 2015-04-01
2015-04-01 2366
2366Механизм представляет собой сложную систему звеньев, нагруженных различными силами и моментами. Чтобы упростить определение закона движения такой сложной системы, применяют метод приведения сил и масс, который позволяет заменить реальный механизм некоторой эквивалентной (расчетной) схемой - одномассовой динамической моделью механизма (рис. 16). Вращающееся звено динамической модели двинется так, что его координата  совпадает в любой момент времени с координатой
совпадает в любой момент времени с координатой  начального звена механизма (обобщенной координатой механизма):
начального звена механизма (обобщенной координатой механизма):  . К звену модели приложен приведенный момент сил
. К звену модели приложен приведенный момент сил  , а момент инерции
, а момент инерции  этого звена относительно оси вращения является суммарным приведенным моментом инерции механизма
этого звена относительно оси вращения является суммарным приведенным моментом инерции механизма  .
.
а) метод приведения, сил и моментов пар сил
 Суммарный приведенный момент заменяет все силы и моменты, приложенные к различным звеньям механизма, и равен
Суммарный приведенный момент заменяет все силы и моменты, приложенные к различным звеньям механизма, и равен
 (24)
(24)
Величина каждого  определяется из условия равенства элементарных работ действительной силы (или момента) и приведенного момента на возможных перемещениях. Приведенный момент
определяется из условия равенства элементарных работ действительной силы (или момента) и приведенного момента на возможных перемещениях. Приведенный момент  , заменяющий действительную силу P, приложенную в точке K некоторого звена механизма, определяется по формуле
, заменяющий действительную силу P, приложенную в точке K некоторого звена механизма, определяется по формуле
 (25)
(25)
где  - линейная спорость точки K приложения силы;
- линейная спорость точки K приложения силы;
 - угловая скорость звена динамической модели, равная угловой скорости начального звена механизма.
- угловая скорость звена динамической модели, равная угловой скорости начального звена механизма.
Отношение скоростей  м/рад в литературе называют аналогом линейной скорости точки K, или передаточной функцией.
м/рад в литературе называют аналогом линейной скорости точки K, или передаточной функцией.
Приведенный момент  , заменяющий действительный момент M, приложенный к i -му звену механизма, определяется по формуле
, заменяющий действительный момент M, приложенный к i -му звену механизма, определяется по формуле
 (26)
(26)
где  - угловая скорость i -ого звена.
- угловая скорость i -ого звена.
Отношение угловых скоростей  передаточная функция (передаточное отношение).
передаточная функция (передаточное отношение).
Знак приведенного момента определяется знаком действительной силы: если действительная сила (или момент) положительна, т.е. совершает положительную работу, то и приведенный момент положителен, т.е. направлен по угловой скорости звена динамической модели. Следовательно, в формуле (25)  берется по абсолютной величине.
берется по абсолютной величине.
Отношения скоростей зависят от положения механизма, а не от скорости его движения. Следовательно, приведение сил может выполняться без знания действительного закона движения звеньев.
Пример. Рассмотрим определение приведенных моментов, заменяющих действительные силы и моменты, приложенные к звеньям механизма двухцилиндрового двигателя (см. рис. 13). К данному механизму приложены  и
и  - движущие силы, действующие на звенья 3 и 5;
- движущие силы, действующие на звенья 3 и 5;  ,
,  ,
,  ,
,  ,
,  - силы тяжести звеньев;
- силы тяжести звеньев;  - приложенный к звену 1 момент сопротивления со стороны той рабочей машины, которую приводит в движение двигатель. Начальный звеном механизма является коленчатый вал двигателя - звано 1, имеющее угловую координату и вращающееся с угловой скоростью
- приложенный к звену 1 момент сопротивления со стороны той рабочей машины, которую приводит в движение двигатель. Начальный звеном механизма является коленчатый вал двигателя - звано 1, имеющее угловую координату и вращающееся с угловой скоростью  . Звено динамической модели имеет угловую координату и вращается с угловой скоростью
. Звено динамической модели имеет угловую координату и вращается с угловой скоростью  . В каждый момент времени координаты и их производные по времени совпадают:
. В каждый момент времени координаты и их производные по времени совпадают:  ;
;  .
