 2015-04-01
2015-04-01 9999
99995.1 Принцип работы машин постоянного тока
Машины постоянного тока (МПТ) представляют собой устройства, пре-образующие электрическую энергию постоянного тока в механическую - и обратно. В первом случае МПТ будет работать как электродвигатель, во втором - как электрогенератор. Принципиальным здесь является то, что конкретная конструкция МПТ может работать и к а к д в и г а т е л ь, и к а к г е н е р а т о р. Такое свойство МПТ называется принципом обратимости.
 Наличие такого свойства данных устройств позволяет излагать теорию дви-гателей и генераторов постоянного тока просто как теорию МПТ. Тем не менее, делать это безотносительно к режиму ее функционирования довольно затруднитель-но, поэтому будем описывать в дальнейшем все процессы в МПТ, рассматривая ее как генератор. На особенно-стях их протекания в режиме двигателя будем останавливаться по мере необходимости.
Наличие такого свойства данных устройств позволяет излагать теорию дви-гателей и генераторов постоянного тока просто как теорию МПТ. Тем не менее, делать это безотносительно к режиму ее функционирования довольно затруднитель-но, поэтому будем описывать в дальнейшем все процессы в МПТ, рассматривая ее как генератор. На особенно-стях их протекания в режиме двигателя будем останавливаться по мере необходимости.
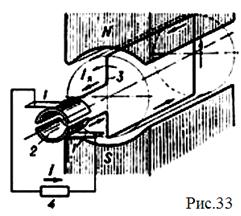
На рис.33 представлена простейшая модель МПТ в режиме генератора. Она состоит из магнитной системы (полюсов), обычной металической ра-мки, помещенной в межполюсное пространство и вращающейся в нем вокруг горизонтальной оси и двух полуколец, с которыми концы рамки непрерывно контактируют в процессе вращения. Из школьной физики известно, что в проводнике, движущемся в магнитном поле, индуцируется ЭДС, направление которой определяется по правилу правой руки. Обращая ладонь вверх (встречно линиям магнитной индукции, В) и ориентируя большой палец по направлению движения горизонтальных сторон рамок, найдем, что в верхней стороне ЭДС направлена к нам, а в нижней - от нас. Это означает, что верхний конец рамки приобретает знак «+», а нижний «-». Так как концы рамок постоянно меняют положение, то на каждом конце индуцируется переменная ЭДС.
Однако при наличии двух н е п о д в и ж н ы х полуколец, напряжение снимаемое ими с вращающихся концов, оказывается одного направления, так как, когда, например, верхний конец рамки меняет знак, он размыкается с верхним полукольцом. А тот конец, который в этот момент входит с ним контакт, приобретает тот знак, который имел ушедший конец.
В результате с колец будет сниматься, так назывемая, п у л ь с и р у ю щ а я ЭДС (рис.34.).
|
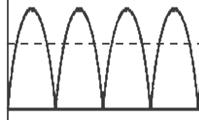 Она будет иметь по времени всегда одно и то же направление, но сильно изменяться по величине. Назвать такую ЭДС постоянной нельзя, хотя у нее появляется п о с т о я н н а я с о с т а в л я ю щ а я (пунктирная прямая на рис.34). Именно появление этой постоянной составляющей позволяет рассма-тривать рамку с полукольцами как простей-шую модель МПТ.
Она будет иметь по времени всегда одно и то же направление, но сильно изменяться по величине. Назвать такую ЭДС постоянной нельзя, хотя у нее появляется п о с т о я н н а я с о с т а в л я ю щ а я (пунктирная прямая на рис.34). Именно появление этой постоянной составляющей позволяет рассма-тривать рамку с полукольцами как простей-шую модель МПТ. Пульсации ЭДС можно уменьшить, если перейти к новой модели МПТ (рис.35), где:
а) вместо одной вращающейся рамки и двух полуколец, используется четыре рамки и четыре полукольца, точнее, - 4 полукруглых пластины;
б) пластины (неподвижные полукольца) сделать подвижными, жестко фиксированными и вращающимися вместе с рамками, а напряжение с них снимать так называемыми щ е т к а м и - мягкими (гра-фитовыми) контактами, неподвижными в пространстве;
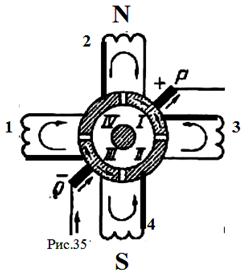
 При вращении такой системы провод-ников, в 1 -ой и 2 -ой рамках ЭДС оказыва-ются направленными вглубь чертежа (жирные стороны рамок ближе к читателю, тонкие - дальше) и по часовой стрелке, а в 4 -ой и 3 -ой рамках - в глубь и против часовой стрел-ки. Другими словами, проводники разбиваю-тся на две группы, в соответствии с их поло-жениями относительно полюсов - первая и вторая рамка находятся под северным полю-сом и при вращении по часовой стрелке имеют одинаковонаправленные ЭДС; третья и чет-вертая оказываются под южным полюсом и также имеют однонаправленные ЭДС, но - противоположные первой паре.
