 2015-04-17
2015-04-17 2234
2234Электромагнитный момент асинхронной машины создается в результате взаимодействия тока в обмотке ротора с вращающимся магнитным полем. Связь между моментом и скоростью вращения ротора можно получить из уравнения механической мощности. Если в него подставить выражение для тока ротора, то с учетом того, что угловая частота вращения равна  ,получим
,получим
Все величины, входящие в это выражение константы, кроме скольжения s. Взяв производную  и приравнивая ее нулю, найдем экстремумы функции
и приравнивая ее нулю, найдем экстремумы функции  . Они наступают при критическом скольжении
. Они наступают при критическом скольжении  . К приближенному равенству для критического скольжения можно перейти с учетом того, что
. К приближенному равенству для критического скольжения можно перейти с учетом того, что  . Подставляя критическое скольжение в выражение , получим значение максимального момента
. Подставляя критическое скольжение в выражение , получим значение максимального момента
 . Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
. Знак плюс в этих выражениях соответствует двигательному режиму, а минус – генераторному.
Из выражения для  следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая
следует, что максимальный момент в генераторном режиме больше, чем в двигательном. Однако, пренебрегая  также, как это было сделано для
также, как это было сделано для  , мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
, мы получим упрощенное выражение для максимального момента более удобное для качественного анализа –
 .
.
Полагая  в выражении , получим выражение для пускового момента асинхронного двигателя
в выражении , получим выражение для пускового момента асинхронного двигателя
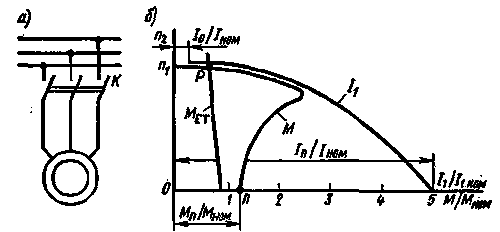
 Полученная зависимость представлена на рисунке. Точка
Полученная зависимость представлена на рисунке. Точка  соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка
соответствует идеальному холостому ходу машины. Этот режим может быть получен только за счет внешнего вращающего момента.Точка  соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от
соответствует пусковому режиму или режиму короткого замыкания. Устойчивая работа машины возможна только в пределах скольжений от  до
до  , т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
, т.к. вне этого участка при увеличении скольжения момент двигателя уменьшается, что приводит к дальнейшему увеличению скольжения (снижению скорости) и этот процесс будет развиваться до полной остановки двигателя. Переход на участок неустойчивой работы называется "опрокидыванием" двигателя. Это происходит, если момент нагрузки больше или равен максимальному, поэтому максимальный момент называют также опрокидывающим.
Номинальный режим работы двигателя соответствует скольжению  . Отношение
. Отношение  называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
называется перегрузочной способностью. Превышение максимального момента над номинальным является необходимым условием надежной работы двигателя.
Если за счет внешнего вращающего момента вал двигателя раскручивается до скорости выше синхронной  , то скольжение становится отрицательным и машина переходит в генераторный режим.
, то скольжение становится отрицательным и машина переходит в генераторный режим.
При скольжениях  скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
скорость вращения будет отрицательной, т.е. ротор двигателя будет вращаться в направлении противоположном направлению вращения магнитного поля и машина перейдет в тормозной режим или режим противовключения.
На рисунке для наглядности критическое скольжение составляет около 0,5. Такие значения в реальных машинах нормального исполнения не бывают. Они находятся в пределах от 0,1 до 0,02, причем меньшие значения соответствуют машинам большей мощности. Поэтому рабочий участок характеристики практически линейный и может быть заменен прямой  .
.
Выражение не позволяет анализировать свойства характеристики в общем виде. Однако, если его разделить на , то получится удобное выражение в относительных единицах, называемое по имени автора формулой Клосса
 .
.
 В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.
В теории электрических машин и электропривода вместо характеристики принято пользоваться механической характеристикой. Механическая характеристика двигателя это зависимость скорости вращения от момента нагрузки на валу, т.е.  . Эту характеристику легко можно получить из характеристики , если учесть, что
. Эту характеристику легко можно получить из характеристики , если учесть, что  , т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости
, т.е. она получается смещением оси момента в точку и изменением масштаба оси скольжений. При этом в новой системе координат режимы работы машины (генераторный, двигательный и тормозной) оказываются в различных квадрантах плоскости  , а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
, а режимы холостого хода и короткого замыкания – в точках пересечения механической характеристики с осями координат.
Линеаризованная механическая характеристика рабочего участка примет вид
12. Пуск асинхронного двигателя. Пуск асинхронного двигателя с фазным и короткозамкнутым ротором. Регулирование частоты вращения асинхронных двигателей.