.
Для определения величины приведенного момента  , заменяющего движущую силу , воспользуемся формулой (25), которая примет вид
, заменяющего движущую силу , воспользуемся формулой (25), которая примет вид
 (27)
(27)
так как
 Передаточную функцию
Передаточную функцию  , найдем, построив для рассматриваемого положения механизма план возможных скоростей (т.е. без масштаба, для произвольной величины , задавшись постоянный отрезком
, найдем, построив для рассматриваемого положения механизма план возможных скоростей (т.е. без масштаба, для произвольной величины , задавшись постоянный отрезком  ) (рис. 17). Тогда
) (рис. 17). Тогда
где  - длина кривошипа;
- длина кривошипа;
 и - отрезки, изображающие скорости
и - отрезки, изображающие скорости  и
и  .
.
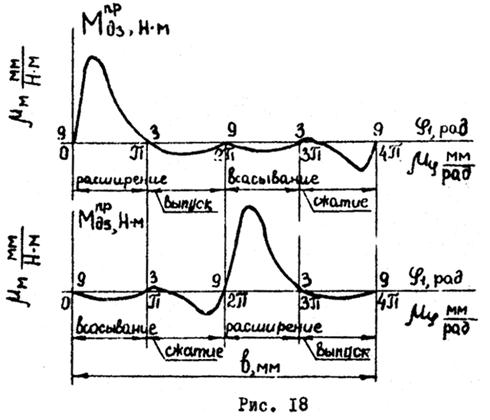
Величину силы в каждом положении механизма следует взять из построенного ранее графика  (см. рис.13). Знак момента определяется знаком силы . Момент следует вычислить для каждого положения механизма и затем построить график изменения приведенного момента
(см. рис.13). Знак момента определяется знаком силы . Момент следует вычислить для каждого положения механизма и затем построить график изменения приведенного момента  .
.
На графиках приведенных моментов здесь и далее по оси абсцисс следует откладывать угол поворота - звена динамической модели. Для нашего примера в каждый момент времени ( - угол поворота начального звена 1). Угол удобно отсчитывать от мертвого положения механизма, принятого за начальное. Так как цикл работы механизма в рассматриваемом случае равен двум оборотам звена 1, то по оси абсцисс следует отложить угол
- угол поворота начального звена 1). Угол удобно отсчитывать от мертвого положения механизма, принятого за начальное. Так как цикл работы механизма в рассматриваемом случае равен двум оборотам звена 1, то по оси абсцисс следует отложить угол  рад. Если база графика равна b мм, то масштаб по оси абсцисс равен
рад. Если база графика равна b мм, то масштаб по оси абсцисс равен  мм/рад.
мм/рад.
Масштаб по оси ординат графика назначается с учетом желаемой максимальной ординаты:
 (28)
(28)
Заметим, что в тех машинах (двухтактный двигатель внутреннего сгорания, компрессор, ковочный пресс и др.), где продолжительность цикла равна одному обороту начального звена, по оси абсцисс следует отложить угол  рад.
рад.
Примерный вид графика представлен на рис. 18.
Результаты расчета рекомендуется поместить в расчетно-пояснительной записке в виде таблицы по следующему образцу
| Величина | Размерность | Положения механизма | |||
| … | |||||
 | мм | ||||
 | Н | ||||
| | мм | ||||
 | – | ||||
 | м | ||||
 |  |
Момент  , заменяющий силу , определяется аналогично. График
, заменяющий силу , определяется аналогично. График  построен с учетом того, что рабочий процесс в правом цилиндре сдвинут по фазе на угол по отношению к процессу в левом цилиндре (рис. 18).
построен с учетом того, что рабочий процесс в правом цилиндре сдвинут по фазе на угол по отношению к процессу в левом цилиндре (рис. 18).
При построении графиков приведенных моментов для многоцилиндровых машин следует обязательно учитывать угол сдвига фаз рабочих процессов в цилиндрах машины.
Найдем приведенные моменты, заменяющие силы тяжести звеньев.
Приведенный момент  , заменяющий силу тяжести звена 1, равен
, заменяющий силу тяжести звена 1, равен
так как скорость точки O  .
