 2015-04-01
2015-04-01 448
448Глава 3. Расчет управляемости судна на ПЭВМ
Целью выполняемых проектировочного и проверочного расчетов управляемости является определение характеристик ДРК и основных маневров судна, на основе которых можно судить об эффективности движительно-рулевого комплекса. Расчет представляет собой моделирование на ПЭВМ различных маневров судна на основе численного интегрирования системы дифференциальных уравнений управляемости судов (2.5).
Подготовительные гидродинамические расчеты
Расчет кривой сопротивления движению
Кривая сопротивления движению судна может быть рассчитана по программам tksopr1.exe и tksopr2.exe из комплекса подготовительных к учебному курсу программ для ПЭВМ.
Результаты расчета представляются в графической и табличной формах, как это показано на рисунке 3.1.
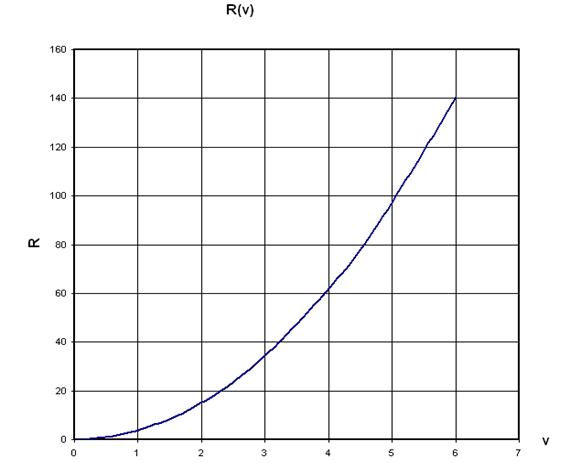
Рис. 3.1. Кривая сопротивления движению судна.
При выполнении расчета следует руководствоваться инструкциями применяемой программы.
Расчет движителей
В задании на расчет должны быть указаны число и тип движителей, а также характеристики двигателя:
Число движителей -;
Тип движителей -
Марка двигателя -
Уровень используемой мощности двигателя  = квт;
= квт;
Номинальная частота вращения гребного вала no= об/с.
Расчет гребного винта выполняется по программе tkdvig.exe. При этом использовалась диаграмма ГВ.
В результате расчета определяются следующие характеристики гребного винта:
Диаметр винта  = м;
= м;
Шаговое отношение  =;
=;
Относительная поступь  ;
;
Коэффициент попутного потока  =;
=;
Коэффициент засасывания  =;
=;
Достижимая скорость хода  = м/с.
= м/с.