Способы пуска. При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Иногда к этим требованиям добавляют и другие, обусловленные особенностями конкретных приводов, в которых используют двигатели: необходимость плавного пуска, максимального пускового момента и пр.
Практически используют следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к обмотке статора при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск. Этот способ применяют для пуска асинхронных двигателей с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируют так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L / R сравнительно мало (особенно в малых двигателях), поэтому переходный процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса.
Двигатели обычно пускают с помощью электромагнитного выключателя К - магнитного пускателя (рис. 4.27, а) и разгоняют автоматически по естественной механической характеристике М (рис. 4.27,6) от точки П, соответствующей начальному моменту пуска, до точки Р, соответствующей условию М = М ст. Ускорение при разгоне определяется разностью абсцисс кривых М и М ст и моментом инерции ротора двигателя и механизма, который приводится во вращение. Если в начальный момент пуска М п < М ст, двигатель разогнаться не сможет.
 | Рис. 4.27. Схема прямого пуска асинхронного двигателя и графики изменения моментов и тока |
Значение начального пускового момента можно получить из формулы (4.46а), приняв s = 1:
(4.58)
Мп = m1 U12R'2 /{w1 [(R1 + R'2)2 + (X1 + Х'2)2 ]}.
Отношение моментов М п / М ном = k п.м называют кратностью начального пускового момента. Для двигателей с короткозамкнутым ротором мощностью 0,6—100 кВт ГОСТом установлено k п.м= 1,0÷2,0; мощностью 100-1000 кВт - k п.м = 0,7÷1,0.
Получение кратностей пускового момента, больших регламентированных ГОСТом, обычно нежелательно, так как это связано либо с увеличением активного сопротивления ротора (см. 4.58), либо с изменением конструкции ротора (см. § 4.11), что ухудшает энергетические показатели двигателя.
Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока, в пять — семь раз превышающий номинальное значение тока.
Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором — низкой стоимости и высоким энергетическим показателям (η, cos φ1, k м и др.).
Пуск при пониженном напряжении. Такой пуск применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями:
а) переключением обмотки статора с помощью переключателя с нормальной схемы Δ на пусковую схему Y. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в √3 раз, что обусловливает уменьшение фазных токов в √3 раз и линейных токов в 3 раза. По окончании процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему;
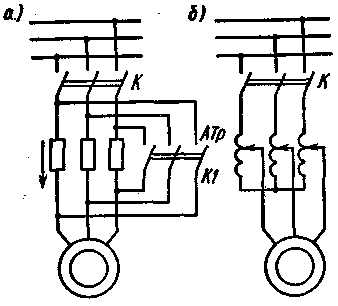 |
| Рис. 4.28. Схемы включения асинхронного двигателя при пуске с понижением напряжения |
б) включением в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений (рис. 4.28, а). При этом на указанных сопротив лениях создаются некоторые падения напряжения Δ U доб, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС Е 2s, индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения Δ U доб на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактором К 1;
в) подключением двигателя к сети через понижающий автотрансформатор АТр (рис. 4.28, 6), который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать только при пуске двигателей без нагрузки.
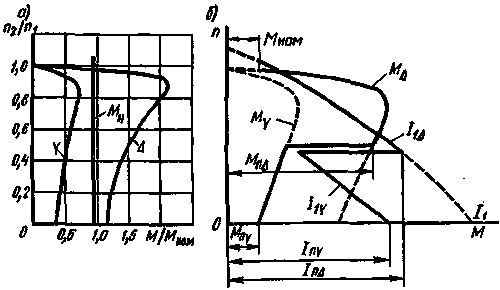 | Рис. 4.29. Механические характеристики при включении обмотки статора двигателя по схемам Y и Δ (а) и графики изменения М и I 1 при пуске двигателя путем переключения обмотки статора со Y на Δ (б) |
На рис. 4.29 для примера приведены механические характеристики двигателя при номинальном и пониженном напряжении, т. е. при соединении обмотки статора по схемам Y и Δ, атакже графики изменения тока I 1 и момента М при пуске двигателя путем переключения обмотки статора со Y на Δ. Присоединении по схеме Y максимальный и пусковой момент уменьшаются в три раза, вследствие чего двигатель не в состоянии осуществить пуск механизма с нагрузочным моментом М н.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30. Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.
 Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК, равенство МП= МПmaх = МК будет обеспечено. Тогда
Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК, равенство МП= МПmaх = МК будет обеспечено. Тогда  .
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату. При моменте, соответствующем точке е, включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате. Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.