.
Приведенный момент  , заменяющий силу тяжести звена 2, равен
, заменяющий силу тяжести звена 2, равен
 (29)
(29)
где отношение скоростей  находим с помощью плана возможных скоростей по формуле
находим с помощью плана возможных скоростей по формуле
Так как зависит от положения механизма, то следует найти его значение для каждого положения и затем построить график  .
.
Аналогично определяется приведенный момент  , заменяющий силу тяжести звена 4.
, заменяющий силу тяжести звена 4.
Приведенный момент  , заменяющий силу тяжести звена 3, равен
, заменяющий силу тяжести звена 3, равен
так как 
Аналогично  .
.
Во многих машинах приведенные моменты от сил тяжести звеньев малы (по сравнению с приведенными моментами от сил движущих и сопротивления) и ими можно пренебречь.
Приведенный момент  , заменяющий момент сопротивления
, заменяющий момент сопротивления  найдем по формуле (26), которая примет вид
найдем по формуле (26), которая примет вид
 (30)
(30)
В данном случае приведенный момент равен действительному монету , так как последний приложен к начальному звену.
Зная в каждом положении механизма величины приведенных моментов, можно, сложив их алгебраически, получить суммарный приведенный момент
 (31)
(31)
и построить график  .
.
Момент  , приложенный к звену динамической модели, производит ту же роботу, что и все реальные силы и моменты, приложенные к различным звеньям механизма.
, приложенный к звену динамической модели, производит ту же роботу, что и все реальные силы и моменты, приложенные к различным звеньям механизма.
б) Метод приведения масс
В основу метода приведения масс положено условие равенства кинетической энергии всех звеньев механизма и звена динамической модели. В этом случае закон движения последнего будет таким же, как и закон движения начального звена реального механизма.
Для определения приведенного момента инерции  каждого звена механизма необходимо составить равенство кинетических энергий рассматриваемого звена и звена модели.
каждого звена механизма необходимо составить равенство кинетических энергий рассматриваемого звена и звена модели.
В зависимости от характера движения звена существуют следующие варианты равенстве кинетических энергий:
1. При поступательном движении i-го звена механизма
 ,
,
откуда
 (32)
(32)
2. При вращательном движении звена вокруг неподвижной оси K
 ,
,
откуда
 (33)
(33)
3. При плоскопараллельном движении звена
откуда
 (34)
(34)
где  ,
,  - передаточные функции.
- передаточные функции.
Суммарный приведенный момент инерции всего механизма равен сумме приведенных моментов инерции всех его звеньев и зависит от положения механизма:
 (35)
(35)
 зависит от отношения скоростей и может определяться без учета действительного закона движения звеньев.
зависит от отношения скоростей и может определяться без учета действительного закона движения звеньев.
В качества примера определим суммарный приведенный момент инерции механизма, изображенного на рис. 13. Звено 1 - начальное звено механизма. Приведенный момент инерции звена 3 находится по формуле
Заменяя  и переходя к отрезкам, взятым из плана возможных скоростей, получил
и переходя к отрезкам, взятым из плана возможных скоростей, получил
 (36)
(36)
Аналогично для звена 5

Приведенный момент инерции звена 2 определится по формуле
Заменяя  и переходя к отрезкам, получим
и переходя к отрезкам, получим
 (37)
(37)
Аналогично для звена 4

Рекомендуется предварительно подсчитать величины, не зависящие от положения механизма, например  ;
;  и т.д.
и т.д.
Результаты расчета для каждого  заносят в таблицу и помещают в расчетно-пояснительной записке.
заносят в таблицу и помещают в расчетно-пояснительной записке.
| Величина | Размерность | Положения механизма | |||
| … | |||||
 | – | ||||
 | – | ||||
 |  |
Приведенный момент инерции звена 1 определится по формуле
 (38)
(38)
Суммарный приведенный момент инерции всего механизма
 (39)
(39)
Построив графики приведенных моментов инерции отдельных звеньев  масштабе
масштабе  , можно получить график суммарного приведенного момента инерции
, можно получить график суммарного приведенного момента инерции  .
.