При вращении такой системы провод-ников, в 1 -ой и 2 -ой рамках ЭДС оказыва-ются направленными вглубь чертежа (жирные стороны рамок ближе к читателю, тонкие - дальше) и по часовой стрелке, а в 4 -ой и 3 -ой рамках - в глубь и против часовой стрел-ки. Другими словами, проводники разбиваю-тся на две группы, в соответствии с их поло-жениями относительно полюсов - первая и вторая рамка находятся под северным полю-сом и при вращении по часовой стрелке имеют одинаковонаправленные ЭДС; третья и чет-вертая оказываются под южным полюсом и также имеют однонаправленные ЭДС, но - противоположные первой паре.
В итоге, при замыкании щеток на внешюю нагрузку, ток от щетки Q разделяется на две части: одна часть уходит к рамке «1» и «2» - другая часть идет в рамку «4» и «3». У щетки Р они вновь встречаются и уходят во внешнюю цепь.
Теперь, если посмотреть какие пульсации приобретает в такой модели ЭДС и ток, то обнаруживается следующее (рис.36):
1) ЭДС, снимаемая со щеток(верхняя кривая, 3), становится больше, чем в предыдущей модели благодаря сложению ЭДС рамок одной группы;
2) пульсации суммарной ЭДС уменьшаются в 2 раза (верхняя кривая, 3, отображает пульсации суммарной ЭДС; нижние кривые - пульсации ЭДС рамок 1 и 2 - в том положении, в котором они изображены на рис.36
Из свойств четырехрамочной модели МПТ видны направления, в котором можно совершенствовать конструкцию МПТ:
1) увеличивая число рамок можно увеличивать величину ЭДС, снимаемую со щеток;
2) увеличивая число рамок и одновременно уменьшая размер пластин, можно сколь угодно сильно уменьшить пульсации (угловой размер пластин должен соответствовать угловому расстоянию между соседними проводниками)
3) все рамки должны быть объеденены друг с другом в единую самозамкнутую обмотку.
Историческим синтезом таких конструкционных возможностей МПТ стала машина с кольцевым якорем (рис.37, рис.38).
Якорем называется электротехнический узел машины, в которой индуцируется ЭДС. В машинах постоянного тока якорь является подвижной (вращающейся) частью. В машинах переменного тока ЭДС формируется в обмотках неподвижного статора, который можно рассматривать как неподвижный якорь.
В этой конструкции, активные стороны рамок, в которых при вращении наводится ЭДС, получаются простой навивкой длинного замкнутого проводника на «бублик» (рис.38), или ферромагнитный цилиндр (рис.37).
 |
В простейшем варианте щетки просто прижимаются к внешним сторонам обмотки с противоположных сторон. При всей простоте конструкции, она полностью воспроизводит принципы, заложенные в предыдущей 4-х рамочной модели. При вращении кольцевого якоря в межполюсном пространстве, на внешних сторонах его обмотки наводятся ЭДС параллельного направления таким образом, что ток, втекающий в левый скользящий контакт (рис.37), разделяется на две части и обтекает обмотку с верхней и нижней стороны, снова объединяясь на противоположном скользящем контакте.
На внутренней стороне кольцевого якоря стороны обмоток не вырабатывают ЭДС из за непопадания внутрь якоря магнитного поля (в больших воздушных промежутках его величина резко снижается - магнитное поле «боится пустоты»; см.»Магнитные це6пи»). Поэтому на рис.37 про-водники изображены только с внешней стороны, где воздушный зазор между поверхностью якоря и полюсами очень мал.
