна) 3. Центр масс кривошипа расположен на оси вращения, в точке О, а центры масс остальных звеньев - посередине их длин. Данные для расчета курсового проекта приведены в табл.4.3 и 4.4. Сила сопротивления движению плунжера 3 сохраняет постоянное значение Рр на протяжении всего рабочего хода (рабочий ход слева направо), при холостом ходе сила сопротивления Рх также постоянна.
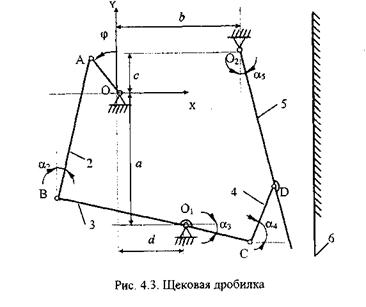
Задание № 5. Щековая дробилка
Кинематическая схема механизма щековой дробилки приведена на рис. 4.3. Дробилка состоит из следующих деталей: кривошипа 1, шатуна 2, коромысла 3, тяги 4, подвижной щеки 5, неподвижной щеки 6. Руда подается в зазор между подвижной щекой 5 и неподвижной щекой б. При рабочем ходе щеки, слева направо, зазор уменьшается и куски руды раздавливаются. При этом на'подвижную щеку 5 действует момент сил сопротивления Мс, направленный навстречу движению щеки:
а) при повороте щеки 0 до 1/3 ее хода Мс линейно возрастает от 0.1Мmax
до Мтах;
б) при повороте щеки от 1/3 хода до ее остановки Mc линейно убывает от
Мmax до 0.1'Мmax;
в) при холостом ходе щеки Мс = 0,1 Мmax.
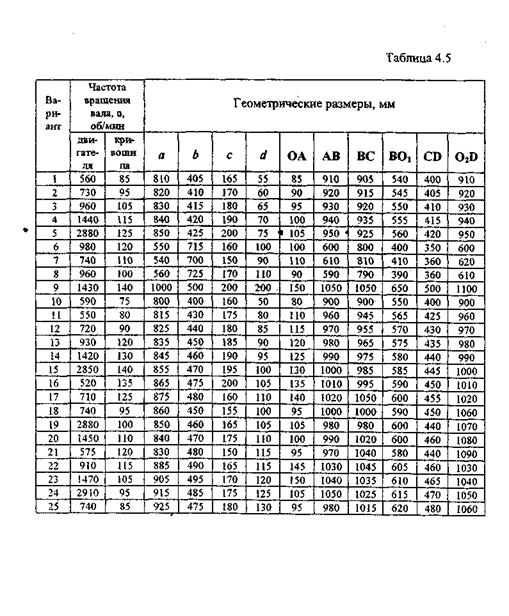
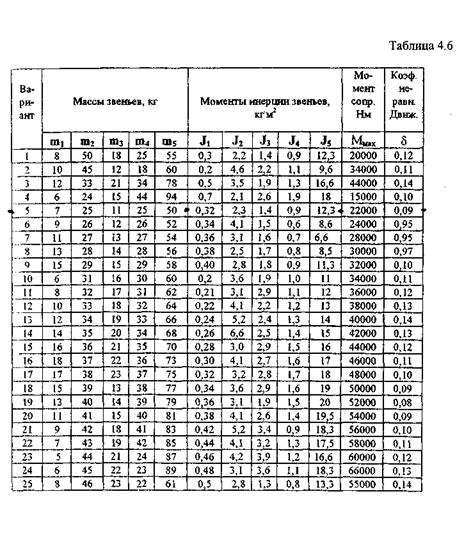
График изменения момента сопротивления следует вычертить в выбранном масштабе, определив предварительно ход щеки, и по графику установить требуемое значение в расчетном положении. Исходные данные приведены в габл. 4.5 и 4.6.
Центр тяжести кривошипа расположен на оси вращения О, центры тяжести остальных звеньев находятся в их середине.