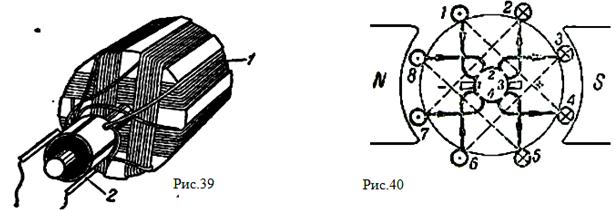
Современные конструкции МПТ используют якорь б а р а б а н н о г о типа. Такой якорь делается в виде сплошного железного сердечника, обмотка которого целиком расположена на внешней стороне. В результате все стороны обмотки учавствуют в создании суммарной ЭДС и эффективность ее использования значительно повышается. Пример простейшего барабанного якоря дан на рис.39., а схема взаимосвязи сторон его обмотки - на рис.40.
5.2 Обмотка якоря МПТ.
Если боковую обмотку барабанного якоря на рис. 39 и рис.40 развернуть в плоскости, то обнаружится, что намотка якоря имеет петлеообразный характер (рис.41). Несмотря на усложненный характер взаимосвязи сторон проводника барабанного якоря (рис.40), все проводники, как и в предыдущих моделях МПТ, разбиваются на две группы с параллельными ЭДС (рис.42). Так же как и в более простых моделях, ЭДС проводников каждой группы взамно складываются друг с другом и образуют две параллельные ветви.
Дальнейшее совершенствование обмоток якорей машин постоянного тока имеет технологический характер. В частности, вместо изображенной на
рис.41 п е т л е в о й обмотки, применяют в о л н о в у ю обмотку (рис.44).
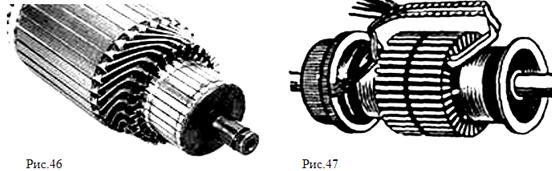
Для повышения эффективности использования обмоток применяют различные варианты укладки. Технологически, обмотка якоря укладывается в пазы барабана якоря (рис.45). Если в каждый паз укладывается только одна ее сторона, то получается о д н о с л о й н а я обмотка - такой принцип укладки дан на рис.41. В этом случае для N проводников требуется N пазов и N/2 коллекторных пластин. Однако плотность обмотки на поверхности якоря, а, следовательно, и величину ЭДС машины, можно увеличить, если в каждый паз укладывать д в е ее стороны - друг на друга (рис.45). Схема такой, д в у х с л о й н о й обмотки, приведена на рис.43. а вид якоря - на рис.46. В этом случае для укладки N проводников требуется N/2 пазов и N/2 коллекторных пластин - т.е. плотность укладки существенно повышается.
Существуют и более сложные обмотки – с 4-мя, 6-ю сторонами в одном пазу; несколькими параллельными петлевыми обмотками и т.д.
 |
5.3
5.3 Основные формулы МПТ
Основные формулы машин постоянного тока определяют: а) ЭДС обмотки якоря; б) связь напряжения на клеммах машины с током в обмотке якоря; в) вращающий момент на валу машины. Найдем сначала фор-мулу ЭДС в обмотке якоря - ее теоретическое определение важно для анализа работы МПТ как в режиме генератора, так и в режиме двигателя.
1. Если на боковой поверхности якоря лежат N проводников, то при вращении в них наводится суммарная ЭДС:

где е - эдс, в одном проводнике, а N/2 - число проводников в одной ветви (напомним, что все проводники якоря распадаются на две группы с одинаковыми и параллельными эдс).
Из школьной физики известно, эдс проводника, движущемся в магнитном поле, определяется по формуле  , где υ - скорость проводника, B – индукция магнитного поля, l – его длина, α - угол между υ и B; в машине ПТ он равен 900 и sinα =1.
, где υ - скорость проводника, B – индукция магнитного поля, l – его длина, α - угол между υ и B; в машине ПТ он равен 900 и sinα =1.
Выразим скорость движения проводников через скорость вращения якоря n (об/мин):

Здесь π D - длина окружности якоря, Т - период его вращения, f =1/ Т - частота. В результате подстановки приходим к формуле:

Выражение в скобках представляет собой боковую поверхность якоря, которую выразим в виде
S = π Dl= 2Sp, где Sp - половина боковой площади якоря, находящаяся под одним полюсом. Если эту площадь умножить на В, то получаем магнитный поток Ф, пронизывающий якорь. Следовательно:

Полученная формула решает поставленный вопрос. Окончательная формула имеет вид;
и содержит коэффициент «с» - учитывающий усложненные конструкции обмотки якоря.
2. Связь между напряжением на клеммаах U и ЭДС найдем из закона Ома для полной цепи - имея ввиду, что ЭДС машины, сопротивление якоря rя и внешнее напряжение U образуют замкнутую цепь.
 - в режиме генератора
- в режиме генератора
 - в режиме двигателя
- в режиме двигателя
Здесь учтено, что в режиме генератора, напряжение является частью ЭДС, а в режиме двигателя, наоборот - ЭДС является частью напряжения
Вращающий момент определим из базовой формулы М= F∙L= F∙D/2, в соответствии с которой он равен произведению силы на плечо. Силы, создающие вращение якоря, являются не чем иным как силами Ампера  , действующие на каждый проводник. Следовательно, суммарный момент, приводящий во вращение якорь равен:
, действующие на каждый проводник. Следовательно, суммарный момент, приводящий во вращение якорь равен:

Таким образом:

5.4 Двигатели постоянного тока (ДПТ)
Машины постоянного тока наибольшее примененение нашли в качестве электродвигателей. Этому способствовали ряд их ценных качеств:
а) простота управления;
б) практически линейные механические и регулировочные характеристики;
в) легкость регулирования частоты вращения;
г) хорошие пусковые свойства (большие пусковые моменты);
д) возможность существенного варьирования механических свойств при незначительных конструкционных изменениях.
По использованию в качестве генераторов, МПТ значительно уступают машинам переменного тока.
На рис.48 представлен общий вид ДПТ, а также четыре варианта его исполнения (рис.49).
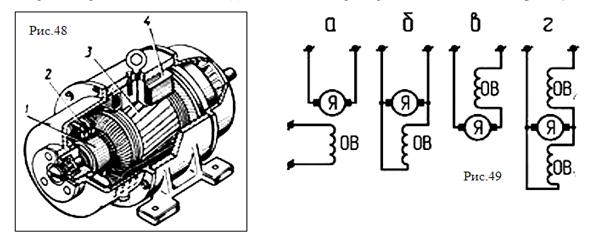
Основными элементами двигателя являются (рис.48):
1) коллектор; 2) щетки; 3) якорь с обмоткой: 4) обмотка возбуждения.
Коллектор представляет собой выпрямительный узел в виде цилиндрического пакета медных пластин, напрямую связанных с витками (секциями) обмотки якоря (ОЯ). К каждой пластине припаивается две стороны двух разных секции, так что число пластин коллектора совпадает с числом секций в обмотке якоря.
Щетки, как уже говорилось выше, представляют собой графитовые скользящие контакты, через которые в обмотку якоря поступает ток. Сам якорь (Я) образует важнейший узел двигателя, - - именно на нем создается вращающий момент двигателя. Обмотка в пазы якоря укладывается таким образом, чтобы в ней уместилось 2, 4 или 6 сторон ее секций. Это означает, что количество пазов может быть либо равно числу секций, либо составлять от них половину, либо одну треть.
Обмотка возбуждения (ОВ) представляет собой второй важный узел ДПТ. Ее функция заключается в создании магнитного поля, под действием которого якорь приходит во вращение. Вместе с Я, ОВ отображается на схемах ДПТ (рис.49).
В зависимости от того, как ОЯ и ОВ электрически соединяются друг с другом, различают четыре типа двигателей (рис.49): а) двигатель с независимым возбуждением; б) двигатель с параллельным возбуждением; в) двигатель споследовательным возбуждением; г) двигатель со смешанным возбуждением
Характер соединения обмотки возбуждения (ОВ) с обмоткой якоря (ОЯ) оказывает существенное влияние на свойства двигателя. В этом можно убедиться с помощью двух важнейших характеристик ДПТ: а) зависимости скорости вращения якоря n от величины нагрузки; б) зависимости вращающего момента М от величины нагрузки. Математически эти зависимости выражаются через функции n= n (I) и М= М(I), где I - рабочий ток двигателя. Действительно, нагрузка на валу двигателя проявляется в возникновении на нем тормозного момента и замедлении его вращения, а последнее ведет к снижению ЭДС в обмотке якоря. Из уравнения же напряжения двигателя  следует, что снижение ЭДС ведет к увеличению тока, так как их сумма должна быть равна питающему напряжению, которое всегда постоянно. Таким образом, увеличение нагрузки атоматически означает увеличение тока.
следует, что снижение ЭДС ведет к увеличению тока, так как их сумма должна быть равна питающему напряжению, которое всегда постоянно. Таким образом, увеличение нагрузки атоматически означает увеличение тока.
Зависимость n = n (I) можно получить комбинируя уравнения  и
и  . Для этого запишем ЭДС в упрощенном виде
. Для этого запишем ЭДС в упрощенном виде  и подставим в уравнение для напряжения
и подставим в уравнение для напряжения  ; тогда получим
; тогда получим  , откуда преобразованием найдем:
, откуда преобразованием найдем:

Точная зависимость М= М(I) уже была получена выше:
 Принцип работы двигателей посто-янного тока основан на возникновении сил Ампера в проводниках обмотки якоря. При подаче внешнего напряжения на щетки дви-гателя, в них возникает ток, который, в маг-нитном поле обмотки возбуждения порож-дает силу
Принцип работы двигателей посто-янного тока основан на возникновении сил Ампера в проводниках обмотки якоря. При подаче внешнего напряжения на щетки дви-гателя, в них возникает ток, который, в маг-нитном поле обмотки возбуждения порож-дает силу  . Направление этой силы определяют по правилу левой руки. Пос-кольку любой ток создает магнитное поле, то силу Ампера можно рассматривать как результат взаимодействия магнитного поля ОВ с магнитным полем ОЯ.
. Направление этой силы определяют по правилу левой руки. Пос-кольку любой ток создает магнитное поле, то силу Ампера можно рассматривать как результат взаимодействия магнитного поля ОВ с магнитным полем ОЯ.
На рис.50 показаны конфигурация магнитных полей ОЯ и ОВ при работе двигателя. Из этого рисунка видно, что магнитное поле якоря при любом его положении всегда ориентировано перпендикулярно магнитному полю обмотки возбуждения - это определяется правилом буравчика. В частности, учитывая, что ток в верхних проводниках на рис. 50 входит в плоскость чертежа, а в нижних - выходит, находим, что поле ОЯ ориентировано горизонтально с указанным расположением полюсов. Вращение якоря возникает в результате взаимодействия магнитных полей ОВ и ОЯ, как следует из ориентации полюсов, против часовой стрелки. В режиме генератора, для получения изображенной ориентации магнитных полей якорь необходимо вращать по часовой стрелке.
Наложение магнитного поля якоря на магнитное поле ОВ приводит к несимметрии суммарного магнитного поля и носит название р е а к ц и и я к о р я. Реакция якоря приводит к возникновению явлений, отрицательно сказывающихся на рабочих параметрах машины: а) к суммарному размагничиванию магнитного поля ОВ (при больших токах) и, тем самым, - к уменьшению ЭДС; б) к смещению межполюсной (физической) нейтрали на некоторый угол и нарушению нормальных условий коммутации. В последнем случае это выражается в искрении щеток, которые переходят, вследствие вращения якоря, с одной пластины на другую не в момент обнуления ЭДС на соответсствующих сторонах секций обмотки, а несколько позже. Это ведет к постепенному разрушению щеток. Уменьшение же ЭДС ведет к уме-ньшению вращающего момента.
Рассмотрим теперь особенности работы разных типов двигателей.
А. Двигатели с независимым и параллельным возбуждением (рис.51, «а», «б») имеют сходные свойства по отношению к нагрузке.
Во-первых, магнитное поле их обмоток возбуждения является постоянным и не зависящим от величины рабочего тока - весь он поступает только в якорь.
 Во-вторых, из-за малого сопротивления якорной обмотки современных МПТ(десятые и сотые доли ома), падение напряжения в них даже при больших токах является не очень значительным. Это приводит к тому, что при нагрузке, даже незначительное замедление вращения приводит к резкому возрастанию тока и увеличению сил Ампера в каждом проводнике. В результате вращающий момент двигателя возрастает и преодолевает момент нагрузки практически без изменения скорости. Математически это следует и из формулы зависимости n = n (I). Знаменатель формулы с0Ф явля-ется постоянной величиной; величина I∙rя, даже при значи-тельных токах, меняется нез-начительно. Следовательно, значение n будет практичес-ки постоянным при измене-нии рабочего тока.
Во-вторых, из-за малого сопротивления якорной обмотки современных МПТ(десятые и сотые доли ома), падение напряжения в них даже при больших токах является не очень значительным. Это приводит к тому, что при нагрузке, даже незначительное замедление вращения приводит к резкому возрастанию тока и увеличению сил Ампера в каждом проводнике. В результате вращающий момент двигателя возрастает и преодолевает момент нагрузки практически без изменения скорости. Математически это следует и из формулы зависимости n = n (I). Знаменатель формулы с0Ф явля-ется постоянной величиной; величина I∙rя, даже при значи-тельных токах, меняется нез-начительно. Следовательно, значение n будет практичес-ки постоянным при измене-нии рабочего тока.
На практике это означает, что двигатели с па-раллельным и независимым возбуждением могут использоваться там, где при переменных нагрузках требуется стабильность вращения (металорежущие и печатные станки, эскалаторы, подъемники, вентиляторы, насосы и т.д.) Отличие же двигателя с независимым возбуждением от двигателя с параллельным возбуждением заключается в возможности первого менять магнитный поток обмотки возбуждения и тем самым - регулировать скорость вращения вала двигателя. На рис.51, (а) показаны графические зависимости скорости вращения вала двигателя и его момента от рабочего тока в двигателе. Незначительное (3-5%) падение скорости вращения якоря с ростом тока связано с гашением части напряжения внутренним сопротивлением обмотки и снижением вследствие этого необходимой ЭДС.
В. Двигатели с последовательным возбуждением (рис.51, «б») имеют ОЯ и ОВ, включенными последовательно. Это означает, что, в отличие от предыдущих двигателей, рабочий ток идет не только в обмотку якоря, но и в обмотку возбуждения. В результате при росте рабочего тока магнитный поток ОВ будет также расти. Так как ЭДС двигателя всегда должна быть близкой к напряжению на клеммах, то рост ее составляющей за счет магнитного потока должен быть скомпенсирован соответствующим падением составляющей, связанной со скоростью вращения. Другими словами, с ростом тока, скорость вращения якоря должна заметно снижаться.
Эти качественные рассуждения подтверждают и формулы. Выразим магнитный поток Ф ОВ через ток -  ; тогда скорость вращения якоря будет иметь вид:
; тогда скорость вращения якоря будет иметь вид:
Получившаяся зависимость аналогична известной зависимости в школьной математике

которая, как известно, описывает гиперболу. Следовательно, зависимость n = n (I) на графике будет также иметь гиперболический характер (рис.51,б).
Зависимость вращающего момента от рабочего тока будет более сильной, чем для ДПТ с параллельным и независимым возбуждением:

Формула показывает, что она имеет квадратичную зависимость (рис.51, б). Это делает ДПТ последовательного возбуждения устройством с исключительно большими силовыми возможностями и позволяет использовать его там, где требуется развивать значительный вращательный момент при небольших скоростях вращения (стартеры автомобилей, краны и тельферы с электроприводом, электроприводы тролейбусов, трамваев ит.д.).
Из механики известно, что вращающий момент определить по формуле  . Отсюда:
. Отсюда:
 ,
,
где F – вращающая сила, r – плечо вращения (радиус якоря), υ – линейная скорость вращения; Р - мощность на валу двигателя; f - частота вращения якоря в сек. Поэтому вращающий момент двигателя можно определить также и по его выходной мощности, а также n (числу оборотов ро-тора в мин):

С. Двигатели со смешанным возбуждением являются сочетанием двигателей первых двух типов. В них часть обмотки возбуждения включается с обмоткой якоря параллельно, а часть - последовательно. В результате двигатель приобретает характеристики, промежуточные между характеристиками предыдущих двигателей. Изменяя в обмотке возбуждения долю параллельных и последовательных витков, можно плавно менять свойства двигателя.
В частности, по сравнению с двигателями параллельного возбуждения данные двигатели приобретают более «мягкую» пусковую характеристику, проявляющуюся в более плавном увеличении скорости вращения. В самом деле, в момент пуска у всех двигателей возникают большие токи. Согласно гиперболической кривой n = n (I), последовательная часть обмотки в такой момент обеспечит невысокую скорость вращения якоря, т.е. плавный пуск. По мере разгона якоря, ток начнет уменьшаться и в соответсствии со схемой соединения частей обмоток на рис.49, «г» доля напряжения на последовательной обмотке начнет уменьшаться, а на параллельной - увеличиваться. В результате скоростная характеристика примет более «жесткий» характер, т.е. изменение скорости вращения с изменением рабочего тока станет менее заметным (режим вращения - более стабильным).
Такие двигатели используется, например, в лифтах, где начало движения должно быть плавным, а дальнейшее движение - постоянным при различной нагрузке. Скоростная зависимость двигателя со смешанным возбуждением изображена на рис51, «б» пунктиром.

